设计简介
摘 要
机器人是一种能够模仿人类动作的机器,它可以完成许多对人类来说危险且单调的工作,机器人让人类从繁重、单调的工作中解脱出来。它们从事固定而有规律的工作,例如工业生产中的焊接、喷漆等等。
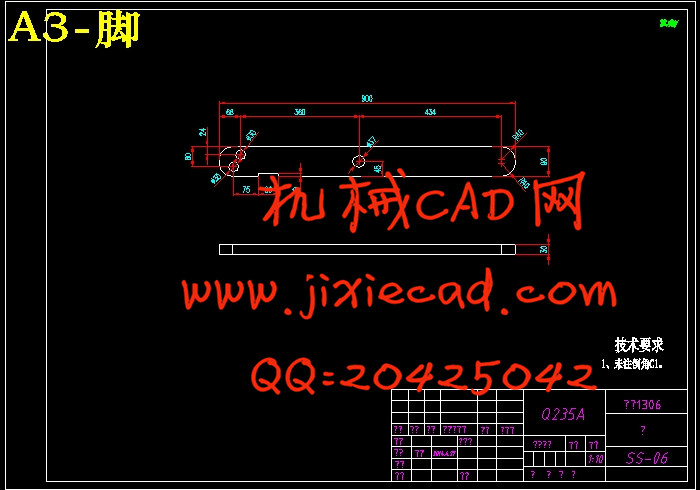
本文主要以电动推杆作为主要执行元件来设计载人三自由度三角形机器人的整体方案。该机构采用统一动作、协调控制的原则,通过推杆的行程的打开来实现机器人脚的运动,通过中控系统的控制来实现载人三自由度三角形机器人的动作,由于是中控系统控制,所以控制灵活,多样。人可以坐在机器人上面,通过控制器来控制机器人的动作,实现一些人类靠自己脚力无法完成的功能。
关键词:机器人;工作;控制;三自由度三角形机器人
机器人是一种能够模仿人类动作的机器,它可以完成许多对人类来说危险且单调的工作,机器人让人类从繁重、单调的工作中解脱出来。它们从事固定而有规律的工作,例如工业生产中的焊接、喷漆等等。
本文主要以电动推杆作为主要执行元件来设计载人三自由度三角形机器人的整体方案。该机构采用统一动作、协调控制的原则,通过推杆的行程的打开来实现机器人脚的运动,通过中控系统的控制来实现载人三自由度三角形机器人的动作,由于是中控系统控制,所以控制灵活,多样。人可以坐在机器人上面,通过控制器来控制机器人的动作,实现一些人类靠自己脚力无法完成的功能。
关键词:机器人;工作;控制;三自由度三角形机器人
ABSTRACT
A robot is a machine which can imitate human actions, it can finish a lot of human risk and monotonous work, let the human robot free out from the heavy, monotonous work. They engaged in regular work, such as industrial production welding, painting and so on.
The overall scheme of this paper to the electric push rod as the main component to design manned three degree of freedom triangular robot. The mechanism adopts the unified action, the coordinated control principle, by opening the travel of the push rod to realize the robot foot movement, to achieve a manned with three degrees of freedom robot motion control in the triangle by control system, the control system to control, so the control of flexible, multi sample. People can sit on the robot, the controller is adopted to control the robot's movement, the realization of some people rely on their own to complete the function of the leg muscles.
Key word: Robot;cylinder;pneumatic loop;Four degrees of freedom
目 录
摘 要 iA robot is a machine which can imitate human actions, it can finish a lot of human risk and monotonous work, let the human robot free out from the heavy, monotonous work. They engaged in regular work, such as industrial production welding, painting and so on.
The overall scheme of this paper to the electric push rod as the main component to design manned three degree of freedom triangular robot. The mechanism adopts the unified action, the coordinated control principle, by opening the travel of the push rod to realize the robot foot movement, to achieve a manned with three degrees of freedom robot motion control in the triangle by control system, the control system to control, so the control of flexible, multi sample. People can sit on the robot, the controller is adopted to control the robot's movement, the realization of some people rely on their own to complete the function of the leg muscles.
