设计简介
基于PLC的液体混合控制系统的设计
摘 要
可编程序控制器(PLC)是一种新型的通用的自动控制装置,它将传统的继电器控制技术、计算机技术和通讯技术融为一体,是功能加强、编程简单、使用方便以及体积小、重量轻、功耗低等一系列优点。PLC的应用领域已经拓宽到了各个领域,PLC的发展历程在工业生产过程中,大量的开关量顺序控制,它按照逻辑条件进行顺序动作,并按照逻辑关系进行连锁保护动作的控制,及大量离散量的数据采集。在传统上,这些功能是通过气动或电气控制系统来实现的。PLC最基本最广泛的用于开关量的逻辑控制,它取代传统的继电器电路,实现逻辑控制,顺序控制,既可用于单台设备的控制,也可用于多机群控及自动化流水线。如注塑机,印刷机,订书机,组合智能窗帘,磨床,包装等。目前,PLC在国内外已广泛应用于钢铁,石油,化工,电力,建材,机械制造,汽车,轻纺,交通运输,环保及文化娱乐等各个行业,使用广泛。
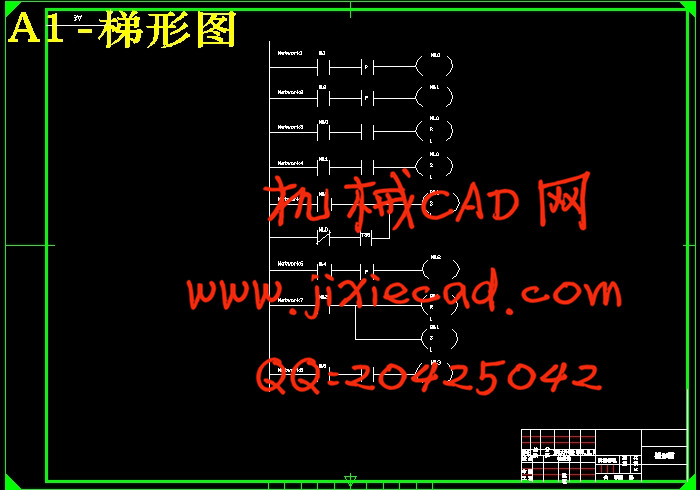
本文以三种液体的混合灌装控制为例,将三种液体按一定比例混合,在电动机搅拌后要达到控制要求才能将混合的液体输出容器,并形成循环状态。液体混合系 统的控制设计考虑到其动作的连续性以及各个被控设备动作之间的相互关联性,针对不同的工作状态,进行相应的动作控制输出,从而实现液体混合系统从第一种液体加入到混合完成输出的这样一个周期控制工作的程序实现。设计以液体混 合控制系统为中心,从控制系统的硬件系统组成、软件选用到系统的设计过程(包括设计方案、设计流程、设计要求、梯形图设计、外部连接通信等),旨在对其中的设计及制作过程做简单的介绍和说明。
关键词 PLC 控制 液体混合 说明
摘 要
可编程序控制器(PLC)是一种新型的通用的自动控制装置,它将传统的继电器控制技术、计算机技术和通讯技术融为一体,是功能加强、编程简单、使用方便以及体积小、重量轻、功耗低等一系列优点。PLC的应用领域已经拓宽到了各个领域,PLC的发展历程在工业生产过程中,大量的开关量顺序控制,它按照逻辑条件进行顺序动作,并按照逻辑关系进行连锁保护动作的控制,及大量离散量的数据采集。在传统上,这些功能是通过气动或电气控制系统来实现的。PLC最基本最广泛的用于开关量的逻辑控制,它取代传统的继电器电路,实现逻辑控制,顺序控制,既可用于单台设备的控制,也可用于多机群控及自动化流水线。如注塑机,印刷机,订书机,组合智能窗帘,磨床,包装等。目前,PLC在国内外已广泛应用于钢铁,石油,化工,电力,建材,机械制造,汽车,轻纺,交通运输,环保及文化娱乐等各个行业,使用广泛。
本文以三种液体的混合灌装控制为例,将三种液体按一定比例混合,在电动机搅拌后要达到控制要求才能将混合的液体输出容器,并形成循环状态。液体混合系 统的控制设计考虑到其动作的连续性以及各个被控设备动作之间的相互关联性,针对不同的工作状态,进行相应的动作控制输出,从而实现液体混合系统从第一种液体加入到混合完成输出的这样一个周期控制工作的程序实现。设计以液体混 合控制系统为中心,从控制系统的硬件系统组成、软件选用到系统的设计过程(包括设计方案、设计流程、设计要求、梯形图设计、外部连接通信等),旨在对其中的设计及制作过程做简单的介绍和说明。
关键词 PLC 控制 液体混合 说明
The design of liquid mixing control system based on PLC
ABSTRACT
With development of all kind of science technology and global economy, Pneumatic manipulator is a automated devices that can mimic the human hand and arm movements to do something,aslo can according to a fixed procedure to moving objects or control tools. It can replace the heavy labor in order to achieve the production mechanization and automation, and can work in dangerous working environments to protect the personal safety.Therefore widely used in machine building, metallurgy, electronics, light industry and atomic energy sectors..The inverted pendulum is a typical high order system, with multi variable, non-linear, strong-coupling, fleet and absolutely instable. It is representative as an ideal model to prove new control theory and techniques. During the control process, pendulum can effectively reflect many key problems such as equanimity, robust, follow-up and track, therefore.This paper studies a control method of double inverted pendulum . First of all, the mathematical model of the double inverted pendulum is established.
