设计简介
摘要
本次的设计是螺栓装配机械手的结构设计,螺栓装配机械手作为工业机械手中的重要研究对象,已广泛应用于工业装配线中,有效地完成了零部件的装配,高精度电子产品及其部件的组装,可以代替人类完成一些繁琐的工作。
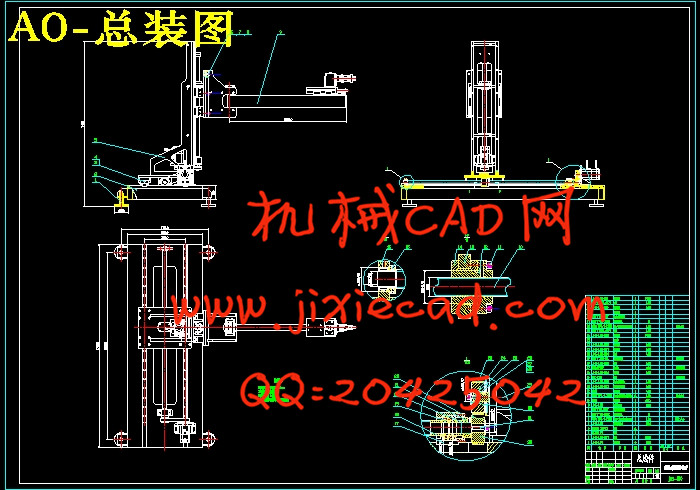
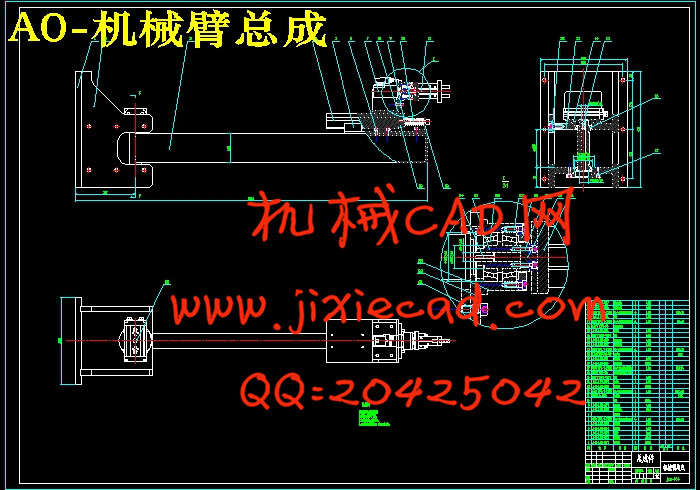
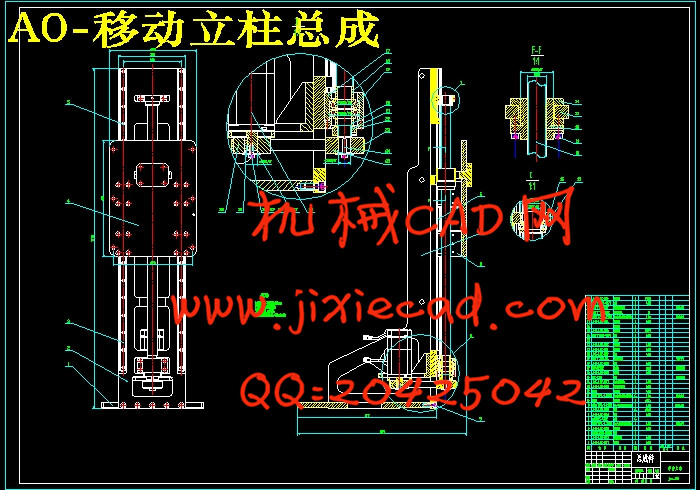
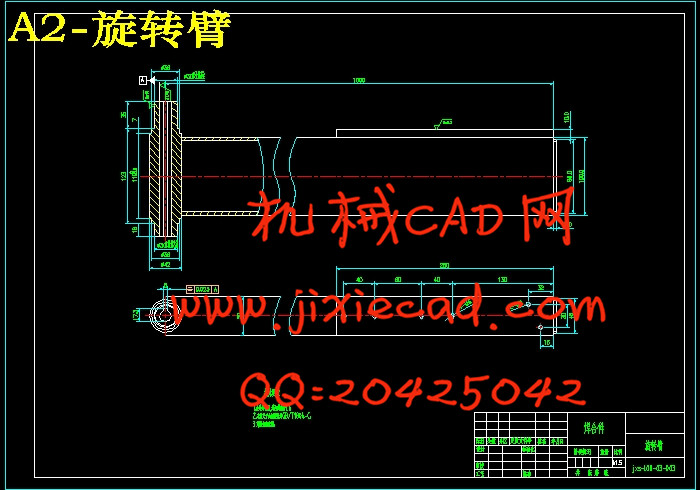
本次设计通过查阅互联网,收集资料,根据任务书要求设计一款用于自动抓取并完成螺栓装配的机械手的结构设计。设计中机械手的结构确定了选用直角坐标式和圆柱坐标式结合的方案,整个机械手确定为4自由度,机械手的驱动方式采用步进电机与同步带驱动及丝杠机构实现其移动及升降运动,采用回转气缸实现机械手臂的回转运行,采用旋转气缸实现手腕对螺栓的拧紧。并对机械手的零部件等机构进行了设计。
该设计最大的特点是能够在短时间内完成螺栓的装配,提高效率,减少生产时间,无需休息,在适宜的条件下可以连续工作。机械手可以实现对在恶劣的工况条件下取代人类,减轻劳动强度,从而减少安全事故的发生。
关键词:螺栓装配;机械手;步进电机;丝杠机构
本次的设计是螺栓装配机械手的结构设计,螺栓装配机械手作为工业机械手中的重要研究对象,已广泛应用于工业装配线中,有效地完成了零部件的装配,高精度电子产品及其部件的组装,可以代替人类完成一些繁琐的工作。
本次设计通过查阅互联网,收集资料,根据任务书要求设计一款用于自动抓取并完成螺栓装配的机械手的结构设计。设计中机械手的结构确定了选用直角坐标式和圆柱坐标式结合的方案,整个机械手确定为4自由度,机械手的驱动方式采用步进电机与同步带驱动及丝杠机构实现其移动及升降运动,采用回转气缸实现机械手臂的回转运行,采用旋转气缸实现手腕对螺栓的拧紧。并对机械手的零部件等机构进行了设计。
该设计最大的特点是能够在短时间内完成螺栓的装配,提高效率,减少生产时间,无需休息,在适宜的条件下可以连续工作。机械手可以实现对在恶劣的工况条件下取代人类,减轻劳动强度,从而减少安全事故的发生。
关键词:螺栓装配;机械手;步进电机;丝杠机构
ABSTRACT
This design is the structural design of the bolt assembly manipulator. The bolt assembly manipulator, as an important research object in the hands of industrial machinery, has been widely used in the industrial assembly line, effectively completed the assembly of components, the assembly of high precision electronic products and their components, and can replace some of the tedious work in place of human beings.
This design is designed by consulting the Internet, collecting data, and designing a mechanical hand for automatic grasping and completing the bolt assembly according to the requirements of the task book. The structure of the manipulator in the design determines the combination of rectangular coordinates and cylindrical coordinates. The whole manipulator is determined to be 4 degrees of freedom. The driving mode of the manipulator adopts the step motor and the synchronous belt drive and the screw mechanism to realize its movement and lifting movement, and the rotary cylinder is used to realize the rotary operation of the mechanical arm.The rotary cylinder is used to realize the tightening of the wrist to the bolt.It also designs the parts and components of the manipulator.
