设计简介
摘 要
本课题来源于当今社会机械工业桌面装饰机械的创新和更新换代基础之上,通过设计出桌面装饰机械,从而来满足当今社会桌面装饰机械不足的缺陷。
国内桌面装饰机械的研发及制造要与全球号召的高效经济、缩放形态好等主题保持一致。近期对机械行业中桌面装饰机械的使用情况进行了调查,发现在机械行业中,饰品的使用非常普遍。自然而然在机械设备中它们的装饰也非常重要,因为一个好的桌面装饰机械,更能陪衬出饰品的独特的美。
本文运用大学所学的知识,提出了桌面装饰机械的结构组成、工作原理以及主要零部件的设计中所必须的理论计算和相关强度校验,构建了桌面装饰机械总的指导思想,从而得出了该桌面装饰机械的优点是美观,大气,牢固的结论。
关键词:桌面装饰机械;结构;缩放;结论
本课题来源于当今社会机械工业桌面装饰机械的创新和更新换代基础之上,通过设计出桌面装饰机械,从而来满足当今社会桌面装饰机械不足的缺陷。
国内桌面装饰机械的研发及制造要与全球号召的高效经济、缩放形态好等主题保持一致。近期对机械行业中桌面装饰机械的使用情况进行了调查,发现在机械行业中,饰品的使用非常普遍。自然而然在机械设备中它们的装饰也非常重要,因为一个好的桌面装饰机械,更能陪衬出饰品的独特的美。
本文运用大学所学的知识,提出了桌面装饰机械的结构组成、工作原理以及主要零部件的设计中所必须的理论计算和相关强度校验,构建了桌面装饰机械总的指导思想,从而得出了该桌面装饰机械的优点是美观,大气,牢固的结论。
关键词:桌面装饰机械;结构;缩放;结论
ABSTRACT
In nature and human society, humans can not reach the place and special occasions may endanger human life, such as websites, many areas such as disaster relief.
continuous exploration on these complex environment often requires the intervention of robot. Micro walking robot is an important branch of robot,walking robots and more than six feet, compared to the Eight Legged Robot, because of strong bearing capacity, good stability, has the advantages of simple.
This paper mainly to the four bar mechanism as the main execution elements to design of micro walking the whole scheme of the four bar mechanism. The mechanism uses diagonal consistent principle, through the crank rocker mechanism to drive the motion of the legs, left front leg and the right foreleg consistent action,.it is the concrete embodiment of linkage curve feature, when the curve trajectory diagonal straight line segment, the robot on the ground is fixed, the motion trajectory when the diagonal curve is slanting line do the walking motion, robot. The miniature walking robot is mainly driven by DC servo motor, so as to drive the leg action driven synchronous belt wheel by a crank and rocker mechanism.
Key word: pneumatic manipulator;cylinder;pneumatic loop;Four degrees of freedom
In nature and human society, humans can not reach the place and special occasions may endanger human life, such as websites, many areas such as disaster relief.
continuous exploration on these complex environment often requires the intervention of robot. Micro walking robot is an important branch of robot,walking robots and more than six feet, compared to the Eight Legged Robot, because of strong bearing capacity, good stability, has the advantages of simple.
This paper mainly to the four bar mechanism as the main execution elements to design of micro walking the whole scheme of the four bar mechanism. The mechanism uses diagonal consistent principle, through the crank rocker mechanism to drive the motion of the legs, left front leg and the right foreleg consistent action,.it is the concrete embodiment of linkage curve feature, when the curve trajectory diagonal straight line segment, the robot on the ground is fixed, the motion trajectory when the diagonal curve is slanting line do the walking motion, robot. The miniature walking robot is mainly driven by DC servo motor, so as to drive the leg action driven synchronous belt wheel by a crank and rocker mechanism.
