设计简介
摘 要
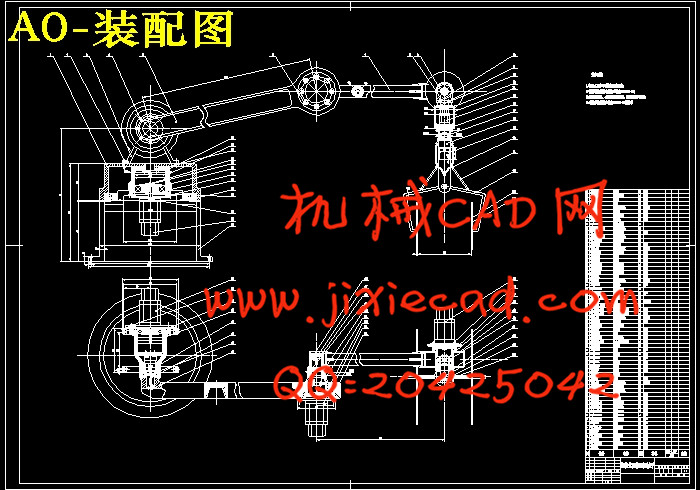
本课题主要根据目前化肥厂生产的化肥大多都是袋装的,都是工人搬运装车,由于工人的工作量大,工人劳动强度高,一些有毒物质对人体造成伤害,为了改善这种情况,本题目将设计一种袋装化肥搬运机械手,要搬运的袋装化肥重量为40-50千克,每次搬运一袋,工作循环为30秒,工作范围为3000mm。本课题研究的袋装化肥搬运机械手能代替人类、重复枯燥完成危险工作,提高劳动生产力,减轻人劳动强度。该装置涵盖了位置控制技术可编程控制技术、检测技术等。本课题拟开发的物料袋装化肥搬运机械手可在空间抓放物体,动作灵活多样,根据工件的变化及运动流程的要求随时更改相关参数,可代替人工在高温危险区进行作业。
关键词:机械手, 袋装化肥搬运机械手,抓取,提升
Abstract
This topic mainly based on the current fertilizer plant fertilizer mostly bags, are the workers handling loading due to the heavy workload of workers, high labor intensity, some toxic substances cause harm to humans, in order to improve the situation, this topic will be to design