The main feature of the design is that it can complete the assembly of bolts in a short time, improve the efficiency, reduce the production time, without rest, and can work continuously under the suitable conditions. The manipulator can replace human beings under severe working conditions and reduce labor intensity, thereby reducing safety accidents.
Key Words:Bolt Assemble;Manipulator ;Stepper Motor;Screw Mechanism
This design is the structural design of the bolt assembly manipulator. The bolt assembly manipulator, as an important research object in the hands of industrial machinery, has been widely used in the industrial assembly line, effectively completed the assembly of components, the assembly of high precision electronic products and their components, and can replace some of the tedious work in place of human beings.
This design is designed by consulting the Internet, collecting data, and designing a mechanical hand for automatic grasping and completing the bolt assembly according to the requirements of the task book. The structure of the manipulator in the design determines the combination of rectangular coordinates and cylindrical coordinates. The whole manipulator is determined to be 4 degrees of freedom. The driving mode of the manipulator adopts the step motor and the synchronous belt drive and the screw mechanism to realize its movement and lifting movement, and the rotary cylinder is used to realize the rotary operation of the mechanical arm.The rotary cylinder is used to realize the tightening of the wrist to the bolt.It also designs the parts and components of the manipulator.
The main feature of the design is that it can complete the assembly of bolts in a short time, improve the efficiency, reduce the production time, without rest, and can work continuously under the suitable conditions. The manipulator can replace human beings under severe working conditions and reduce labor intensity, thereby reducing safety accidents.
Key Words:Bolt Assemble;Manipulator ;Stepper Motor;Screw Mechanism
目录
摘 要 I
ABSTRACT II
1 绪论 1
1.1 本课题研究的背景及意义 1
1.2 机械手的结构组成及分类 1
1.3 装配机械手的研究的概况和发展趋势 2
1.4 本文主要研究内容 3
2 螺栓装配机械手的总体方案的设计 4
2.1 机械手的功能要求 4
2.2 机器手的总体运动过程 4
2.3 各运动的传动方案设计 5
3 机械手的横向(X轴)移动机构设计 6
3.1 X轴运行机构方案设计 6
3.2 电机功率计算与选型 6
3.3 同步带的计算与选型 8
3.4 导轨的计算与选型 11
4 机械手的立柱及转臂机构设计 16
4.1 立柱机构方案设计 16
4.2 丝杠机构的设计计算 17
4.3 旋转手臂的设计 22
5 手腕及手爪设计 26
5.1 腕部的设计要求 26
5.2 腕部的结构 26
5.3 腕部的计算 27
5.4 手部结构技术要求 30
6 结 论 33
参 考 文 献 34
致 谢 44