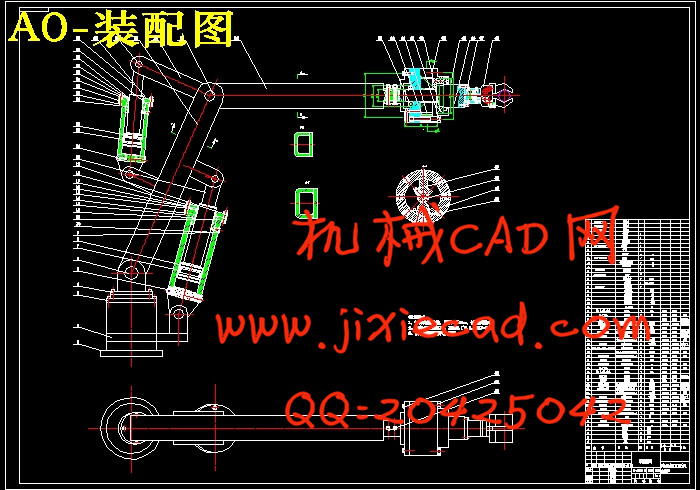
设计简介
坐标形式:球坐标
| 坐标系 | 抓重 | 自由度 | 伸缩X | 升降Z |
| 球坐标 | 250N | 4 | 350mm,<300mm/s | 150mm,<300mm/s |
| 横移Y | 回转φ | 俯仰θ | 小臂俯仰θ2 |
| 250mm,<300mm/s | 0°~210°,<90°/s |
0°~45°,<90°/s |
|
| 回转ω | 手指夹持范围 |
| 0°~180°,<90°/s | 棒料,直径φ40~φ60,长度450~1200mm |
摘 要机械手是在在机械化、自动化生产过程中发展的一种新型装置,使用的一种具有抓取和移动工件功能的自动化装置。机械手能代替人类、重复枯燥完成危险工作,提高劳动生产力,减轻人劳动强度。该装置涵盖了位置控制技术可编程控制技术、检测技术等。本课题拟开发的物料球坐标工业机械手可在空间抓放物体,动作灵活多样,根据工件的变化及运动流程的要求随时更改相关参数,可代替人工在高温危险区进行作业,。
关键词:机械手, 球坐标工业机械手,抓取,提升
Abstract
The manipulator is a new device developed in the mechanization, automation of production process, a grasping and moving the workpiece function of automation device use. The manipulator can repeat boring to do dangerous work instead of humans,, improve labor productivity, reduce labor intensity. The device covers the