设计简介
摘 要
机器人是一个国家的重要产业,机器人的发展无时不刻都在影响着国家经济的发展,人类的进步离不开机器人的发展。在全球经济发展的大环境下,中国各个行业被其他国家的先进技术影响的同时,越来越多的外国企业和品牌传播到中国已经成为现实。在新的市场需求的推动下,对大型六边形滚动机器人进行改良和优化是当务之急。有大型机器人生产制造企业对设备的安全指标的有着一定生产的严格要求。在生产设备的企业,充分考虑到在设备运行中可能出现的问题,从而减少噪声污染引起的振动或不当操作设备的现象等。国内大型六边形滚动机器人设备的研发及制造要与全球号召的高效经济、安全稳定主题保持一致。大型六边形滚动机器人的发展与人类社会的进步和科学技术的水平密切相关。
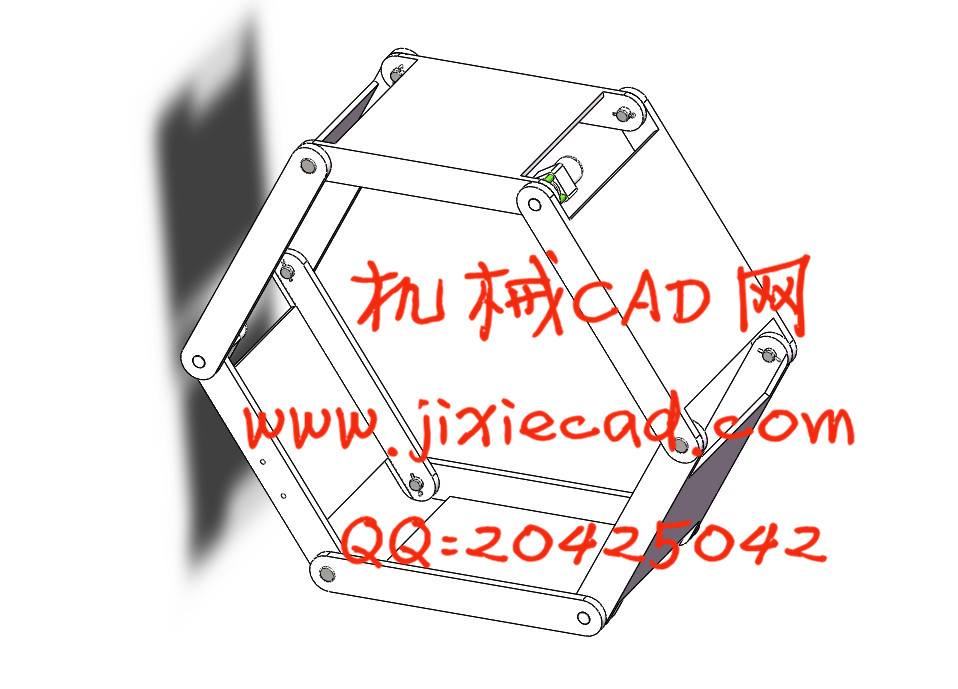
本毕业设计的目标是设计一种大型六边形滚动机构,该机构尺寸为大型,由六个长度相等的连杆首尾通过转动副连接而成,通过控制交错的3个转动副,可以实现几何变形,如三角形、四边形、五边形、六边形,也可以实现滚动移动的步态,控制部分舵机进行驱动,该机器人利用人体操作实现机构运动的控制。采用六杆机构作为设计基础,通过机构设计与仿真设计实现滚动功能。
关键词:大型六边形滚动机器人;结构;六杆机构;曲柄摇杆
机器人是一个国家的重要产业,机器人的发展无时不刻都在影响着国家经济的发展,人类的进步离不开机器人的发展。在全球经济发展的大环境下,中国各个行业被其他国家的先进技术影响的同时,越来越多的外国企业和品牌传播到中国已经成为现实。在新的市场需求的推动下,对大型六边形滚动机器人进行改良和优化是当务之急。有大型机器人生产制造企业对设备的安全指标的有着一定生产的严格要求。在生产设备的企业,充分考虑到在设备运行中可能出现的问题,从而减少噪声污染引起的振动或不当操作设备的现象等。国内大型六边形滚动机器人设备的研发及制造要与全球号召的高效经济、安全稳定主题保持一致。大型六边形滚动机器人的发展与人类社会的进步和科学技术的水平密切相关。
本毕业设计的目标是设计一种大型六边形滚动机构,该机构尺寸为大型,由六个长度相等的连杆首尾通过转动副连接而成,通过控制交错的3个转动副,可以实现几何变形,如三角形、四边形、五边形、六边形,也可以实现滚动移动的步态,控制部分舵机进行驱动,该机器人利用人体操作实现机构运动的控制。采用六杆机构作为设计基础,通过机构设计与仿真设计实现滚动功能。
关键词:大型六边形滚动机器人;结构;六杆机构;曲柄摇杆
ABSTRACT
With development of all kind of science technology and global economy, F manipulator is a automated 16 devices that can mimic the human hand and arm movements to do something,aslo can according to a fixed procedure to moving objects or control tools. It can replace the heay labor in order to achieve the production mechanization and automation, and can work in dangerous working environments to protect the personal safety.Therefore widely used in machine building, metallurgy, electronics, light industry and atomic energy sectors.The pneumatic part of the design is primarily to choose the right valves and design a reasonable pneumatic control loop, by controlling and regulating pressure, flow atcompress ength.