Themake a control design to double inverted pendulum on the mathematical model, and determine the system performance index weightmatrix , by using genetic algorithm in order to attain the system state feedback control matrix. Finally, the simulation of the system is made by . After several test matrix value the results are not satisfactory response, then we optimize matrix by using Genetic Algorithm. Simulation results show: The system response can meet the design requirements effectively after Genetic Algorithm optimization. Small twisted paper broken machine for meat. the system state feedback control matrix.
Keywords PLC cylinder pneumatic Fout degrees of freedom
目录
第一章 绪论 1
1.1 课题的研究背景和历史意义 3
1.2 选题的目的和意义 4
第二章 液体混合控制系统PLC控制系统的设计 5
2.1 PLC简介 6
2.1.1 PLC的定义 8
2.1.2 PLC的用途 9
2.2 PLC的组成 11
2.2.1中央处理单元 13
2.2.2存储器 14
2.2.3输入输出单元 16
2.2.4通讯接口 17
2.2.5智能接口模块 18
2.2.6编程装置 19
2.2.7电源 19
第三章 控制系统设计 20
3.1 硬件设计 20
3.2 混合装置的基本组成 20
3.3 液体混合装置电气原理图的绘制 21
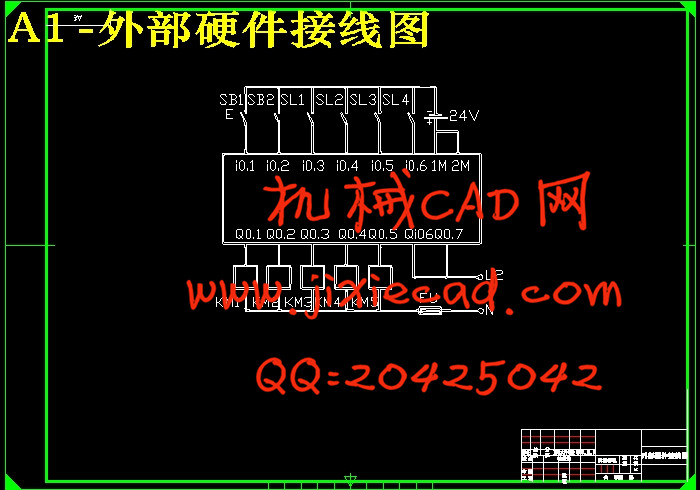
3.4 PLCI/O点分配及外部硬件接线图 22
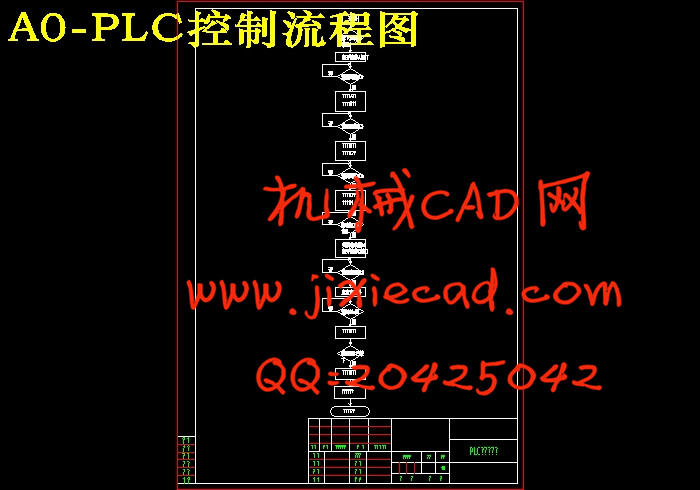
3.5液体混合系统运行流程图 22
结论 23
致谢 24
参考文献 25
ABSTRACT
With development of all kind of science technology and global economy, Pneumatic manipulator is a automated devices that can mimic the human hand and arm movements to do something,aslo can according to a fixed procedure to moving objects or control tools. It can replace the heavy labor in order to achieve the production mechanization and automation, and can work in dangerous working environments to protect the personal safety.Therefore widely used in machine building, metallurgy, electronics, light industry and atomic energy sectors..The inverted pendulum is a typical high order system, with multi variable, non-linear, strong-coupling, fleet and absolutely instable. It is representative as an ideal model to prove new control theory and techniques. During the control process, pendulum can effectively reflect many key problems such as equanimity, robust, follow-up and track, therefore.This paper studies a control method of double inverted pendulum . First of all, the mathematical model of the double inverted pendulum is established.
Themake a control design to double inverted pendulum on the mathematical model, and determine the system performance index weightmatrix , by using genetic algorithm in order to attain the system state feedback control matrix. Finally, the simulation of the system is made by . After several test matrix value the results are not satisfactory response, then we optimize matrix by using Genetic Algorithm. Simulation results show: The system response can meet the design requirements effectively after Genetic Algorithm optimization. Small twisted paper broken machine for meat. the system state feedback control matrix.
Keywords PLC cylinder pneumatic Fout degrees of freedom
目录
第一章 绪论 1
1.1 课题的研究背景和历史意义 3
1.2 选题的目的和意义 4
第二章 液体混合控制系统PLC控制系统的设计 5
2.1 PLC简介 6
2.1.1 PLC的定义 8
2.1.2 PLC的用途 9
2.2 PLC的组成 11
2.2.1中央处理单元 13
2.2.2存储器 14
2.2.3输入输出单元 16
2.2.4通讯接口 17
2.2.5智能接口模块 18
2.2.6编程装置 19
2.2.7电源 19
第三章 控制系统设计 20
3.1 硬件设计 20
3.2 混合装置的基本组成 20
3.3 液体混合装置电气原理图的绘制 21
3.4 PLCI/O点分配及外部硬件接线图 22
3.5液体混合系统运行流程图 22
结论 23
致谢 24
参考文献 25