设计简介
机器人既有人对环境的快速反应和分析判断能力,又有机器可长时间持续工作、精确度高、抗恶劣环境的能力,从某种意义上说它是机器的进化过程产物,它是工业以及非产业界的重要生产和服务性设备,也是先进制造技术领域不可缺少的自动化设备。如今,机器人工业已成为世界各国备受关注的产业。
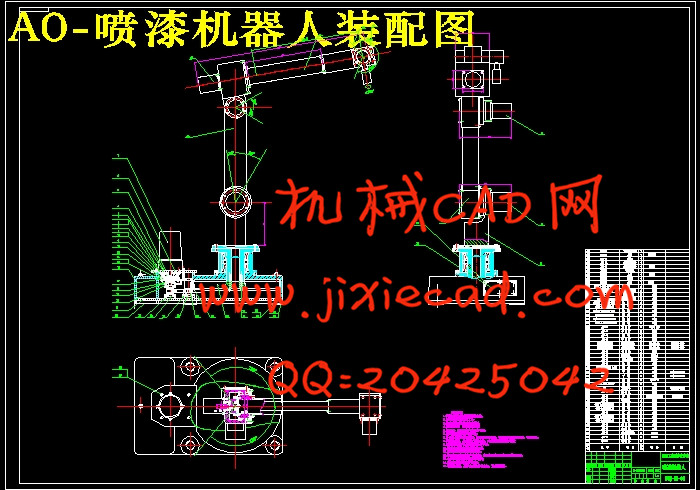
本课题设计的喷漆机器人的小臂系统设计,介绍了机器人的结构组成,确定了基本技术参数,驱动系统,手臂配置形式,电动机的选择,小臂部件的结构设计及计算绘图以及减速器的造型等等方面内容来完成此次设计。
关键词: 机器人;工业;传动;小臂,设计
Robot as a man on the environment of rapid response and analytical skills, and the machine can work continuously for long time, high accuracy, anti adverse circumstance ability, in the sense that it is the product of the evolution of the machine, it is an important production and industrial and non industrial sector, service equipment, automation equipment and field advanced manufacturing technology, an indispensable. Now, the robot industry around the world has become the concern of the industry.
Design of small arms system designed in this thesis, the painting robot, the robot structure, the basic technical parameters, the drive system, the arm configuration, the choice of motor, small arms parts of the structure design and calculation of drawing and the other on the face side down to complete this design.
Keywords :Robot; Industrial; Transmission; Small arm, Design