Ththdirec tionpro cedurework. Artificial intelligence and the relationship between mechanical engineering in the brain and the hand approximation, the relationship between the difference is only in artificial intelligence will need to use the hardware machinery manufacturing. In the past, all kinds of machinery without man's operating and controlling the reaction speed, accuracy and operating by the brain evolved slowly and nervous system restriction, artificial intelligence will eliminate this restriction. Computer science and mechanical engineering, the mutual promotion between parallel, will make the mechanical engineering at the higher level is the beginning of a new roundofdevelopment,The inverted pendulum is a typical high order system, with multi variable, non-linear, strong-coupling, fleet and absolutely instable.
Key word: Micro walking robot;construction;four-bar linkage;crank-rocker
目 录
摘 要 iWith development of all kind of science technology and global economy, F manipulator is a automated 16 devices that can mimic the human hand and arm movements to do something,aslo can according to a fixed procedure to moving objects or control tools. It can replace the heay labor in order to achieve the production mechanization and automation, and can work in dangerous working environments to protect the personal safety.Therefore widely used in machine building, metallurgy, electronics, light industry and atomic energy sectors.The pneumatic part of the design is primarily to choose the right valves and design a reasonable pneumatic control loop, by controlling and regulating pressure, flow atcompress ength.
Ththdirec tionpro cedurework. Artificial intelligence and the relationship between mechanical engineering in the brain and the hand approximation, the relationship between the difference is only in artificial intelligence will need to use the hardware machinery manufacturing. In the past, all kinds of machinery without man's operating and controlling the reaction speed, accuracy and operating by the brain evolved slowly and nervous system restriction, artificial intelligence will eliminate this restriction. Computer science and mechanical engineering, the mutual promotion between parallel, will make the mechanical engineering at the higher level is the beginning of a new roundofdevelopment,The inverted pendulum is a typical high order system, with multi variable, non-linear, strong-coupling, fleet and absolutely instable.
Key word: Micro walking robot;construction;four-bar linkage;crank-rocker
目 录
ABSTRACT ii
目 录 iii
1绪论 1
1.1课题来历与研究的目的以及意义 1
1.2机器人的分类 2
1.3本课题研究的内容 5
1.4 该机器人的Solidworks设计 7
1.4.1 草图绘制 9
1.4.2 基准特征,参考几何体的创建 10
1.4.3 拉伸、旋转、扫描和放样特征建 11
1.4.4 工程图的设计 12
1.4.5 装配设计 12
2 大型六边形滚动机器人总体方案结构的设计 12
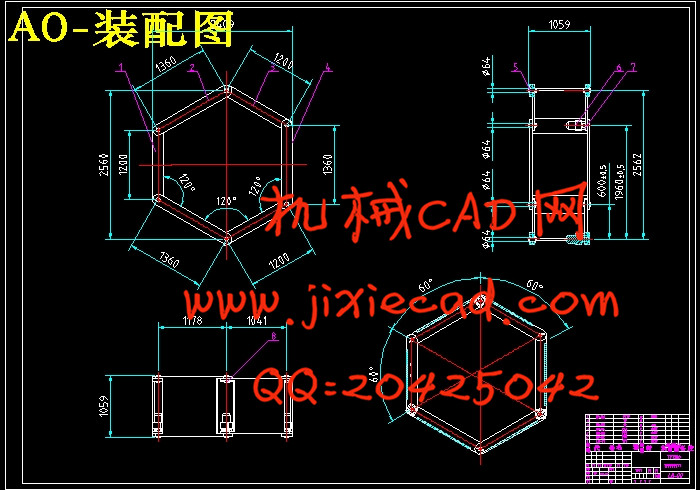
2.1 大型六边形滚动机器人的总体方案图 12
3 机械传动的设计计算 16
3.1 电机的选型计算 16
3.2 传动轴的设计计算 17
3.3 轴承的设计计算 17
4 主要零部件的强度校核 18
4.1 传动轴强度的校核 18
4.2 轴承强度的校核计算 18
5 大型六边形滚动机构中主要零件的三维建模 18
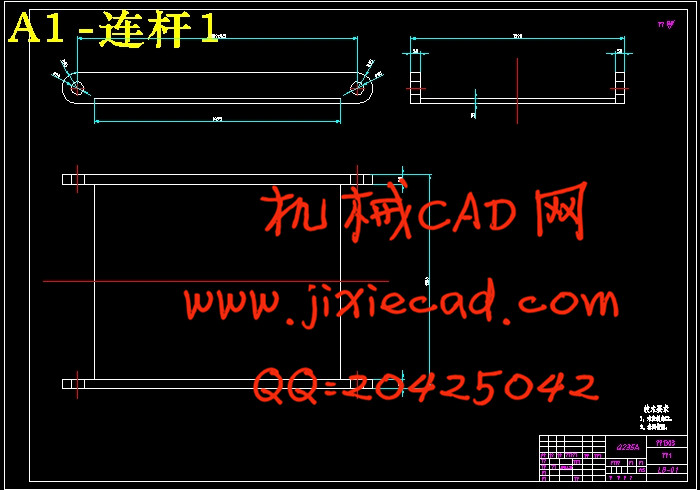
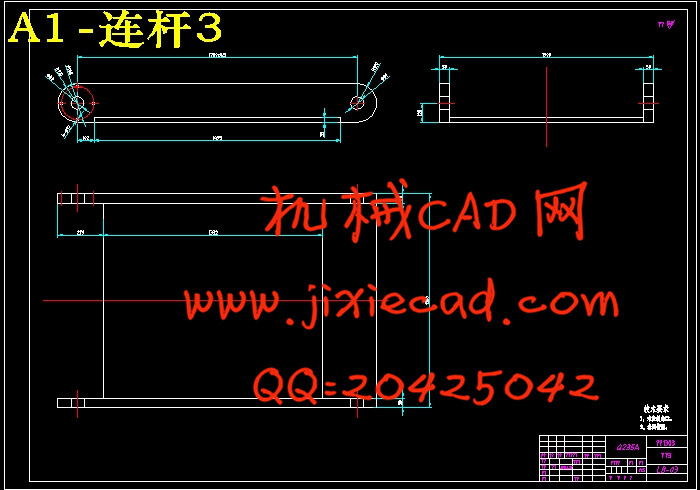
5.1连杆1的三维建模 19
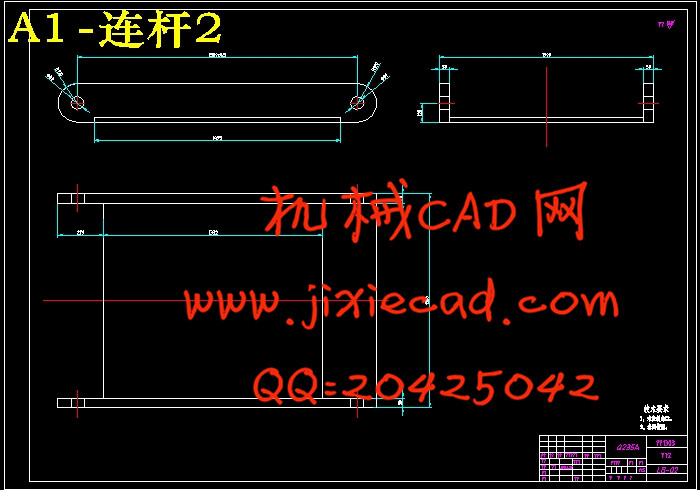
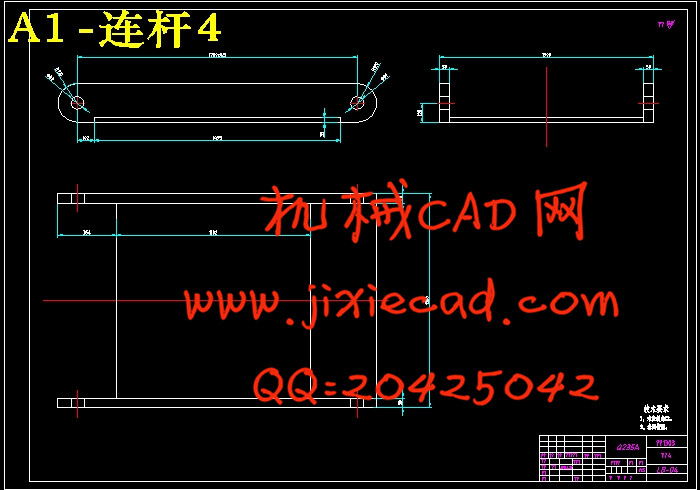
5.2连杆2的三维建模 19
5.3电机的三维建模 19
5.4大型六边形滚动机构的三维建模 19
结论 19
致 谢 20
参考文献 21