设计简介
PLC控制的通用翻转机械手的设计
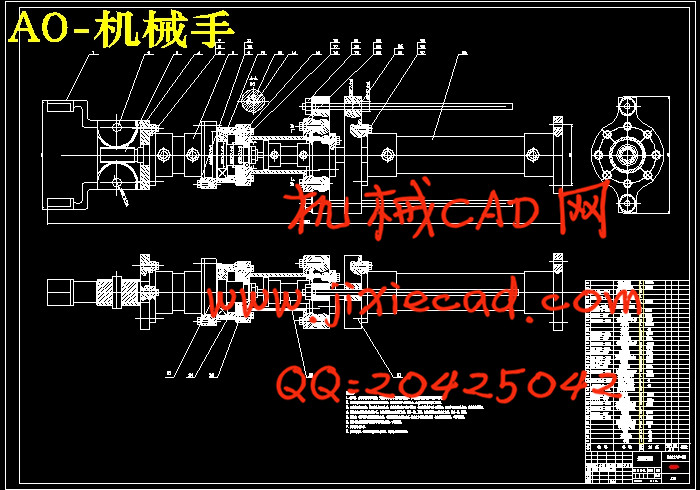
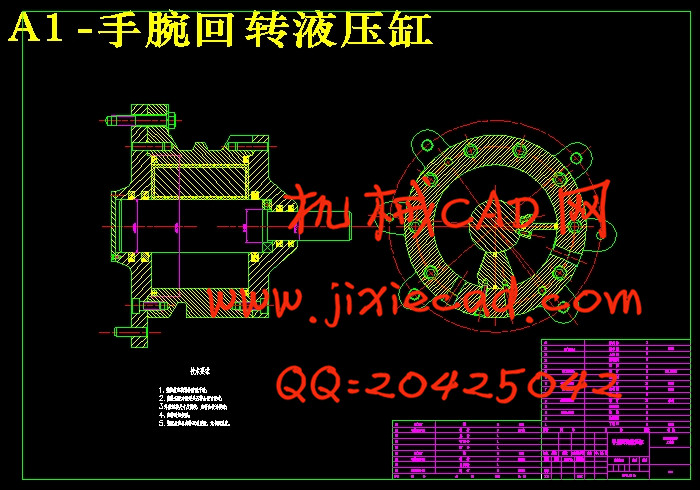
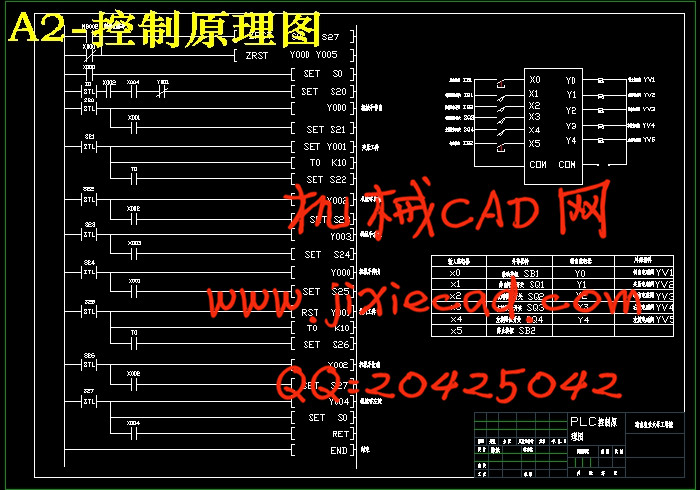
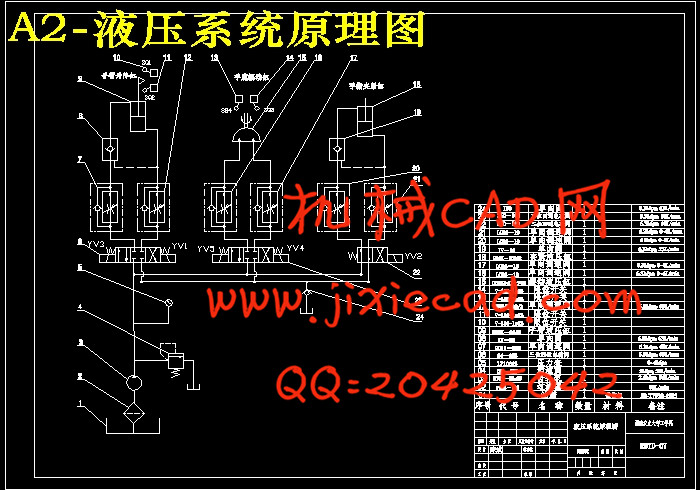
摘要:机械手是机器人的操作机,是机器人完成各种任务的执行机构。本文主要针对生产线上的自动化设计了一个三个自由度的通用翻转机械手。为实现机械手的动作要求,该设计采用两个活塞式液压缸和一个摆动液压缸,活塞式液压缸一个用来驱动齿条式机械手的张合来抓住物体,一个用来实现物体的移动;摆动式液压缸用来实现机械手的翻转,并采用PLC控制液压电磁阀工作实现机械手的自动动作。
关键词:PLC控制;液压驱动;翻转;机械手
The Design Of Turning Manipulator Based On PLC Control
Abstract: Robot manipulator is the operator who directs the robot in completing various tasks. This article focuses on the automation of the production line designed generic flip of a three-design-of-freedom robot. Actions requirements for achieveing the manipulator. The design uses two piston hydraulic cylinders and a rotary actuator. Piston hydraulic cylinder is used to drive a rack robot sheets together to grasp objects, one for the movement of objiect. The swining hydraulic cylinder used to acheve the robotic flip. And hydraulic solenoid valve is controlled by PLC automatic action of the robot.
