设计简介
摘 要
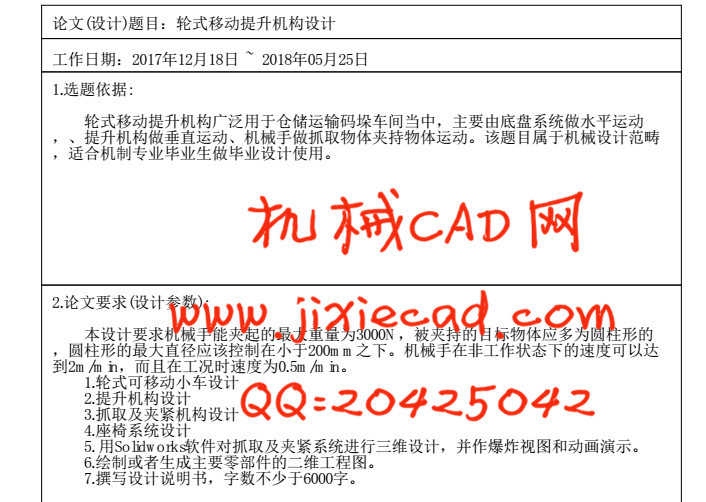
随着现代工业的快速发展,以互联网为媒介向四周扩散的贸易模式逐渐成为主流形式,正因为互联网行业的快速发展,也促使了周边产业的进步。其中离我们最近的一个产业当属物流行业。以往物流行业只针对于大型货品的长途运输,但是自从有了新的商业模式,物流行业新加了小产品;近距离;快速等属性。本次我们课题做的设备是针对于物流的仓储分拣环节而做的专用设备。移动提升机构能够很大程度上的提高分拣的工作效率,增加分拣的精确度,更重要的一点是能够节省劳动力,从而节约很大一部分成本进而增加经济效益。随着物流市场需求的日益增大以及仓储环节对于工作效率的要求逐渐提高,我们的设备发展前景一片光明。
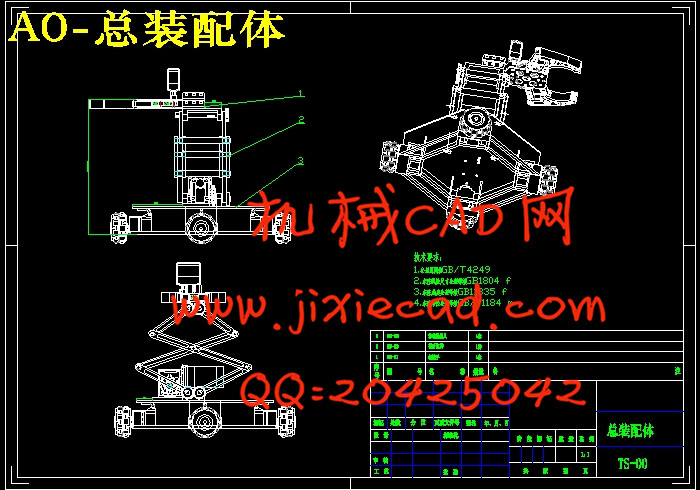
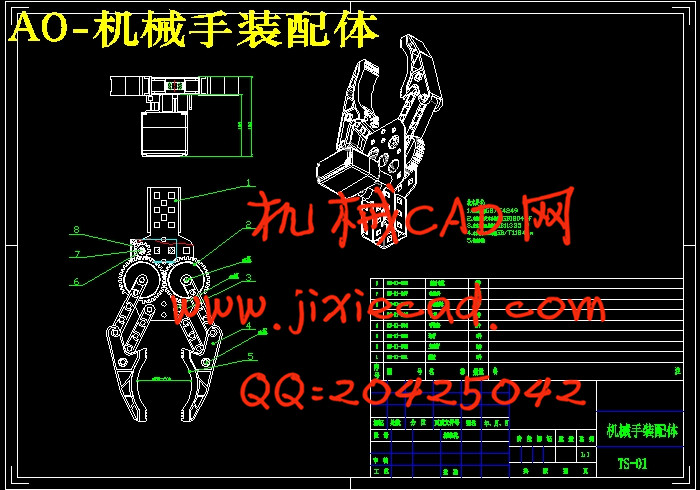
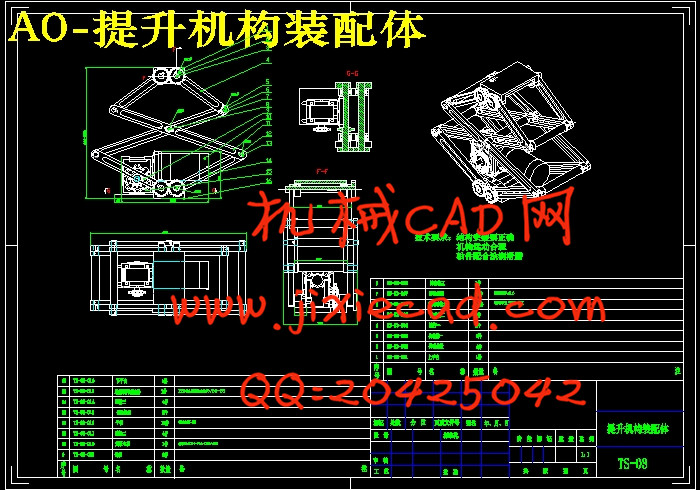
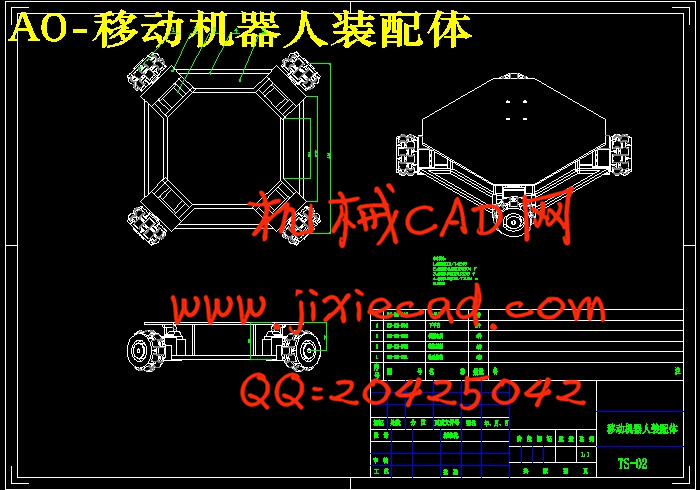
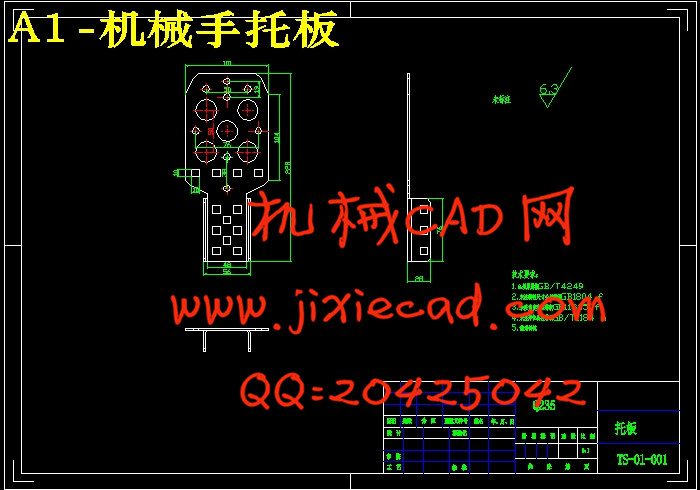
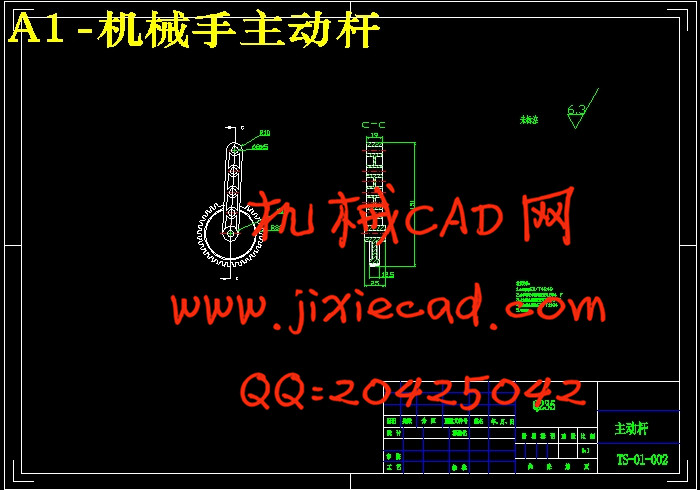
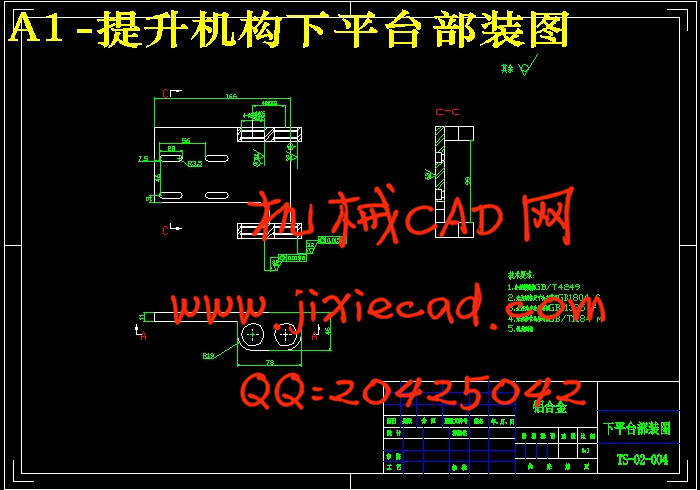
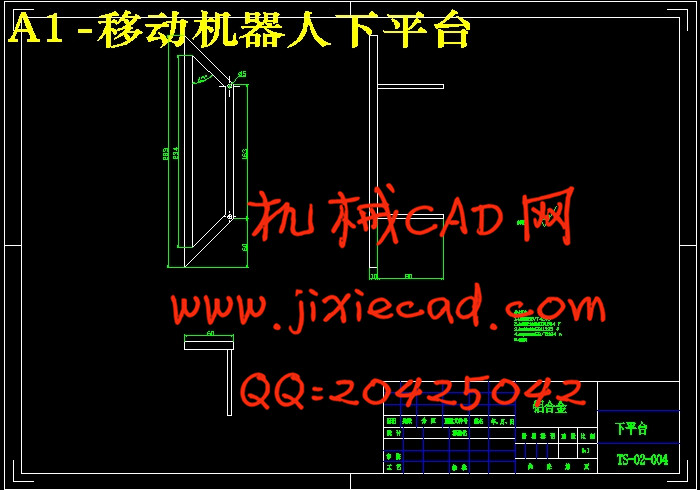