目 录
1 绪论 1
1.1 机器人概念 1
1.2 课题研究的背景和意义 2
1.3 国内机器人的研究 3
1.4机器人的组成 3
1.4.1执行机构 3
1.4.2驱动机构 3
1.4.3控制机构 4
1.5喷漆机器人 4
1.6 本课题研究内容 4
2 机器人总体设计 5
2.1 确定基本技术参数 5
2.1.1 机械结构类型的选择 5
2.1.2 额定负载 6
2.1.3 工作范围 6
2.1.4 操作机的驱动系统设计 6
2.1.5 控制系统选择 7
2.1.6 确定机器人手臂的配置形式 7
2.2 机器人臂材料选择 8
2.3 喷漆机器人工作空间的计算 9
3 喷涂机器人小臂结构设计 11
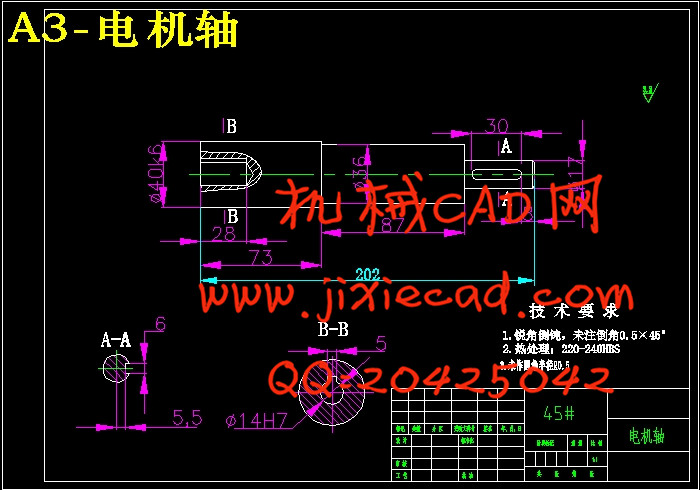
3.1 电动机的选择 11
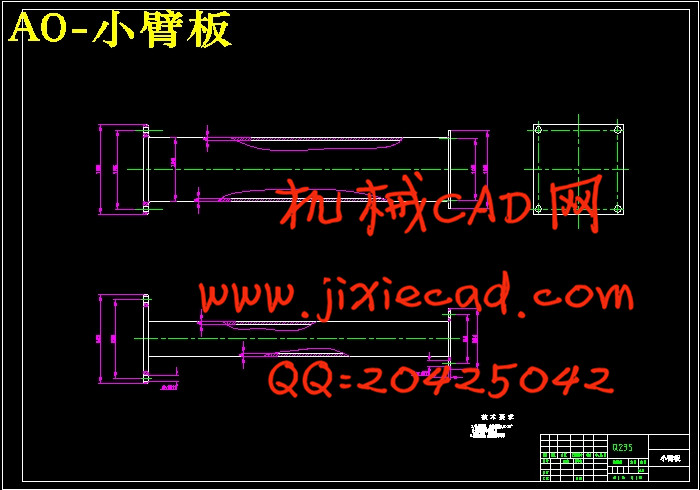
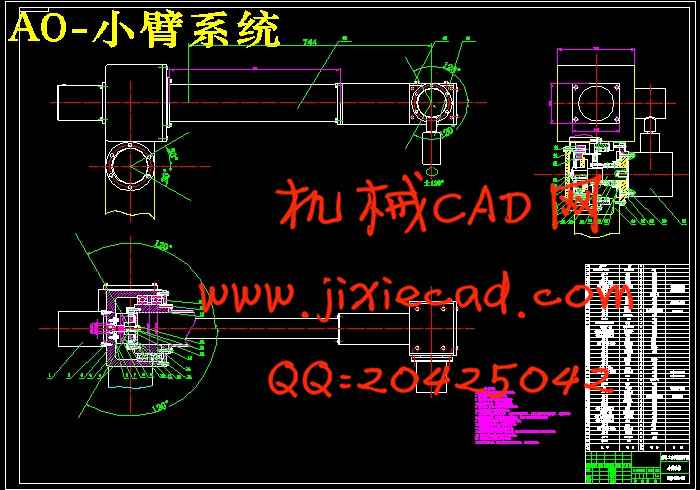
3.2 小臂部结构设计 12
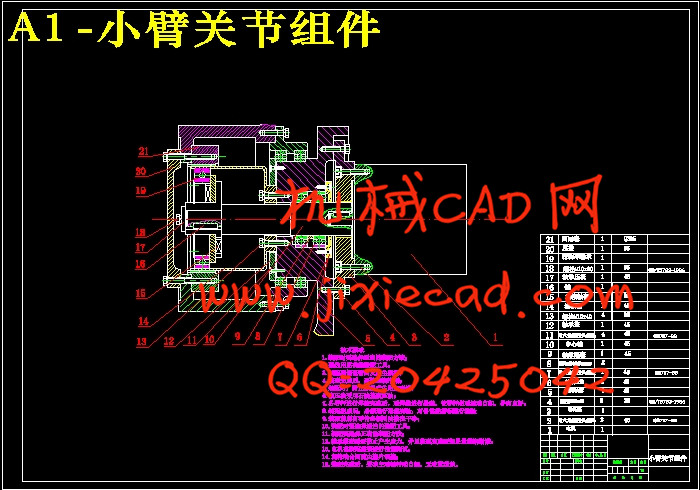
3.3 小臂电机及减速器选型 13
3.3.1.传动结构形式的选择 14
3.3.2.几何参数的计算 14
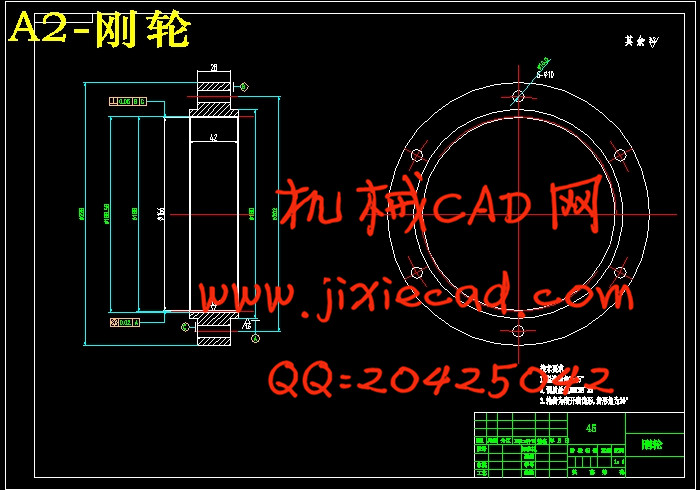
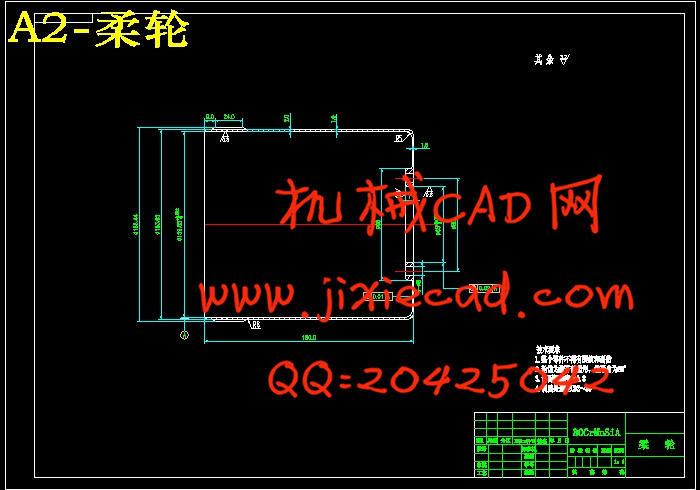
3.4 凸轮波发生器及其薄壁轴承的计算 15
3.4.1柔轮齿面的接触强度的计算 16
3.4.2柔轮疲劳强度的计算 17
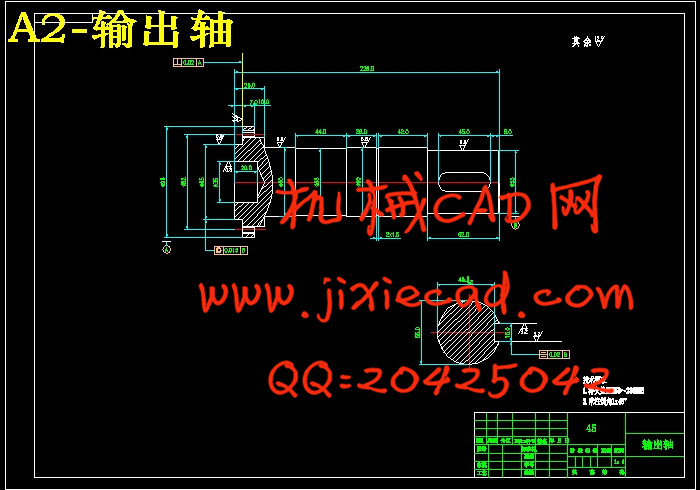
3.5 轴结构尺寸设计 18
3.6 轴的受力分析及计算 19
3.7 轴承的寿命校核 20
总 结 22
参考文献 23
致 谢 24
本课题设计的喷漆机器人的小臂系统设计,介绍了机器人的结构组成,确定了基本技术参数,驱动系统,手臂配置形式,电动机的选择,小臂部件的结构设计及计算绘图以及减速器的造型等等方面内容来完成此次设计。
关键词: 机器人;工业;传动;小臂,设计
Robot as a man on the environment of rapid response and analytical skills, and the machine can work continuously for long time, high accuracy, anti adverse circumstance ability, in the sense that it is the product of the evolution