a robot handling fertilizer bags, fertilizer bags to carry the weight of 40-50 kg each carrying a bag, a duty cycle of 30 seconds, the working range of 3000mm.This research bagged fertilizer handling robot can replace humans, dangerous work to complete the tedious repetition, improve labor productivity, reduce human labor intensity. The device covers the position control programmable control technology, detection technology. The topic to be developed bagged fertilizer material handling robot can pick and place objects in space, flexible operation, change parameters based on changes in the work flow and movement requirements at any time, you can replace the manual operation in high temperature danger zone.
Keywords: robots, robot handling fertilizer bags, Gripping, lifting
目 录
摘 要 IAbstract II
目 录 III
1 绪论 1
1.1 机械手发展简史 1
1.2机械手的定义 2
1.3 袋装化肥搬运机械手的组成 3
1.4 袋装化肥搬运机械手的应用 3
1.5课题背景及目的 3
2设计任务分析及总体方案 4
2.1机械手设计原则 4
2.2机械手分类 5
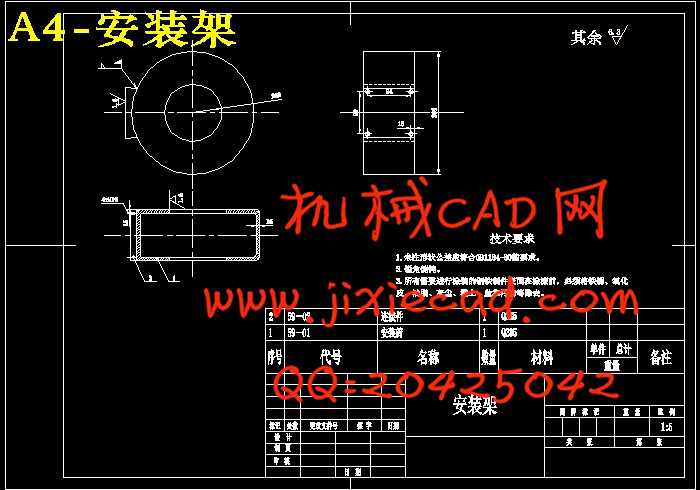
2.3机械手主要组成 5
2.4机械手结构布置要求及平稳性与定位精度 5
2.4.1 结构布置要求 5
2.4.2影响平稳性及定位精度的因素 6
2.5管路布置及效验 7
2.5.1机械手常用位置检测元件 7
2.5.2管路布置方法 7
3机械手的结构设计 8
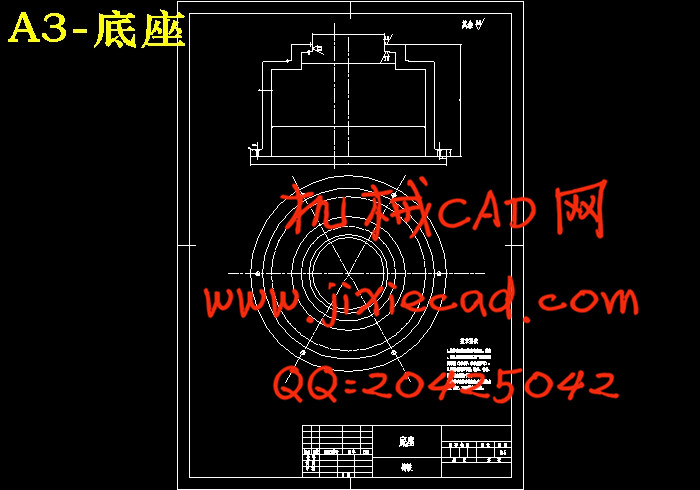
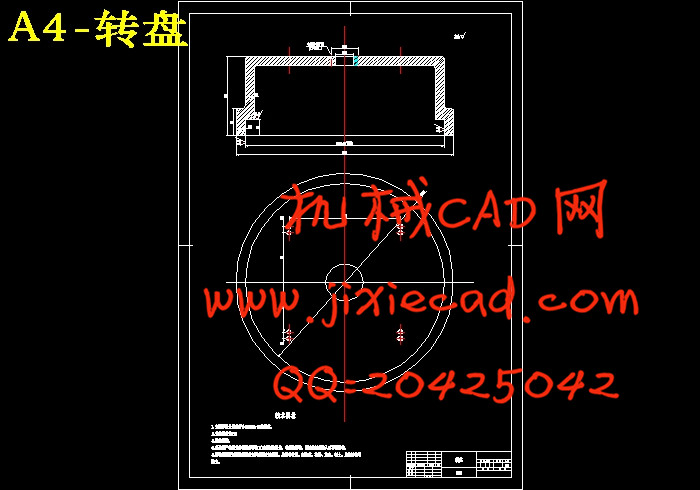
3.1 机座 9
3.2腰部 10
3.3减速机构——谐波齿轮减速器 10
3.3.1齿轮减速器 10
3.3.2蜗轮蜗杆减速器 10
3.3.3谐波齿轮减速器 10
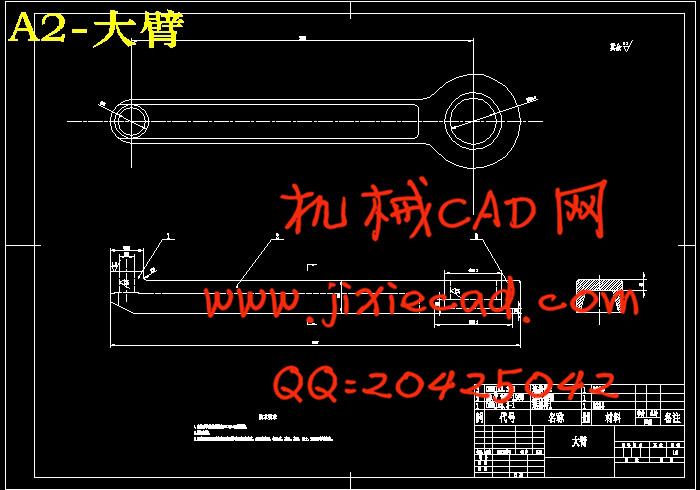