position control technology of programmable control technology, detection technology. The material of hydraulic manipulator this subject to the grasping be up in space objects, flexible, any changes to the relevant parameters according to the change and the movement flow requirements, but instead of manual operation in high risk areas,.Key Words: manipulator, hydraulic manipulator, crawl, enhance
目 录
摘 要 2Abstract 3
目 录 4
1 绪 论 7
1.1 课题背景及目的 7
1.2 机械手的定义 7
1.3 球坐标工业机械手的组成 7
1.4 球坐标工业机械手的应用 8
2 球坐标工业机械手设计要求与方案 9
2.1 球坐标工业机械手设计要求 9
2.2 基本设计思路 9
2.2.1 系统分析 9
2.2.2 总体设计框图 10
2.2.3 球坐标工业机械手的基本参数 10
2.3 球坐标工业机械手结构设计 11
2.4 机械手材料的选择 11
2.5机械臂的运动方式 12
2.6 球坐标工业机械手驱动方式的选择 12
2.7 动作要求分析 13
2.8 球坐标工业机械手结构及驱动系统选型 13
3 系统各主要组成部分设计 15
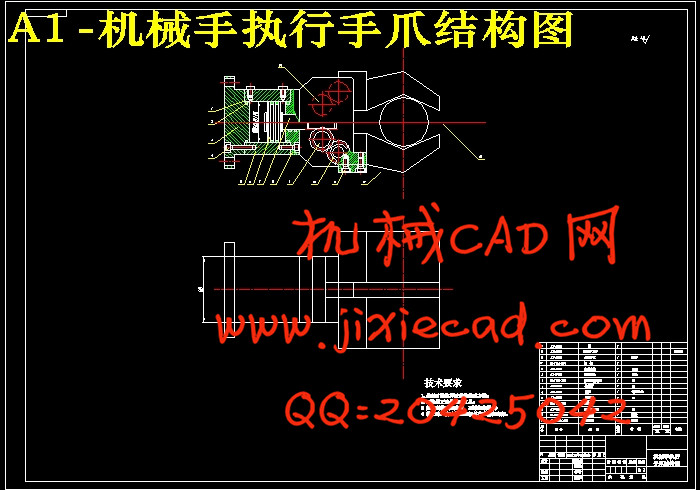
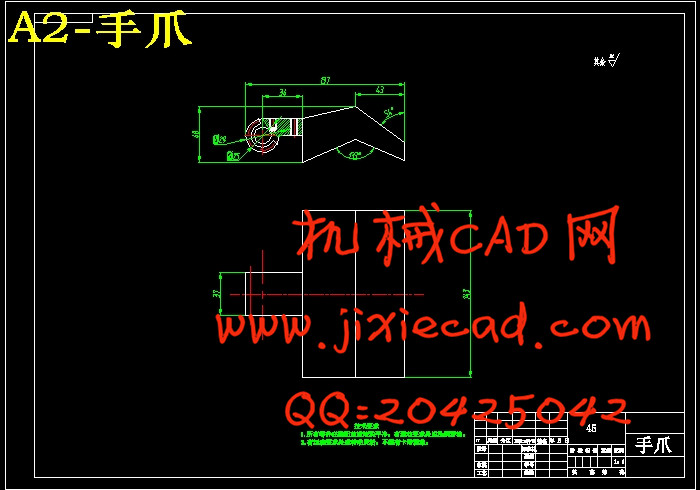
3.1夹持器结构设计与校核 15