of the machine, it is an important production and industrial and non industrial sector, service equipment, automation equipment and field advanced manufacturing technology, an indispensable. Now, the robot industry around the world has become the concern of the industry.
Design of small arms system designed in this thesis, the painting robot, the robot structure, the basic technical parameters, the drive system, the arm configuration, the choice of motor, small arms parts of the structure design and calculation of drawing and the other on the face side down to complete this design.
Keywords :Robot; Industrial; Transmission; Small arm, Design
目 录
1 绪论 1
1.1 机器人概念 1
1.2 课题研究的背景和意义 2
1.3 国内机器人的研究 3
1.4机器人的组成 3
1.4.1执行机构 3
1.4.2驱动机构 3
1.4.3控制机构 4
1.5喷漆机器人 4
1.6 本课题研究内容 4
2 机器人总体设计 5
2.1 确定基本技术参数 5
2.1.1 机械结构类型的选择 5
2.1.2 额定负载 6
2.1.3 工作范围 6
2.1.4 操作机的驱动系统设计 6
2.1.5 控制系统选择 7
2.1.6 确定机器人手臂的配置形式 7
2.2 机器人臂材料选择 8
2.3 喷漆机器人工作空间的计算 9
3 喷涂机器人小臂结构设计 11
3.1 电动机的选择 11
3.2 小臂部结构设计 12
3.3 小臂电机及减速器选型 13
3.3.1.传动结构形式的选择 14
3.3.2.几何参数的计算 14
3.4 凸轮波发生器及其薄壁轴承的计算 15
3.4.1柔轮齿面的接触强度的计算 16
3.4.2柔轮疲劳强度的计算 17
3.5 轴结构尺寸设计 18
3.6 轴的受力分析及计算 19
3.7 轴承的寿命校核 20
总 结 22
参考文献 23
致 谢 24