Key word: pneumatic manipulator;cylinder;pneumatic loop;Four degrees of freedom
目 录
摘 要 i
ABSTRACT ii
目 录 iii
1绪论 1
2 课题的来源与研究的目的和意义 2
3 本课题研究的内容 9
4 Solidworks设计基础 4
4.1.1 草图绘制 5
4.1.2 基准特征,参考几何体的创建 6
4.1.3 拉伸、旋转、扫描和放样特征建 7
4.1.4 工程图的设计 10
4.1.5 装配设计 11
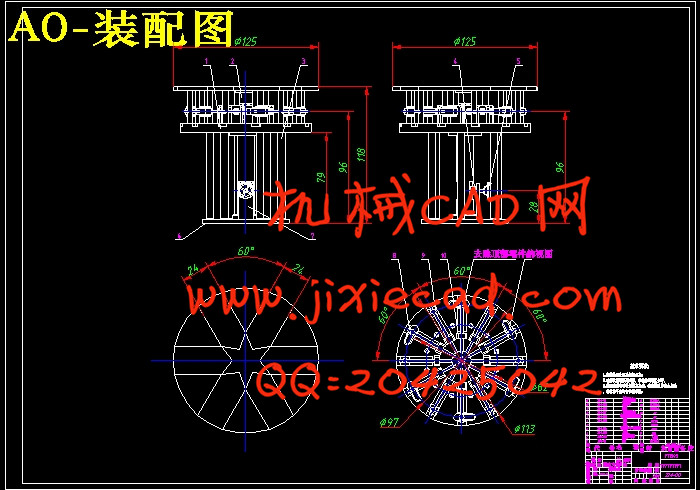
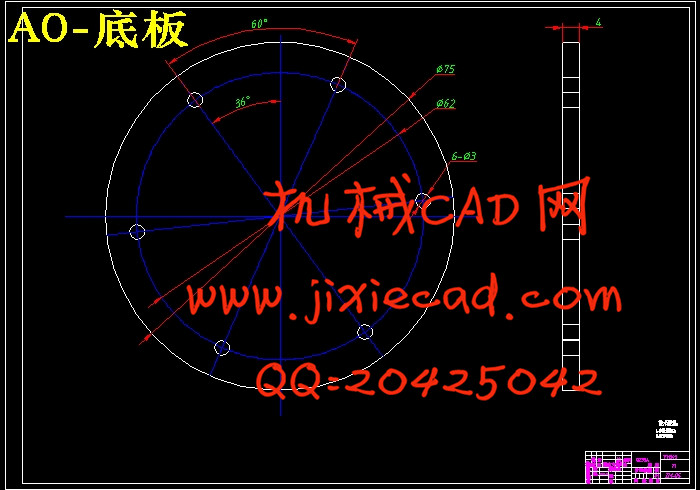
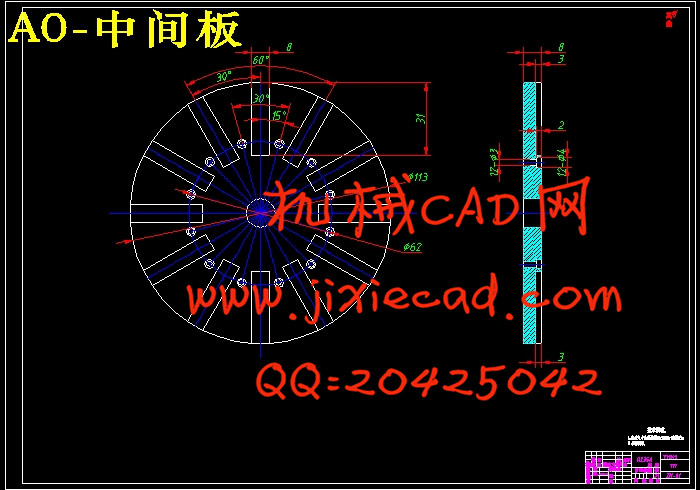