3.1.1 夹持器种类 15
3.1.2 夹持器设计计算 16
3.1.3 夹持器校核 17
3.2 升降方向设计计算 17
3.2.1 初步确系统压力 17
3.2.2 升降油缸计算 18
3.2.3 活塞杆的计算校核 19
3.2.4 液压缸工作行程的确定 21
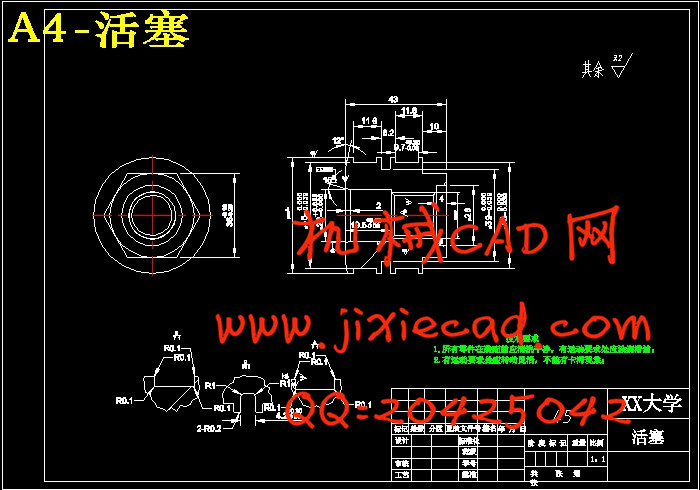
3.2.5 活塞的设计 21
3.2.6 导向套的设计与计算 21
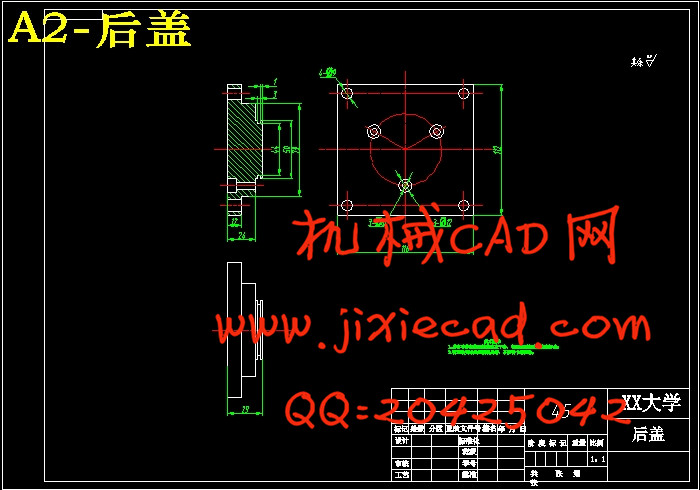
3.2.7 端盖和缸底的计算校核 22
3.2.7 缸体长度的确定 23
3.2.8 缓冲装置的设计 23
3.3 水平方向设计计算 23
3.3.1 水平方向计算 23
3.3.2 油缸的选型 24
3.4 底座回转机构设计计算 24
3.4.1 回转部位负载计算校核 24
3.4.2 油马达的选型 26
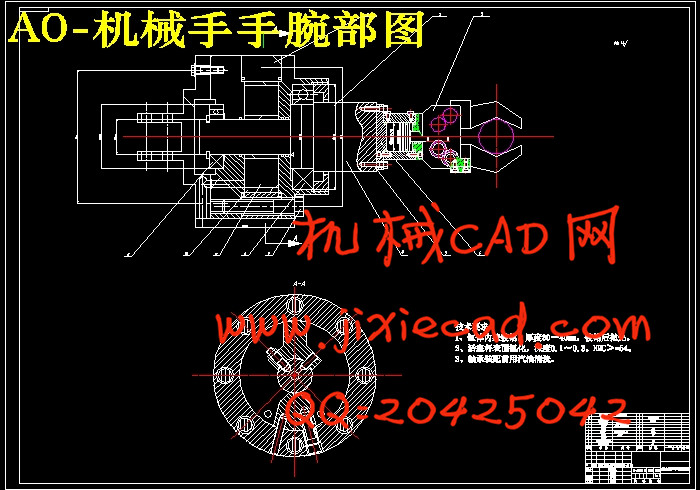
3.5机身结构的设计校核 27
3.5.1 油马达的选择 27
3.5.2螺柱的设计与校核 27
3.5.3机座的机械结构 29
3.6 球坐标工业机械手的定位及平稳性确定 29
3.6.1 常用的定位方式 29
3.6.2 影响平稳性和定位精度的因素 29
3.6.3 球坐标工业机械手运动的缓冲装置 30
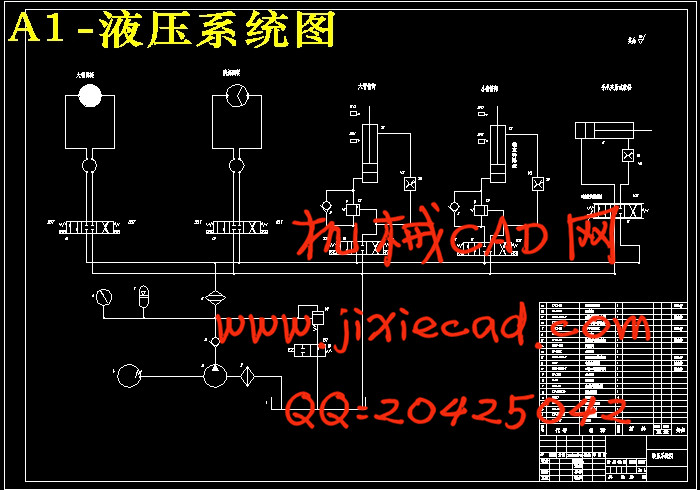
3.6.4 绘制液压系统图 31
3.6.5 计算和选择液压元件 32
3.6.6 液压系统性能的验算 33
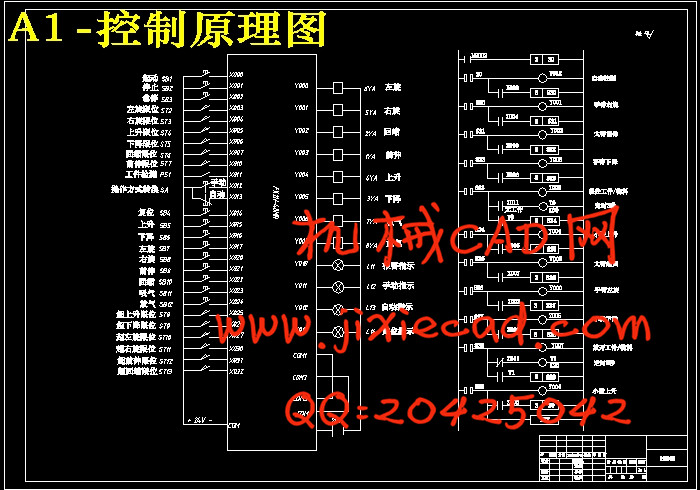
4 机械手控制系统设计 34
4.1 机械手的工艺过程 34
4.2 PLC 控制系统 35
4.3 PLC 控制系统程序设计 36
总结与展望 39
参考文献 40
致 谢 41