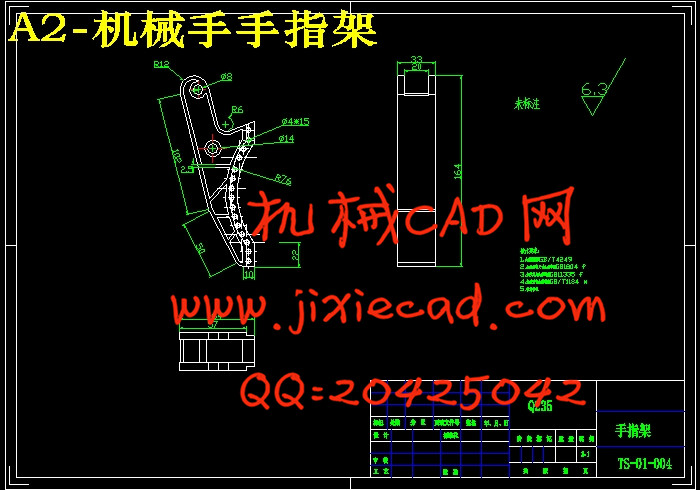
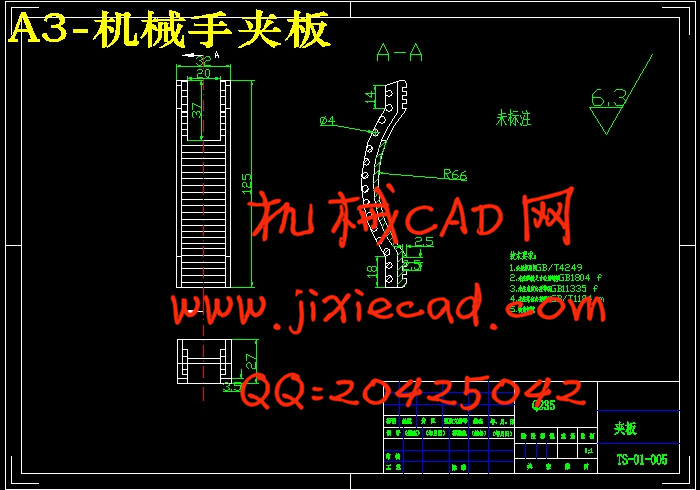
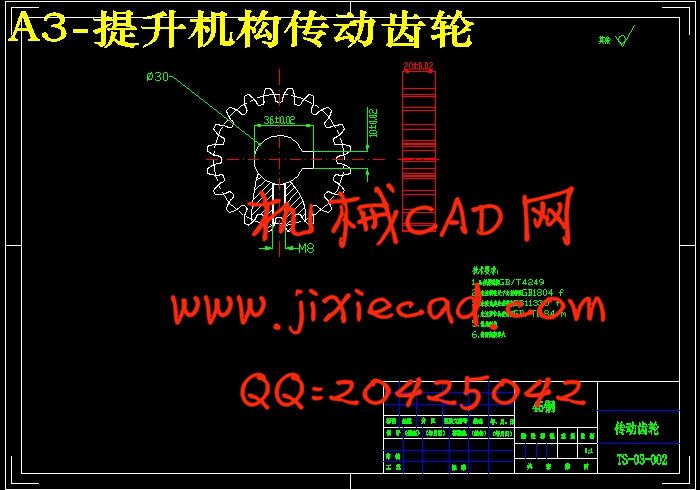
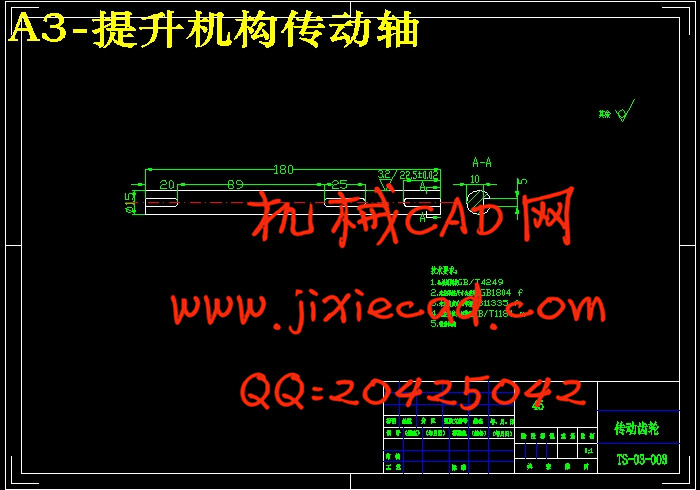
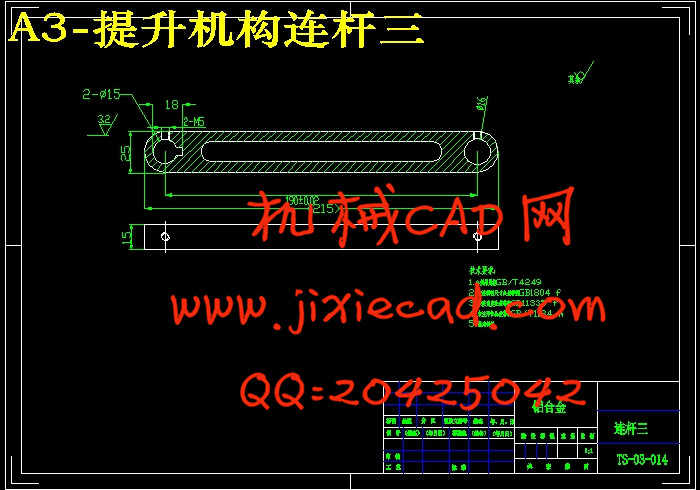
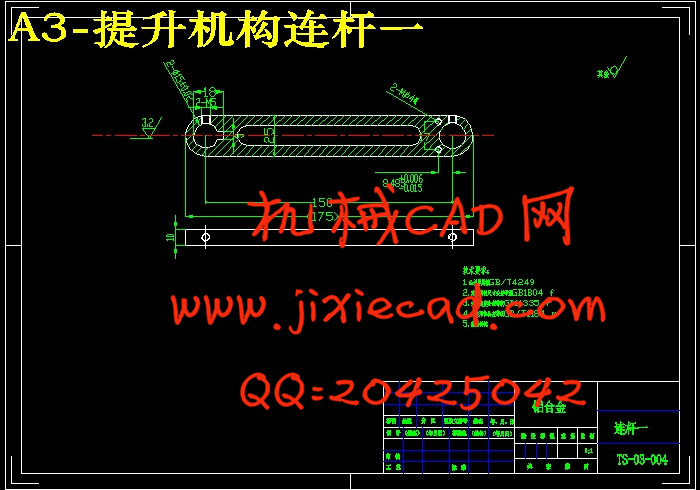
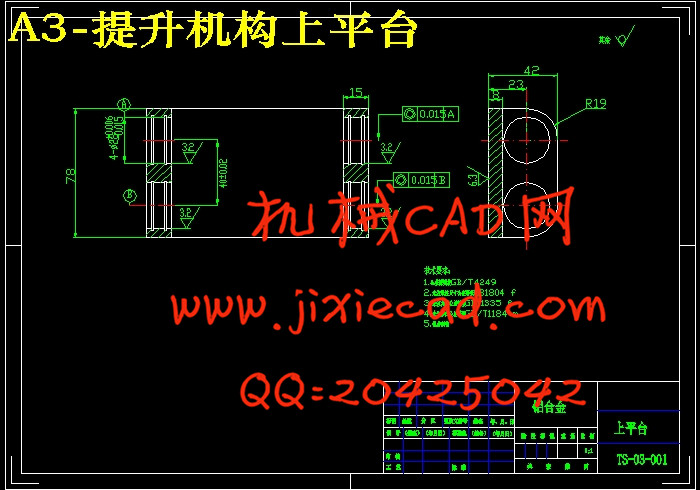
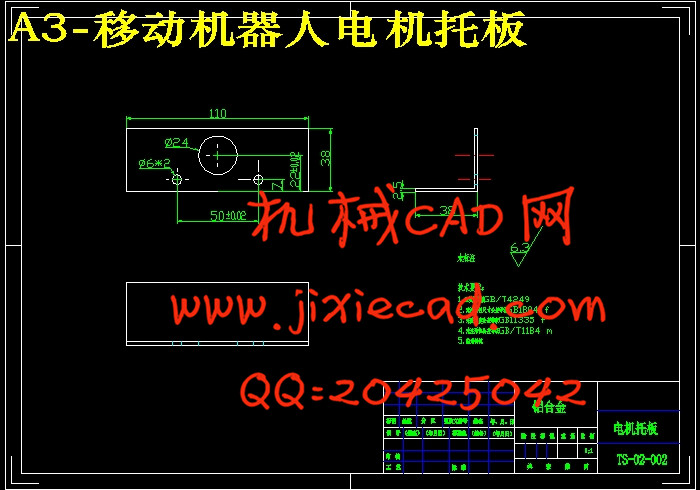
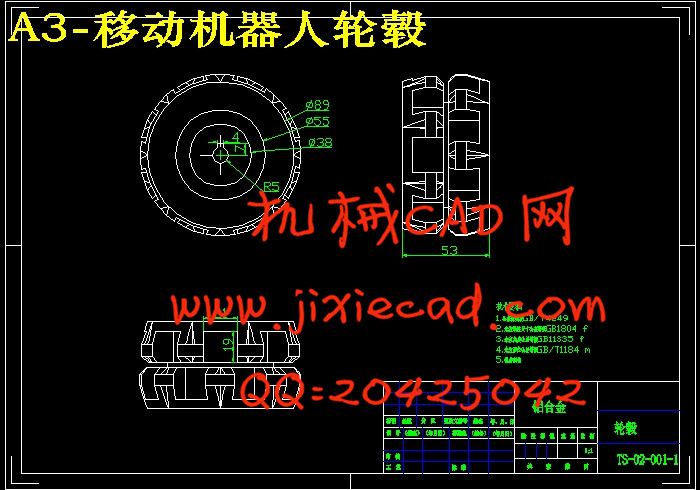
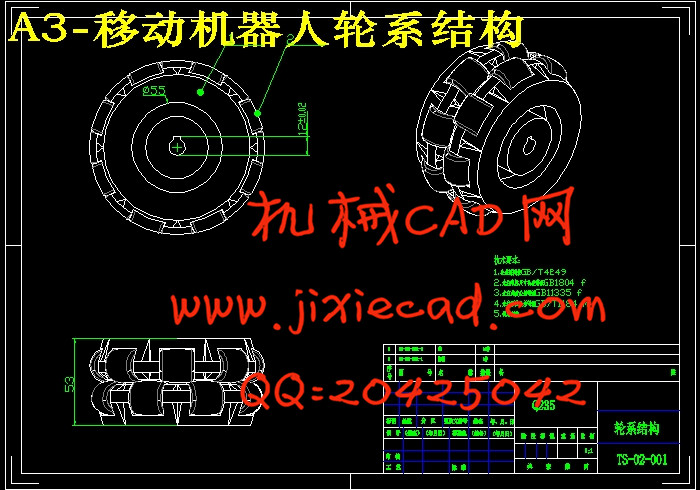
本文设计提升空间 1 米,可夹持 5 千克重物自由移动的设备。主要的设计内容是:轮式移动机器人;提升机构;机械手夹紧机构。轮式移动机器人是设备的根基部分,由直流伺服电机提供动力源带动一组(4 个)麦克纳姆万向轮转动,通过控制实现车体的前进;后退;旋转等运动。配备承载平台,安装提升机构。提升机构为设备的主体部分,同样以伺服电机为动力源带动剪叉机构实现上升与下降,同时应配备蜗轮蜗杆减速器以达到自锁的目的。机械机构作为设备的执行部件,通过齿轮带动手指关节的张开与闭合实现对物品的抓取和放置动作。