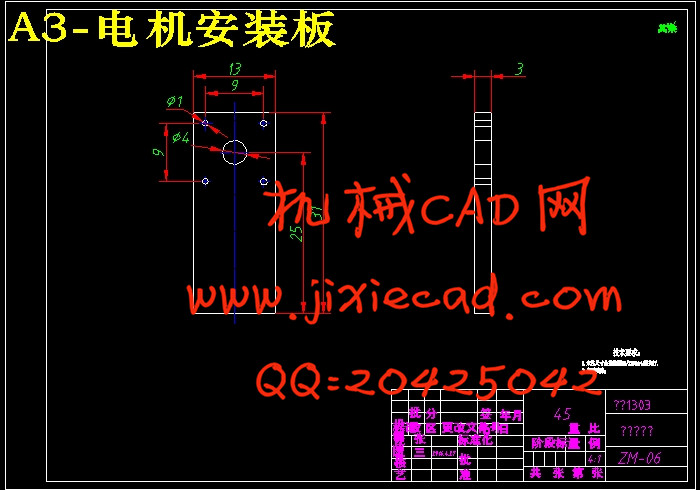
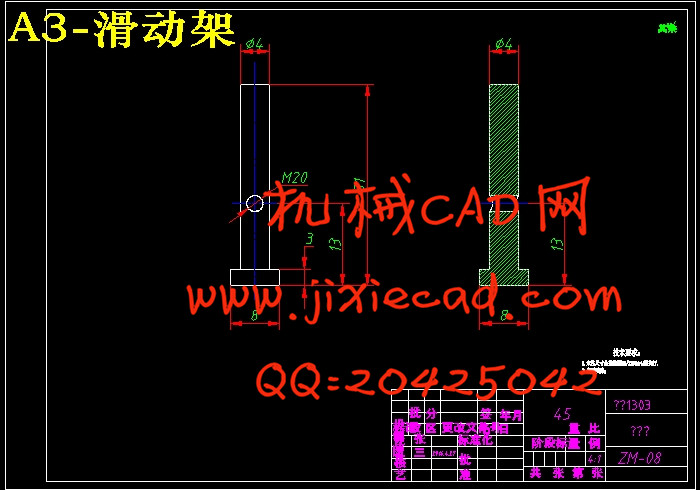
5 基于缩放变形机构的桌面装饰机械总体结构的设计 12
5.1 桌面装饰机械的总体方案图 12
5.2 桌面装饰机械的工作原理 15
5.3 机械传动部分的设计计算 17
5 .3.1伺服电机的选型计算 18
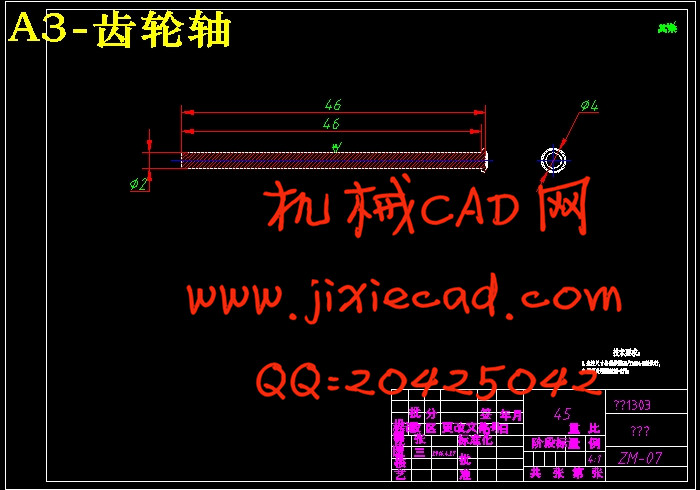
5.3.2转动轴的设计计算 19
5.3.3轴承的设计计算 21
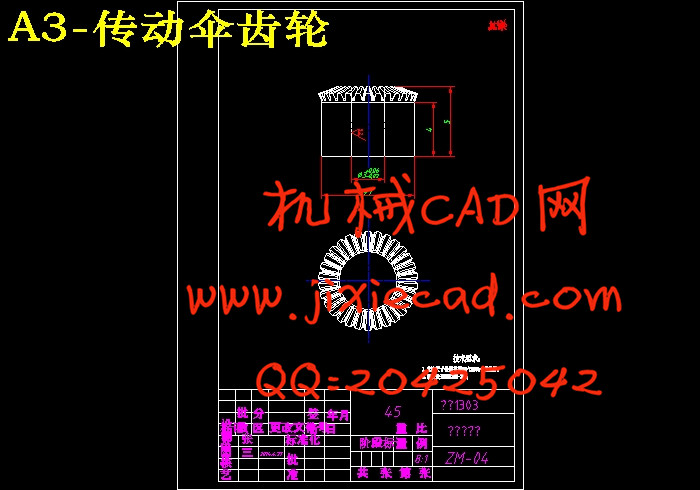
5.3.4 齿轮传动的设计计算 25
6 各主要零部件强度的校核 25
6.1 轴的校核计算 26
6.2 伞齿轮的校核计算 26
结论 27
致 谢 25
参考文献 29