设计简介
摘 要
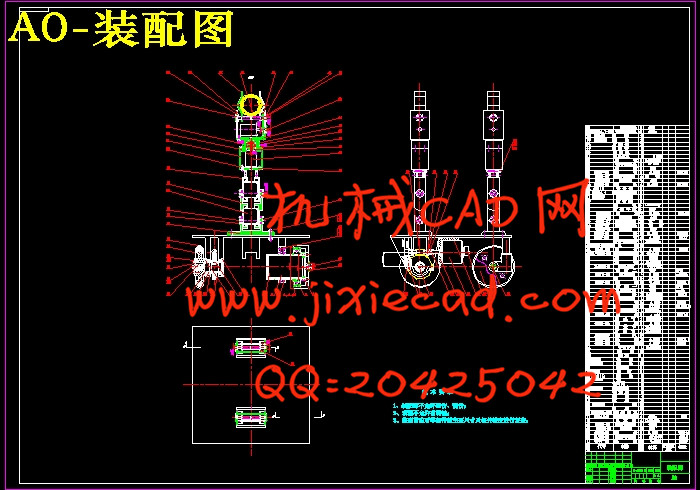
本文介绍的机器人发展历史,机器人在国内外的应用,提出了具体的机器人设计要求和总体方案设计的不同程度的具体结构设计,以及计算的自由度和各个数据;在分析了目前国内外智能移动机器人技术研究现状的基础上,本文提出了一种新的设计——L300MM智能小车。电机通过几个简单的驱动机构驱动,使机器人能够在一个方向的步态得以实现。在与车轮的运动相结合,机器人不仅具有一般的轮式机器人动作快,控制简单的功能,而且还具有良好的克服障碍功能。在本文中,对这种新型的移动机器人进行了分析。
本论文研究内容摘要:
(1) L300MM智能小车总体结构设计。
(2) L300MM智能小车工作性能分析。
(3)电动机的选择。
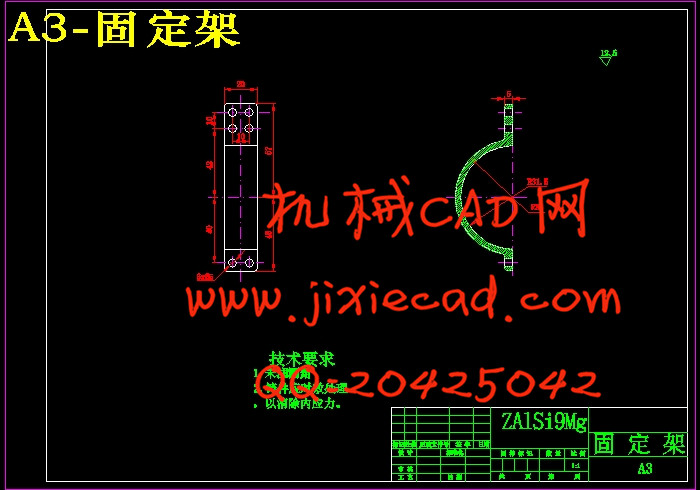
(4)对L300MM智能小车的传动系统、执行部件及机架设计。
(5)对设计零件进行设计计算分析和校核。
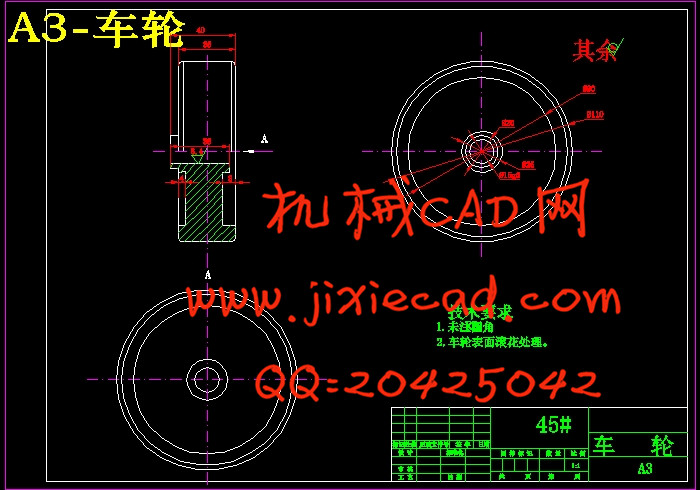
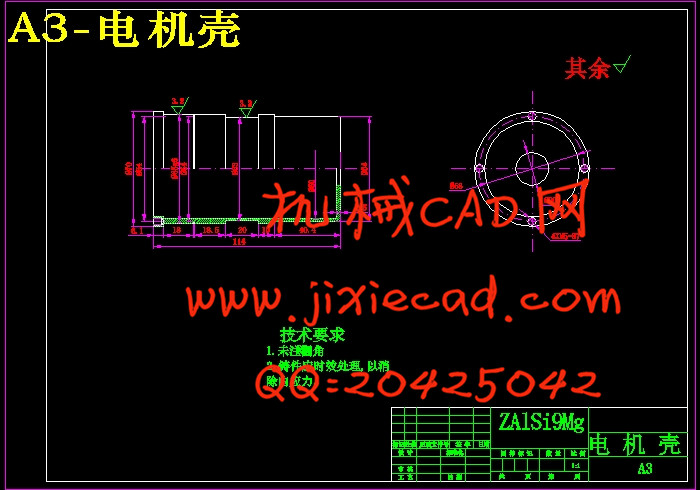
(6)运用计算机辅助设计,对设计的零件进行CAD绘图。
(7)绘制整机装配图及重要部件装配图和设计零件的零件图。
关键词:移动机器人,步态,工业机器人;传动装置 ;智能小车
Abstract
This paper introduces the history of the development of the robot, the application of robots at home and abroad, puts forward the design of robot specific design requirements and the overall scheme of the different levels of the specific design of the structure, and the calculation of the degrees of freedom and individual data;Based on the current domestic and foreign research status of the intelligent mobile robot, this paper puts forward a new design of L300MM intelligent vehicle. A driving mechanism for driving motor through a few simple, which can make the robot in a direction of the gait can be achieved. In combination with the motion of the wheels, wheel robot robot not only has the general fast, simple control function, but also has a good function to overcome the obstacles. In this paper, the new type mobile robot is analyzed.
Abstract this dissertation studies:
(1) L300MM smart car design.
(2) performance analysis of L300MM intelligent vehicle.
(3) the choice of motor.
(4) transmission system, execution unit and frame design of L300MM intelligent vehicle.
(5) the design of parts of the design calculation and check.
(6) the use of computer aided design, CAD drawing on the design of the parts.
(7) the assembly drawing and parts drawing assembly drawings and parts drawings design.