论文通过三维建模与理论计算对设备进行功能介绍与校核验算。
关键词:仓储机器人;移动机器人;提升机构
随着现代工业的快速发展,以互联网为媒介向四周扩散的贸易模式逐渐成为主流形式,正因为互联网行业的快速发展,也促使了周边产业的进步。其中离我们最近的一个产业当属物流行业。以往物流行业只针对于大型货品的长途运输,但是自从有了新的商业模式,物流行业新加了小产品;近距离;快速等属性。本次我们课题做的设备是针对于物流的仓储分拣环节而做的专用设备。移动提升机构能够很大程度上的提高分拣的工作效率,增加分拣的精确度,更重要的一点是能够节省劳动力,从而节约很大一部分成本进而增加经济效益。随着物流市场需求的日益增大以及仓储环节对于工作效率的要求逐渐提高,我们的设备发展前景一片光明。
本文设计提升空间 1 米,可夹持 5 千克重物自由移动的设备。主要的设计内容是:轮式移动机器人;提升机构;机械手夹紧机构。轮式移动机器人是设备的根基部分,由直流伺服电机提供动力源带动一组(4 个)麦克纳姆万向轮转动,通过控制实现车体的前进;后退;旋转等运动。配备承载平台,安装提升机构。提升机构为设备的主体部分,同样以伺服电机为动力源带动剪叉机构实现上升与下降,同时应配备蜗轮蜗杆减速器以达到自锁的目的。机械机构作为设备的执行部件,通过齿轮带动手指关节的张开与闭合实现对物品的抓取和放置动作。
论文通过三维建模与理论计算对设备进行功能介绍与校核验算。
关键词:仓储机器人;移动机器人;提升机构
ABSTRACT
