设计简介
灾害搜救工作的复杂性、危险性和紧迫性给救援工作带来了极大的困难。救援机器人以其体积小、灵活等诸多优点成为灾害辅助救援的有效工具并引起全世界的广泛关注。文中分析了救援行动中使用救援机器人的必要性和可行性,介绍了国内外救援机器人的研究历史和发展概况.
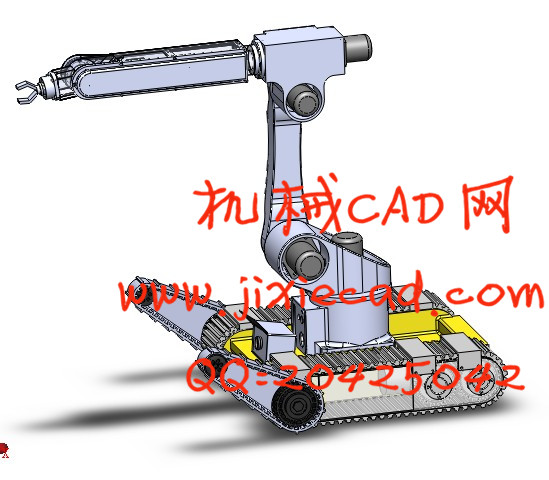
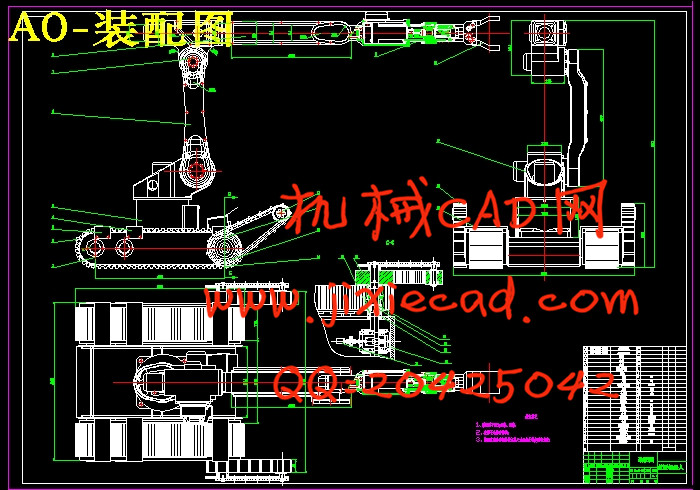
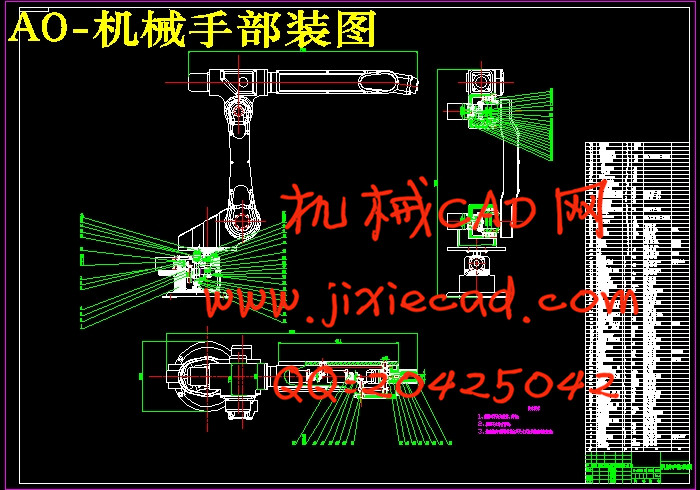
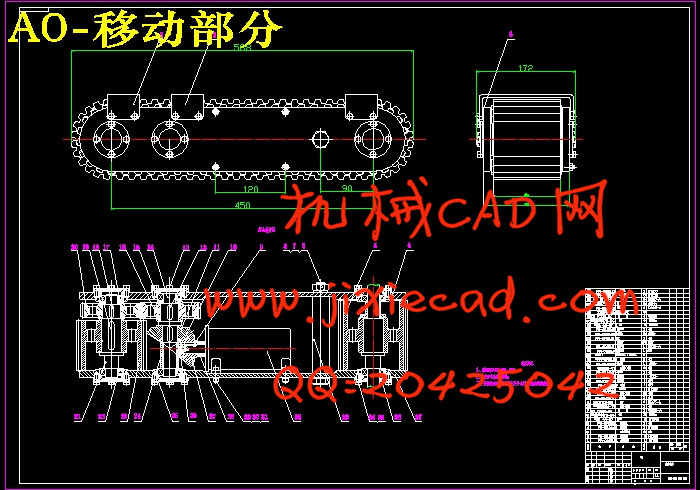
本文阐述了救援机器人的发展历程,国内外的应用现状,及其巨大的优越性,提出具体的机器人设计要求,进行了设计的总体方案设计和各自由度具体结构设计、计算;最后设计行走机构和机身设计。机械臂采用四关节机械手。
关键字:灾害救援机器人、结构设计、机械结构、四关节机械手
The complexity of the work of disaster rescue, danger and emergency rescue work has brought great difficulties. Rescue robot with its small size, flexible virtues such as disaster rescue tool assisted and caused widespread concern in the world. This paper analyzes the use of emergency rescue rescue robot's necessity and feasibility, introduced the research history and development situation of domestic and foreign rescue robot.
