设计简介
机器人是一种典型的机电一体化产品,喷漆机器人是机器人研究领域的热点。研究喷漆机器人需要结合机械、电子、信息论、人工智能、生物学以及计算机等诸多学科知识,同时其自身的发展也促进了这些学科的发展。
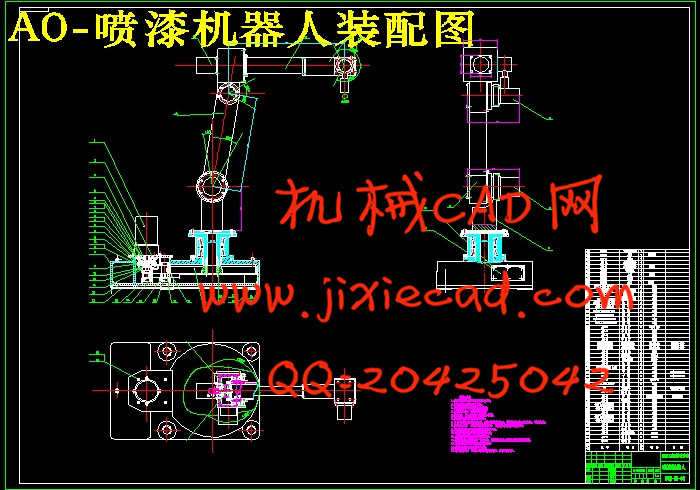
本文对一种使用在喷漆机器人的大臂结构进行设计,并完成总装配图和零件图的绘制。要求对机器人模型进行力学分析,估算各关节所需转矩和功率,完成电机和减速器的选型。其次从电机和减速器的连接和固定出发,设计关节结构,并对机构中的重要连接件进行强度校核。
关键词: 结构设计,机器臂,关节型机器人,结构分析
Abstract
The robot is a typical mechatronic products, spray painting robot is a hot research field of the robot. Study on the spray painting robot requires a combination of mechanical, electronic, information theory, artificial intelligence, biology and computer science knowledge, at the same time, its development has promoted the development of these disciplines.
In this paper, a design of arm structure used in the painting robot, and complete the general assembly drawing and part drawing. Requirements for the mechanics analysis of the robot model, estimate required on each joint torque and power, complete motor and reducer selection. Secondly, from the motor and reducer connection and fixation of joint structure, design, and the mechanism of important connections check the strength.
Keywords :Structure design, Robot arm, Structure analysis
目 录
1 绪论 1
1.1 引言 1
1.2 机器人的发展及技术 2
1.2.1 机器人的发展 2
1.2.2 机器人技术 2
1.3 喷漆机器人研究概况 3
1.3.1 国外研究现状 3
1.3.2 国内研究现状 4
1.4 喷涂机器人的总体结构 5
1.5 主要内容 5
2 总体方案设计 6
2.1 机器人工程概述 6
2.2 工业机器人总体设计方案论述 7
2.3 机器人机械传动原理 8
2.4 机器人总体方案设计 8
2.5 喷漆机器人工作空间的计算 10
2.6 本章小结 11
3 机器人大臂部结构 11
3.1 大臂部结构设计的基本要求 11
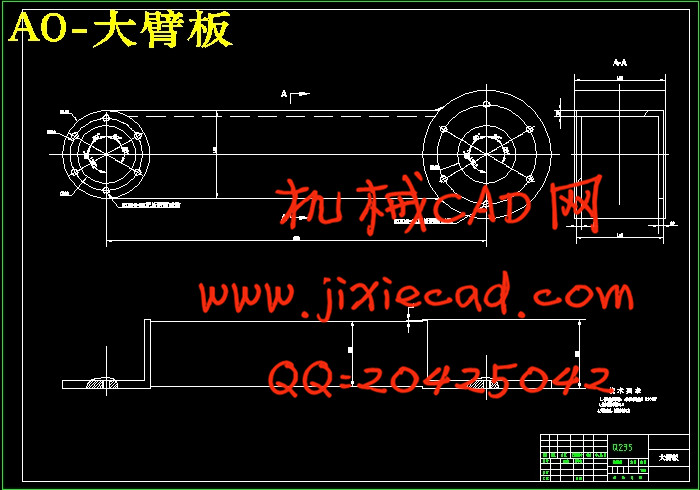
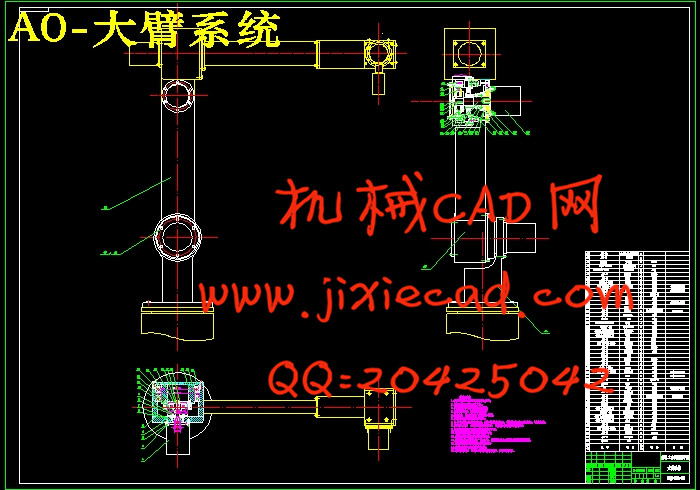
3.2 大臂部结构设计 12
3.3 大臂电机及减速器选型 13
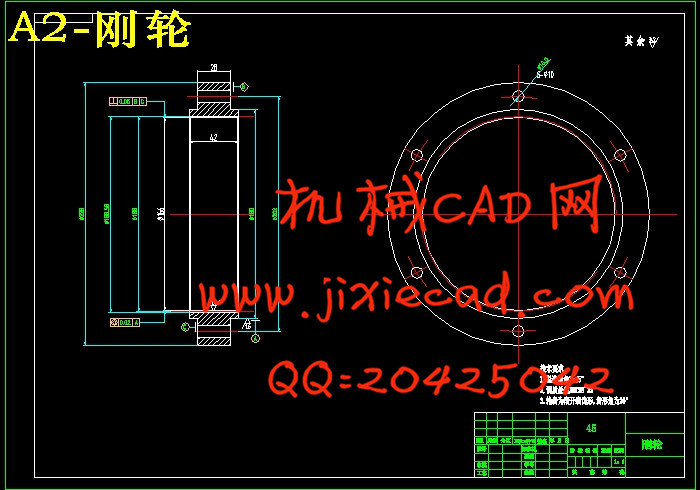