In modern industrial production, the welding manipulator can not only reduce the labor intensity of workers, reduce the time needed for welding, but also ensure the quality of welding seam. The use of the welding machine will greatly reduce the labor load. In the premise of guaranteeing the quality of the product, it can also greatly increase the output, which will bring great economic benefits to the company. In order to adapt to the development of modern industry, higher production efficiency is needed. Therefore, it is important to study the welding machine to overcome the previous manual welding, such as high labor intensity, low production quality, low labor efficiency, poor production conditions and so on. It is of great significance to improve the production efficiency and ensure the quality of the important pipeline welding. It has good development prospects and social benefits.
This paper designs a 3 meter telescopic welding machine. The main design contents are the walking trolley mechanism, the locking mechanism and the locking principle, and the structure design of the vertical column rotary mechanism. The trolley is mainly composed of a car body, a driven wheel and a driving wheel, and is driven by a two direct connection motor through a reducer to drive the driving wheel. The locking mechanism is mainly composed of a locking guide rail and a locking nut, wherein the trapezoidal nut and the trapezoidal screw are transformed into a motion form to achieve the purpose of locking. The rotary mechanism is mainly composed of rotary bearing and driving gear. According to the rational design of structure and function, the cross roller bearing with outer teeth is chosen to carry large axial and radial force, and the purpose of turning is achieved. The speed of rotation is realized by the reducer and the transmission ratio of the small gear.
The whole structure function of each part is explained by 3D modeling.
Key words: storage robot; mobile robot; lifting mechanism