This paper discusses the development history of the rescue robot, application status at home and abroad, and its great superiority, the robot specific design requirements, the design, overall design and detailed design of each degree of freedom structure calculation; the final design of the walking mechanism and the fuselage design. Manipulator with four joints manipulator.
Keywords: disaster rescue robot, structure design, mechanical structure, four joint manipulator
Keywords :Structure design, Robot arm, Structure analysis
目 录
第1章 绪论 1
1.1 课题研究意义 1
1.2 救援机器人应用的必然性 1
1.2.1灾害现场影响救援工作的主要因素 1
1.2.1机器人在救援工作中的优势 2
1.3 国内外救援机器人研究现状 2
1.4救援机器人的分类 3
1.4.1履带式机器人 3
1.4.2蛇形(蠕虫)机器人系统 4
1.4.3蜘蛛形机器人 5
1.4.4飞行机器人 5
1.5救援机器人发展方向 5
1.5.1群体机器人研究 5
1.5.2全自主机器人研究 6
1.5.3全自主机器人研究 6
1.5.4任务多样化及传感检测技术 6
1.6 主要内容 7
第2章 总体方案设计 8
2.1 机械手工程概述 8
2.2 工业机械手总体设计方案论述 9
第3章 机器人总体方案设计 11
3.1总体设计的思路 11
3.2 设计方案过程及特点 11
3.3 总体结构的设计和比较 11
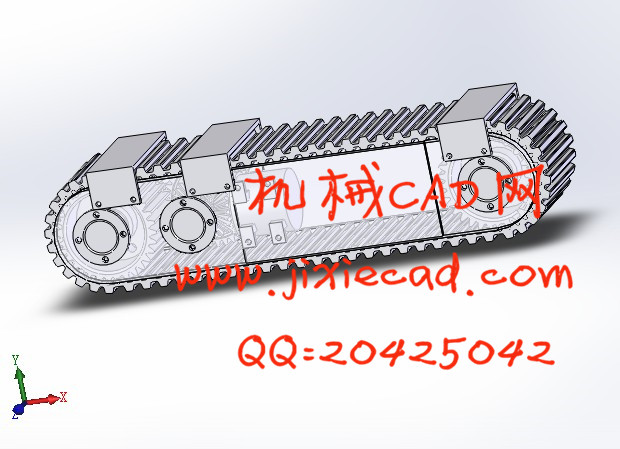
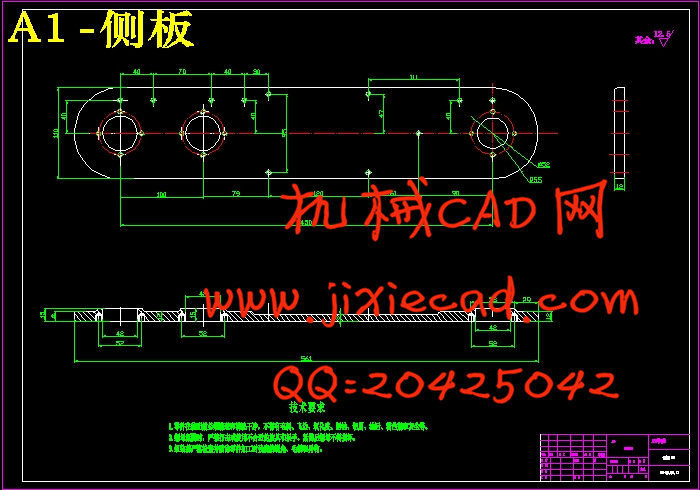
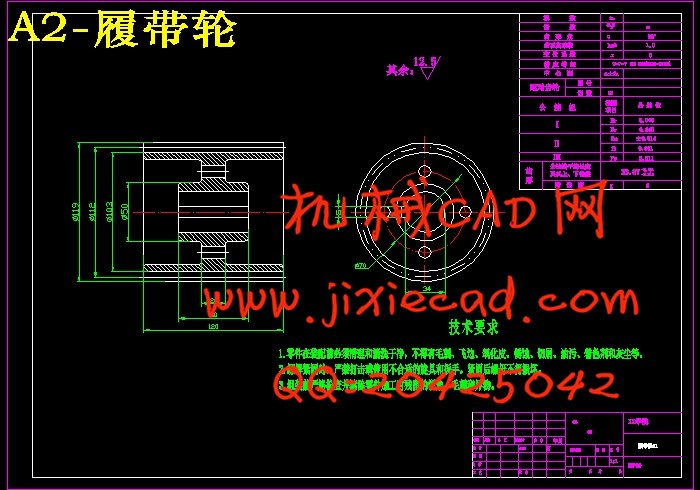
3.3.1 行走机构的设计 11
3.3.2 行走机构结构设计 12
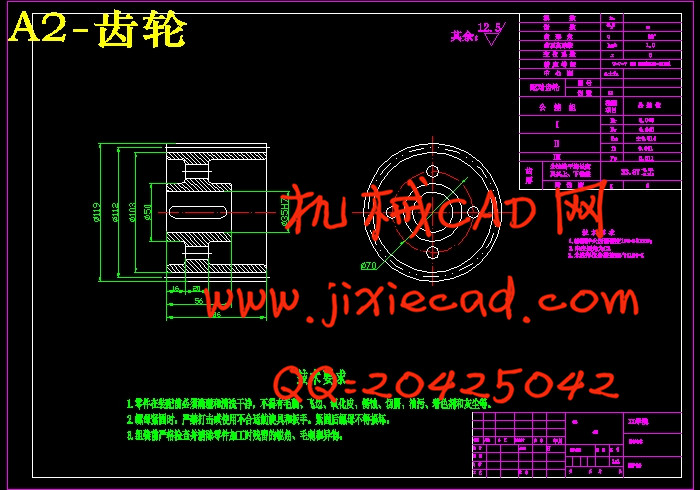
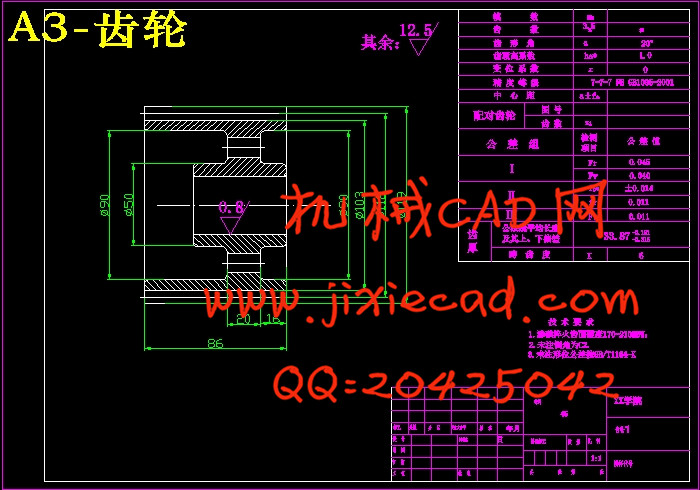
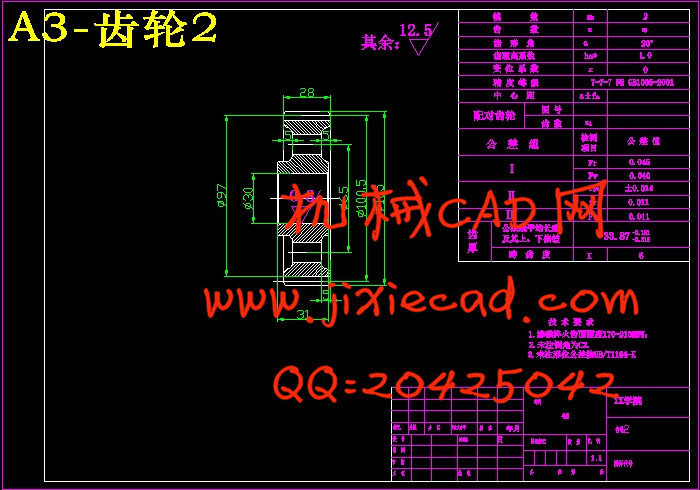
3.3大小锥齿轮的设计和校核 19
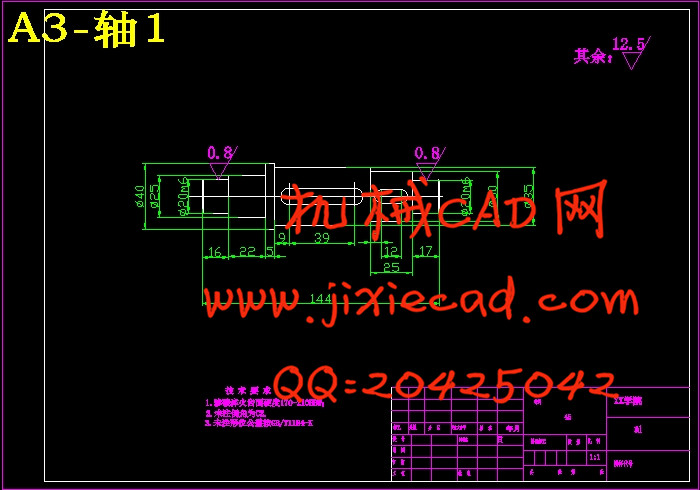
3.4 轴Ⅰ的设计和校核 23
3.5 键的校核 32
3.6 双摆臂驱动系统的计算 32
3.7 双摆臂减速电机的选取 33
3.8 双摆臂减速器的选取 34
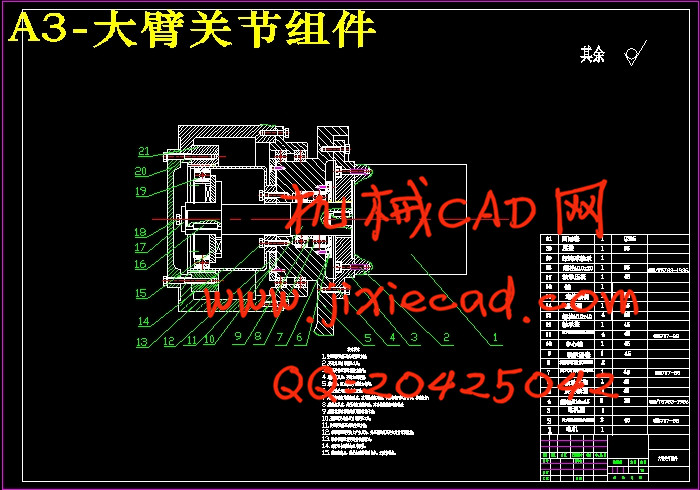
第4章 机械手大臂部结构 35
4.1 大臂部结构设计的基本要求 35