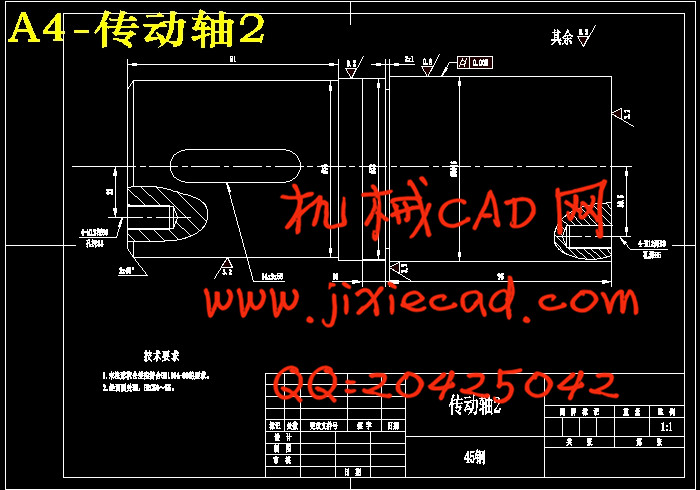
3.4机械手的手臂 12
3.4.1机械手的手臂设计时应注意的问题 13
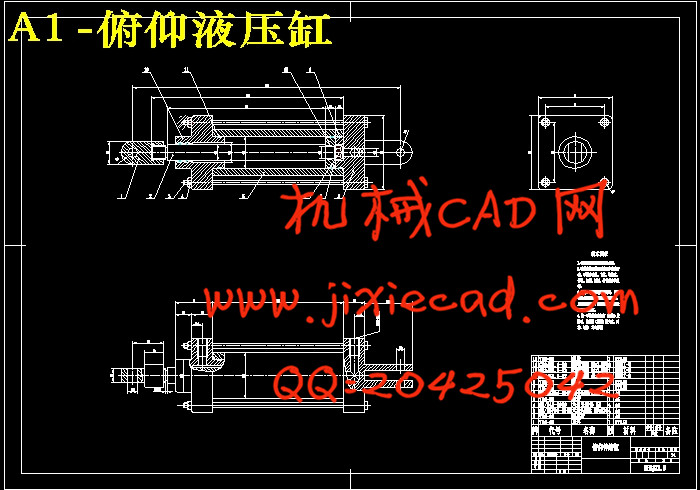
3.5液压缸 14
3.5.1液压传动的优点 15
3.5.2液压传动的缺点 16
3.6手部 16
3.6.1手爪 16
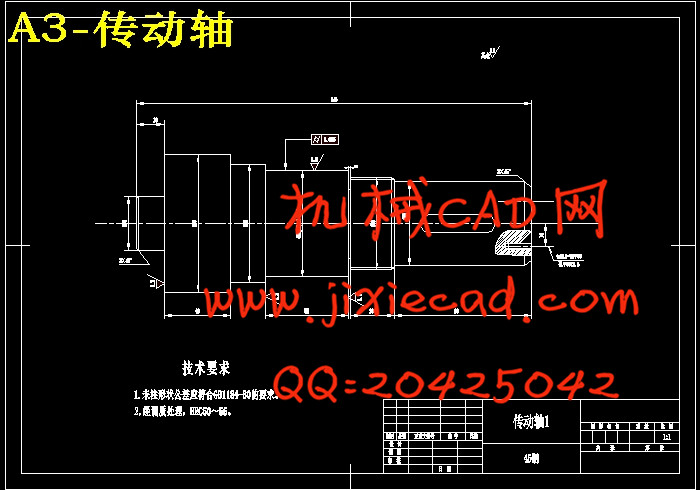
3.7电机 19
3.7.1电动机容量选择三项基本原则 19
3.7.2袋装化肥搬运机械手电动机的选择 20
4 驱动部件设计及计算 21
4.1液压系统 21
4.1.1液压传动装置的组成 21
4.1.2液压系统中在机械手中主要实现的辅助功能 22
4.1.3液压泵的计算 22
4.2主传动电机的选择 25
5主要零部件的计算 30
5.1手部液压缸的选择计算 30
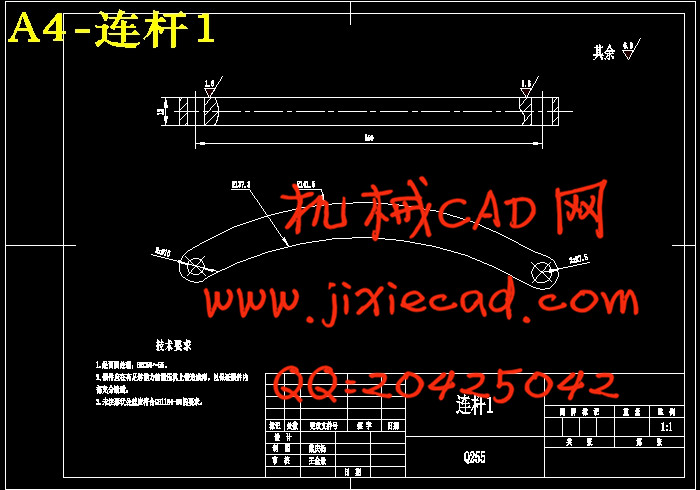
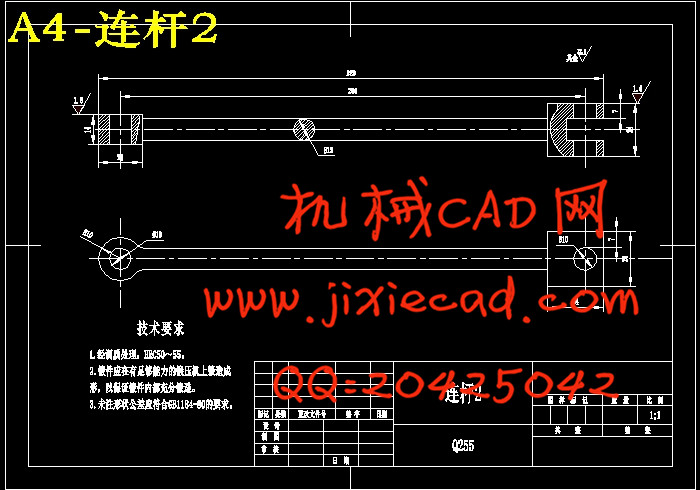
5.2推杆的计算 32
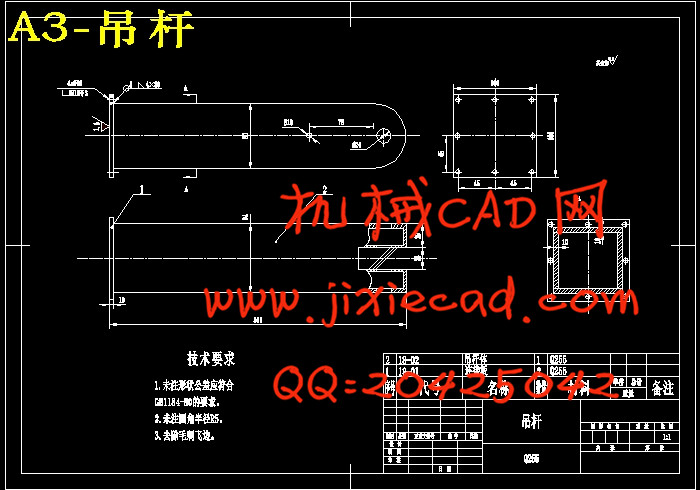
5.3吊杆的校核 33
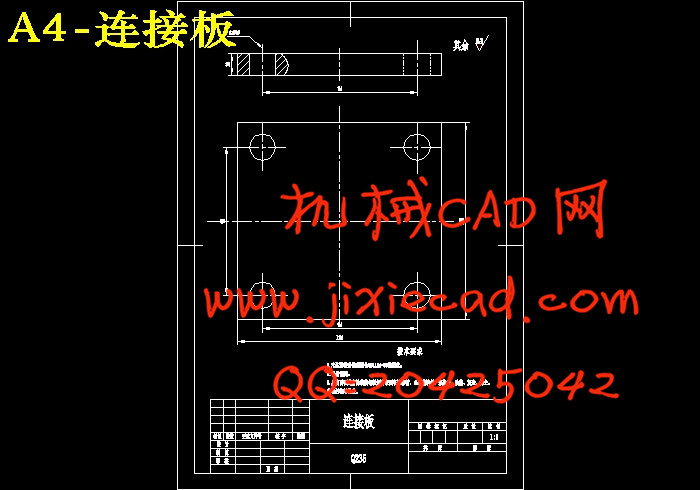
5.4危险螺栓组联结校核 34
5.5小臂的校核 36
结论 38
参考文献 39
致 谢 41