Keywords: mobile robot, gait, industrial robot; transmission device; smart car
目 录
摘 要 IAbstract II
目 录 IV
第1章 绪论 1
1.1 机器人概念 1
1.2 课题研究的背景和意义 1
1.3 国内机器人的研究 2
1.5机器人的发展及技术 5
1.5.1 机器人的发展 5
1.5.2 机器人技术 5
1.5.3 本课题研究的任务和要求 6
1.6 本文主要研究内容 6
第2章L300MM智能机器小车结构方案设计 7
2.1机器人工程概述 7
2.2 工业机器人车体机构方案论述 8
2.3 小型智能移动机器人车体结构机械传动原理 8
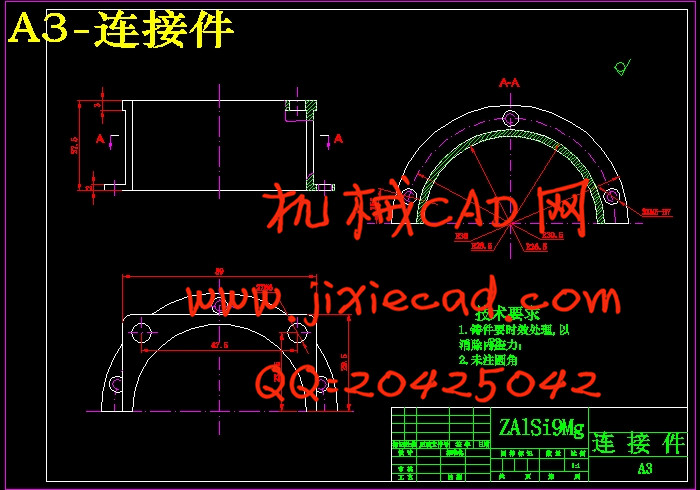
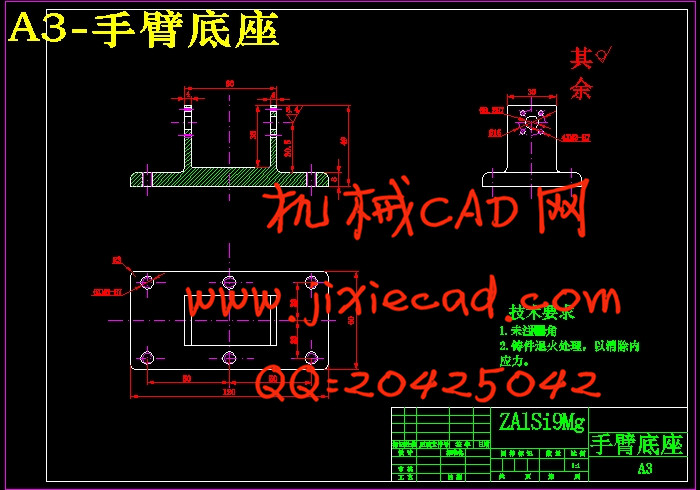
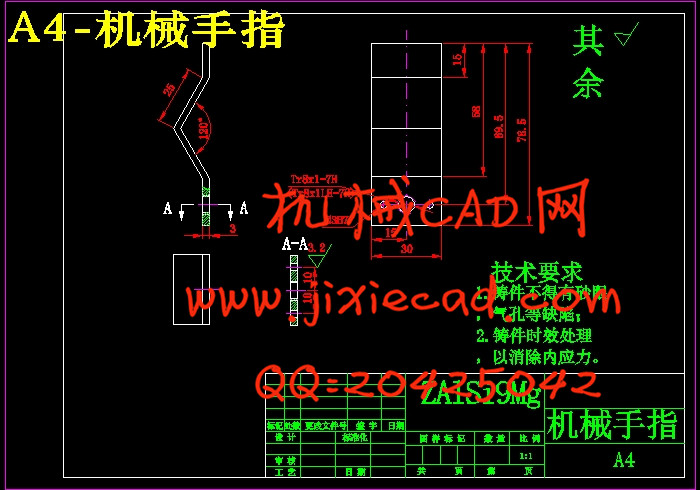
2.4 机械手的结构方案 10
第3章L300MM智能机器小车各部分设计 11
3.1 移动机器人车轮旋转机构设计 11
3.2 电机的选型与计算 12