4.2 大臂部结构设计 36
4.3 大臂电机及减速器选型 36
4.4 减速器参数的计算 37
第5章 小臂结构设计 41
5.1 手爪夹持器结构设计与校核 41
5.1.1手爪夹持器种类 41
5.1.2夹持器设计计算 42
5.2 手腕偏转驱动计算 43
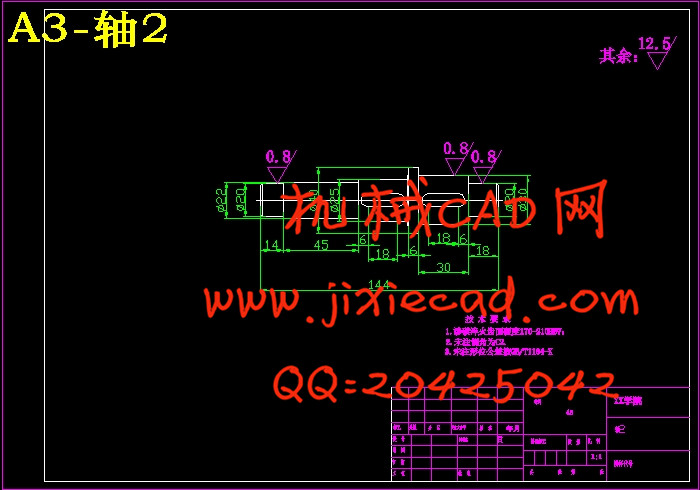
5.3 轴分析及计算 46
5.4 轴承的寿命校核 47
5.5 轴的强度校核 47
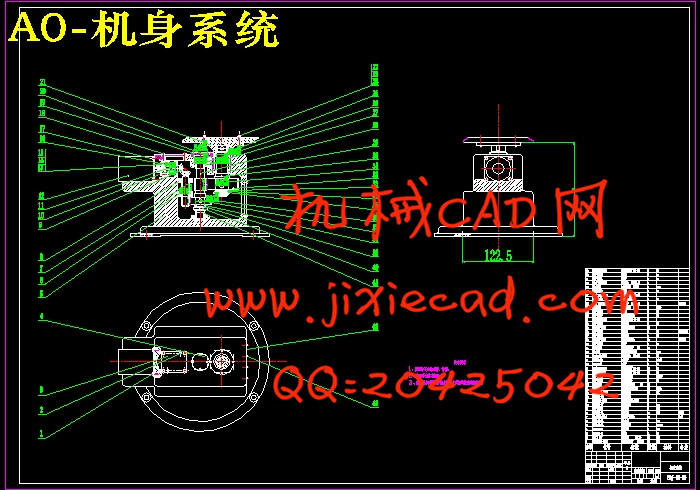
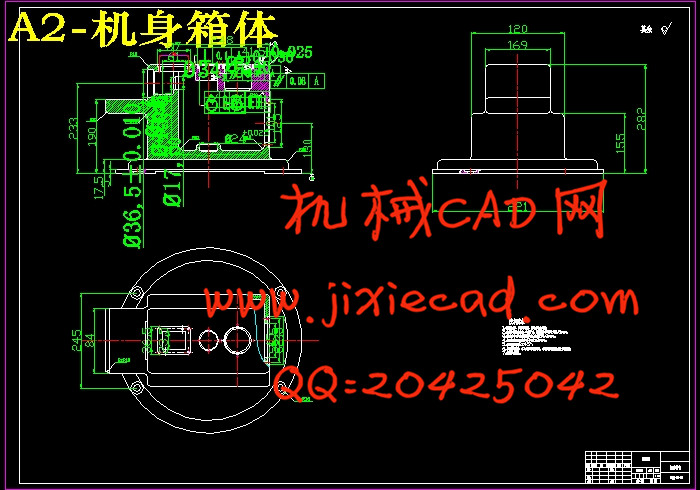
第6章 机身设计 49
6.1步进电机选择 49
6.2键的选择和校核 54
6.3 机身结构的设计 55
总结与展望 56
致 谢 57
参 考 文 献 58
本文阐述了救援机器人的发展历程,国内外的应用现状,及其巨大的优越性,提出具体的机器人设计要求,进行了设计的总体方案设计和各自由度具体结构设计、计算;最后设计行走机构和机身设计。机械臂采用四关节机械手。
关键字:灾害救援机器人、结构设计、机械结构、四关节机械手
The complexity of the work of disaster rescue, danger and emergency rescue work has brought great difficulties. Rescue robot with its small size, flexible virtues such as disaster rescue tool assisted and caused widespread concern in the world. This paper