3.4 减速器参数的计算 14
3.5承载能力的计算 18
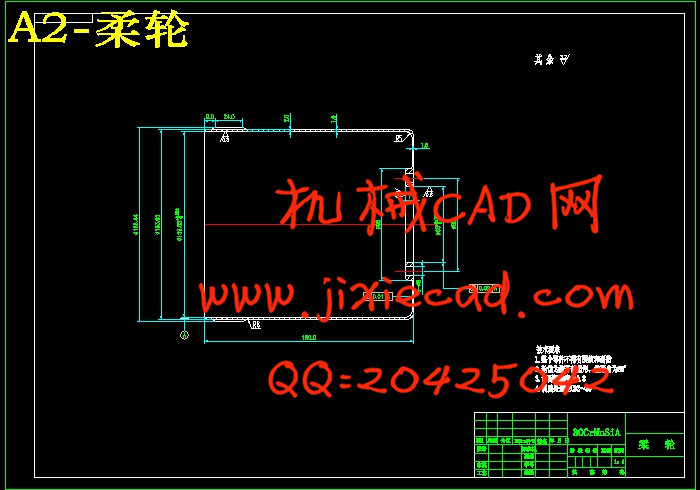
3.5.1 柔轮齿面的接触强度的计算 18
3.5.2 柔轮疲劳强度的计算 18
总结与展望 23
致 谢 24
参 考 文 献 25
本文对一种使用在喷漆机器人的大臂结构进行设计,并完成总装配图和零件图的绘制。要求对机器人模型进行力学分析,估算各关节所需转矩和功率,完成电机和减速器的选型。其次从电机和减速器的连接和固定出发,设计关节结构,并对机构中的重要连接件进行强度校核。
关键词: 结构设计,机器臂,关节型机器人,结构分析
Abstract
The robot is a typical mechatronic products, spray painting robot is a hot research field of the robot. Study on the spray painting robot requires a combination of mechanical, electronic, information theory, artificial intelligence, biology and computer science knowledge, at the same time, its development has promoted the development of these disciplines.
In this paper, a design of arm structure used in the painting robot, and complete the general assembly drawing and part drawing. Requirements for the mechanics analysis of the robot model, estimate required on each joint torque and power, complete motor and reducer selection. Secondly, from the motor and reducer connection and fixation of joint structure, design, and the mechanism of important connections check the strength.
Keywords :Structure design, Robot arm, Structure analysis
目 录
1 绪论 1
1.1 引言 1
1.2 机器人的发展及技术 2
1.2.1 机器人的发展 2
1.2.2 机器人技术 2
1.3 喷漆机器人研究概况 3
1.3.1 国外研究现状 3
1.3.2 国内研究现状 4
1.4 喷涂机器人的总体结构 5
1.5 主要内容 5
2 总体方案设计 6
2.1 机器人工程概述 6
2.2 工业机器人总体设计方案论述 7
2.3 机器人机械传动原理 8
2.4 机器人总体方案设计 8
2.5 喷漆机器人工作空间的计算 10
2.6 本章小结 11
3 机器人大臂部结构 11
3.1 大臂部结构设计的基本要求 11
3.2 大臂部结构设计 12
3.3 大臂电机及减速器选型 13
3.4 减速器参数的计算 14
3.5承载能力的计算 18
3.5.1 柔轮齿面的接触强度的计算 18
3.5.2 柔轮疲劳强度的计算 18
总结与展望 23
致 谢 24
参 考 文 献 25