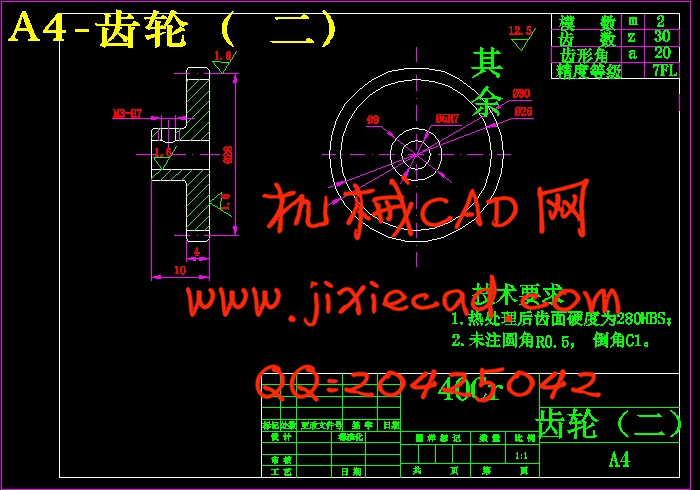
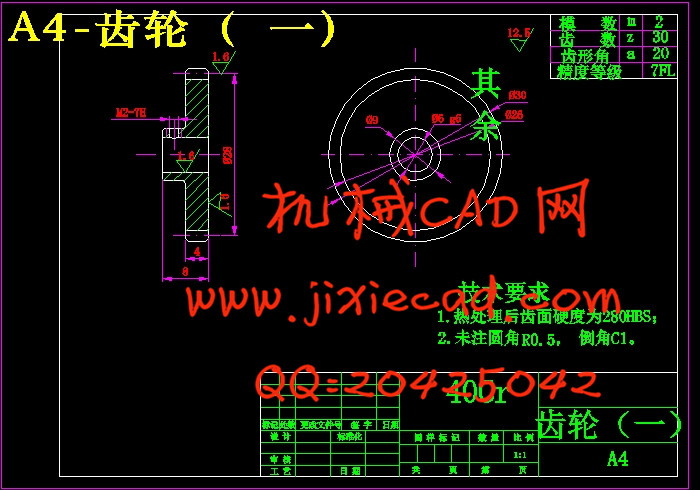
3.3 抓取机构的设计 14
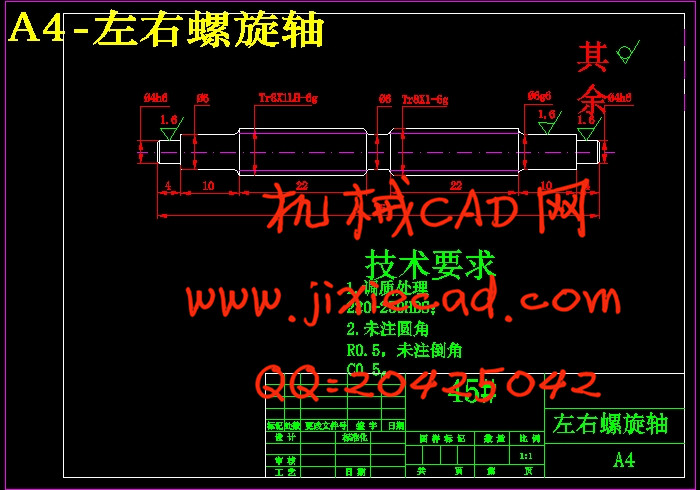
3.5 轴的设计计算 19
3.5.1按扭转强度计算 19
3.5.2按弯扭合成强度计算 19
3.5.3轴的刚度计算概念 20
3.5.4轴的设计步骤 20
3.6各轴的计算 21
3.7轴的设计与校核 23
3.8 轴承的设计及校核 24
3.8.1轴承种类的选择 24
3.8.2深沟球轴承结构 24
3.8.3轴承计算 26
第4章 整体车体结构设计 28
4.1 小车行走结构设计 28
4.1.1车体结构方案的比较与选择 28
4.1.2小车驱动电机功率的确定 29
4.2 蜗杆副的设计计算 32
4.2.1 蜗杆的选型 32
4.2.2 蜗杆副的材料 32
4.2.3 按齿面接触疲劳强度进行设计 32
4.2.4 蜗杆和蜗轮的主要计算参数和几何尺寸 35
4.2.5 校核蜗轮齿根弯曲疲劳强度 36
4.3 车轮部位电机选择 36
4.4 本章小结 37
总结与展望 38
参 考 文 献 39
致 谢 40