Key words:PLC control ;hydraulic drive; flip; Manipulator
目 录
1 绪论………………………………………………………………………………5
1.1 前言………………………………………………………………………………5
1.2 工业机械手在生产中的应用……………………………………………………7
1.3 机械手的组成……………………………………………………………………8
1.3.1执行机构…………………………………………………………………8
1.3.2驱动机构……………………………………………………………9
1.3.3控制系统分类………………………………………………………9
2 总体布局设计方案…………………………………………………………………9
2.1 机械手的确定………………………………………………………………9
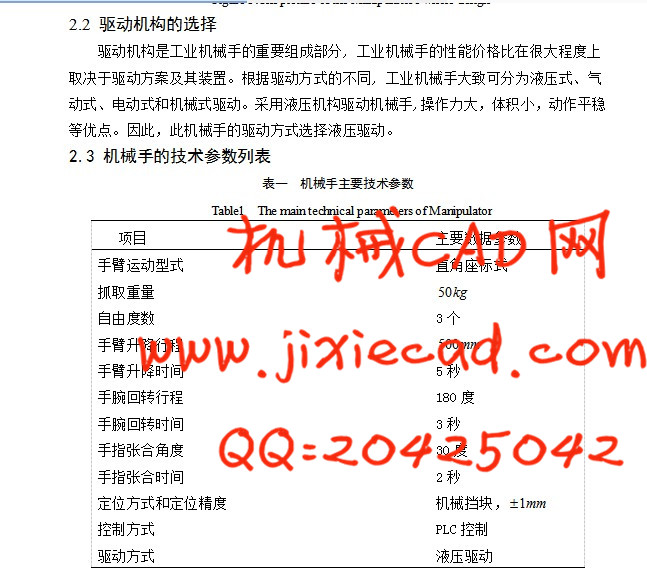
2.2驱动机构的选择……………………………………………………10
2.3 机械手的技术参数列表…………………………………………………11
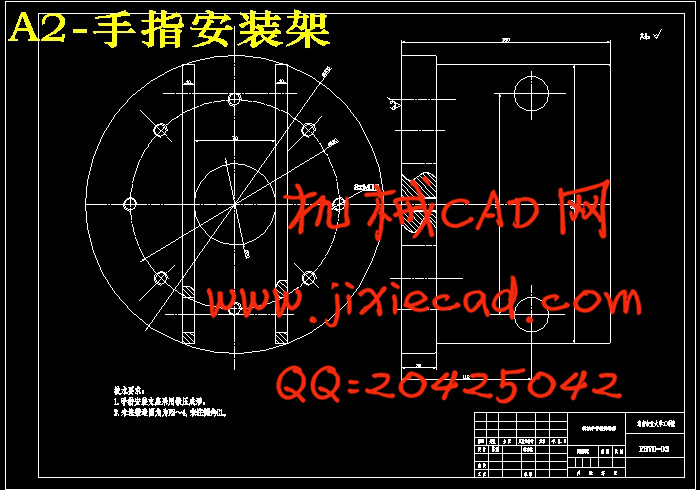
3 机械手手部的设计计算…………………………………………………………11
3.1 手部设计时应注意的问题…………………………………………………11
3.2 典型的手部结构……………………………………………………………11
3.3 机械手手部结构及驱动的设计计算………………………………………12
3.3.1选择手部的类型及夹紧装置………………………………………12
3.3.2手指夹紧力及液压缸驱动力的计算液压缸的选用………………12
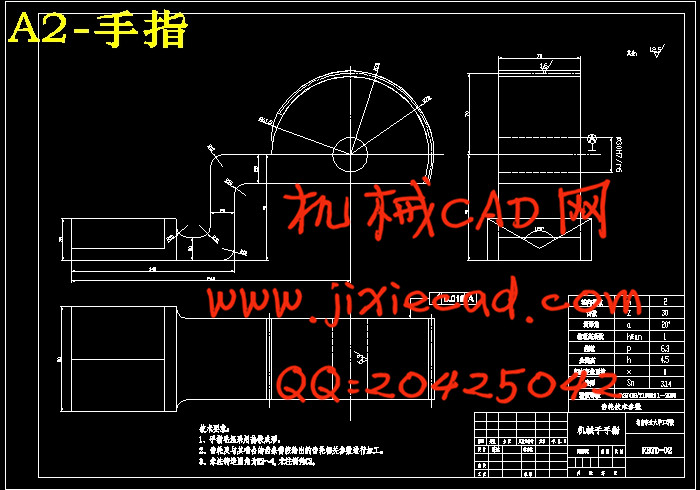
3.4 机械手手指部的设计计算………………………………………………14
3.4.1齿轮齿条传动机构的设计计算…………………………………14
3.4.2手指指部的设计计算……………………………………………18
3.4.3手指指部齿轮安装销的设计计算………………………………18
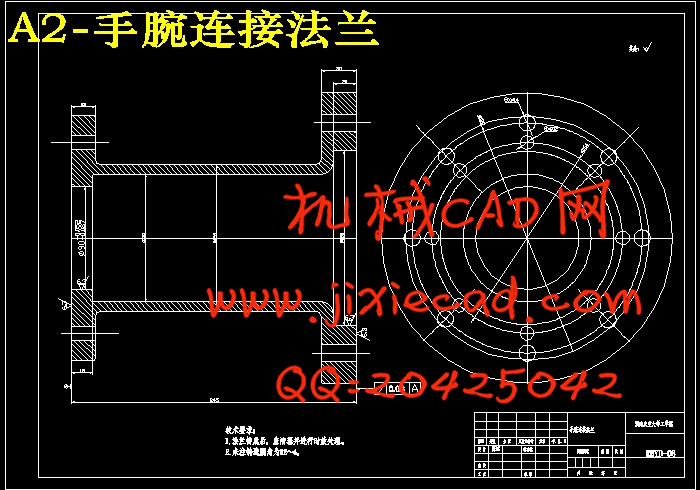
4 机械手腕部的设计计算…………………………………………………………18
4.1 机械手腕部结构及运动分析……………………………………………18
4.2 机械手腕部驱动装置的设计计算及选用………………………………18
5 机械手臂部的设计及有关计算…………………………………………………20
5.1 臂部设计时应注意的问题………………………………………………20
5.2 手臂的典型结构以及结构的选择………………………………………20
5.3 手臂Z方向升降运动的受力分析及其计算……………………………21
5.4手臂Z方向升降运动液压缸结构尺寸的设计计算及选用……………23
6 机身的设计…………………………………………………………………24
6.1 机身的概述……………………………………………………………24
6.2 机身设计时应注意的问题……………………………………………24
7 液压元件及动力机的设计选择………………………………………………25
7.1 液压泵的选择……………………………………………………………25
7.2动力机选择……………………………………………………………25
7.3 油管的设计………………………………………………………………26
7.4 油箱的设计………………………………………………………………26
7.5 液压元件的选择…………………………………………………………26
7.6 液压油的选用…………………………………………………………28
8 液压系统的验算………………………………………………………………29