analyzes the use of emergency rescue rescue robot's necessity and feasibility, introduced the research history and development situation of domestic and foreign rescue robot.
This paper discusses the development history of the rescue robot, application status at home and abroad, and its great superiority, the robot specific design requirements, the design, overall design and detailed design of each degree of freedom structure calculation; the final design of the walking mechanism and the fuselage design. Manipulator with four joints manipulator.
Keywords: disaster rescue robot, structure design, mechanical structure, four joint manipulator
Keywords :Structure design, Robot arm, Structure analysis
目 录
第1章 绪论 1
1.1 课题研究意义 1
1.2 救援机器人应用的必然性 1
1.2.1灾害现场影响救援工作的主要因素 1
1.2.1机器人在救援工作中的优势 2
1.3 国内外救援机器人研究现状 2
1.4救援机器人的分类 3
1.4.1履带式机器人 3
1.4.2蛇形(蠕虫)机器人系统 4
1.4.3蜘蛛形机器人 5
1.4.4飞行机器人 5
1.5救援机器人发展方向 5
1.5.1群体机器人研究 5
1.5.2全自主机器人研究 6
1.5.3全自主机器人研究 6
1.5.4任务多样化及传感检测技术 6
1.6 主要内容 7
第2章 总体方案设计 8
2.1 机械手工程概述 8
2.2 工业机械手总体设计方案论述 9
第3章 机器人总体方案设计 11
3.1总体设计的思路 11
3.2 设计方案过程及特点 11
3.3 总体结构的设计和比较 11
3.3.1 行走机构的设计 11
3.3.2 行走机构结构设计 12
3.3大小锥齿轮的设计和校核 19
3.4 轴Ⅰ的设计和校核 23
3.5 键的校核 32
3.6 双摆臂驱动系统的计算 32
3.7 双摆臂减速电机的选取 33
3.8 双摆臂减速器的选取 34
第4章 机械手大臂部结构 35
4.1 大臂部结构设计的基本要求 35
4.2 大臂部结构设计 36
4.3 大臂电机及减速器选型 36
4.4 减速器参数的计算 37
第5章 小臂结构设计 41
5.1 手爪夹持器结构设计与校核 41
5.1.1手爪夹持器种类 41
5.1.2夹持器设计计算 42
5.2 手腕偏转驱动计算 43
5.3 轴分析及计算 46
5.4 轴承的寿命校核 47
5.5 轴的强度校核 47
第6章 机身设计 49
6.1步进电机选择 49
6.2键的选择和校核 54
6.3 机身结构的设计 55
总结与展望 56
致 谢 57
参 考 文 献 58