8.1 压力损失的验算…………………………………………………………29
8.1.1回路压力损失的验算……………………………………………29
8.1.2局部压力损失验算……………………………………………29
8.2 计算液压系统的发热温升………………………………………………30
9 可编程控制器PLC………………………………………………………………31
9.1 PLC简介……………………………………………………………………31
9.2 PLC内部原理………………………………………………………………33
9.3 PLC工作元原理………………………………………………………35
9.4 PLC 机型的选择…………………………………………………………… 38
10 PLC工作控制过程简述………………………………………………………39
结束语…………………………………………………………………………40
参考文献 ……………………………………………………………………………41
致谢 …………………………………………………………………………………42
摘要:机械手是机器人的操作机,是机器人完成各种任务的执行机构。本文主要针对生产线上的自动化设计了一个三个自由度的通用翻转机械手。为实现机械手的动作要求,该设计采用两个活塞式液压缸和一个摆动液压缸,活塞式液压缸一个用来驱动齿条式机械手的张合来抓住物体,一个用来实现物体的移动;摆动式液压缸用来实现机械手的翻转,并采用PLC控制液压电磁阀工作实现机械手的自动动作。
关键词:PLC控制;液压驱动;翻转;机械手
The Design Of Turning Manipulator Based On PLC Control
Abstract: Robot manipulator is the operator who directs the robot in completing various tasks. This article focuses on the automation of the production line designed generic flip of a three-design-of-freedom robot. Actions requirements for achieveing the manipulator. The design uses two piston hydraulic cylinders and a rotary actuator. Piston hydraulic cylinder is used to drive a rack robot sheets together to grasp objects, one for the movement of objiect. The swining hydraulic cylinder used to acheve the robotic flip. And hydraulic solenoid valve is controlled by PLC automatic action of the robot.
Key words:PLC control ;hydraulic drive; flip; Manipulator
目 录
1 绪论………………………………………………………………………………5
1.1 前言………………………………………………………………………………5
1.2 工业机械手在生产中的应用……………………………………………………7
1.3 机械手的组成……………………………………………………………………8
1.3.1执行机构…………………………………………………………………8
1.3.2驱动机构……………………………………………………………9
1.3.3控制系统分类………………………………………………………9
2 总体布局设计方案…………………………………………………………………9
2.1 机械手的确定………………………………………………………………9
2.2驱动机构的选择……………………………………………………10
2.3 机械手的技术参数列表…………………………………………………11
3 机械手手部的设计计算…………………………………………………………11
3.1 手部设计时应注意的问题…………………………………………………11
3.2 典型的手部结构……………………………………………………………11
3.3 机械手手部结构及驱动的设计计算………………………………………12
3.3.1选择手部的类型及夹紧装置………………………………………12
3.3.2手指夹紧力及液压缸驱动力的计算液压缸的选用………………12
3.4 机械手手指部的设计计算………………………………………………14
3.4.1齿轮齿条传动机构的设计计算…………………………………14
3.4.2手指指部的设计计算……………………………………………18
3.4.3手指指部齿轮安装销的设计计算………………………………18
4 机械手腕部的设计计算…………………………………………………………18
4.1 机械手腕部结构及运动分析……………………………………………18
4.2 机械手腕部驱动装置的设计计算及选用………………………………18
5 机械手臂部的设计及有关计算…………………………………………………20
5.1 臂部设计时应注意的问题………………………………………………20
5.2 手臂的典型结构以及结构的选择………………………………………20
5.3 手臂Z方向升降运动的受力分析及其计算……………………………21
5.4手臂Z方向升降运动液压缸结构尺寸的设计计算及选用……………23
6 机身的设计…………………………………………………………………24
6.1 机身的概述……………………………………………………………24
6.2 机身设计时应注意的问题……………………………………………24
7 液压元件及动力机的设计选择………………………………………………25
7.1 液压泵的选择……………………………………………………………25
7.2动力机选择……………………………………………………………25
7.3 油管的设计………………………………………………………………26
7.4 油箱的设计………………………………………………………………26
7.5 液压元件的选择…………………………………………………………26
7.6 液压油的选用…………………………………………………………28
8 液压系统的验算………………………………………………………………29
8.1 压力损失的验算…………………………………………………………29
8.1.1回路压力损失的验算……………………………………………29
8.1.2局部压力损失验算……………………………………………29
8.2 计算液压系统的发热温升………………………………………………30
9 可编程控制器PLC………………………………………………………………31
9.1 PLC简介……………………………………………………………………31
9.2 PLC内部原理………………………………………………………………33
9.3 PLC工作元原理………………………………………………………35
9.4 PLC 机型的选择…………………………………………………………… 38
10 PLC工作控制过程简述………………………………………………………39
结束语…………………………………………………………………………40
参考文献 ……………………………………………………………………………41
致谢 …………………………………………………………………………………42