Key word: Robot;cylinder;pneumatic loop;Four degrees of freedom
目 录
ABSTRACT ii
目 录 iii
1 绪论 1
1.1 机器人简史 3
1.2 应用机器人的意义 6
1.3 本课题研究的内容 9
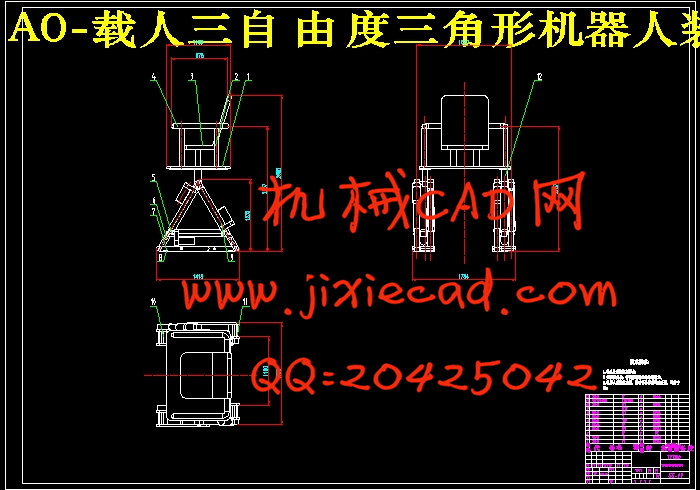
2 载人三自由度三角形机器人总体方案结构的设计 12
2.1 载人三自由度三角形机器人的总体方案图 12
2.2 载人三自由度三角形机器人的工作原理 12
3 机械结构的设计 13
3.1电动推杆的定义 14
3.2电动推杆的主要结构 15
3.3电动推杆的设计计算 16
3.4 连接轴的设计 17
4 各主要零部件强度的校核 18
4.1 连接轴轻度的校核 19
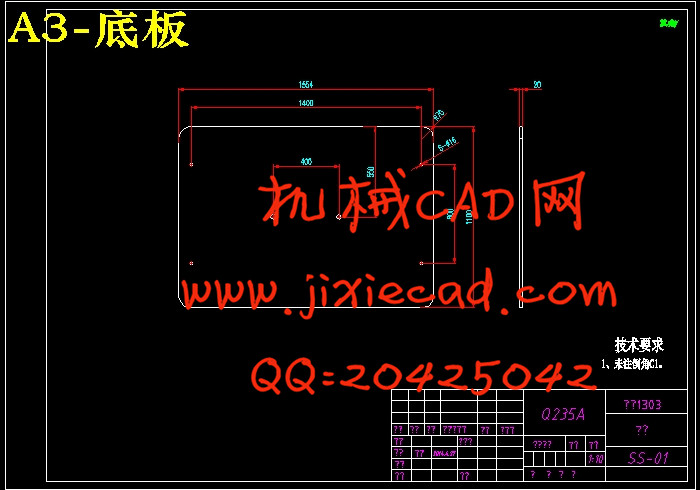
4.2 底板强度的校核 19
5 载人三自由度三角形机器人的三维建模 20
5.1 电动推杆的三维建模 23
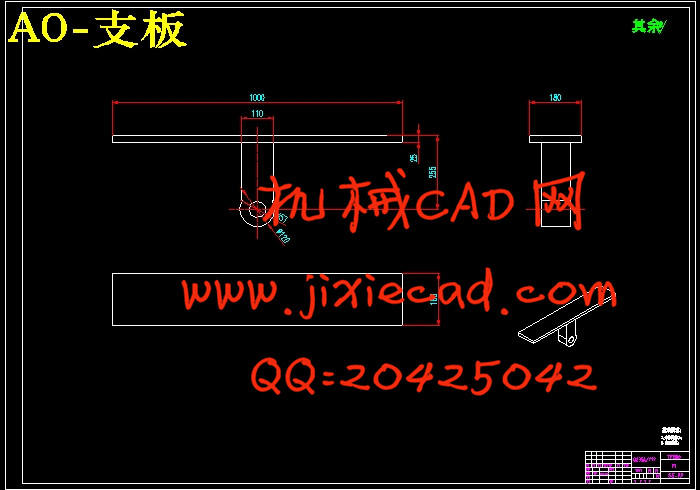
5.2 支板的三维建模 24
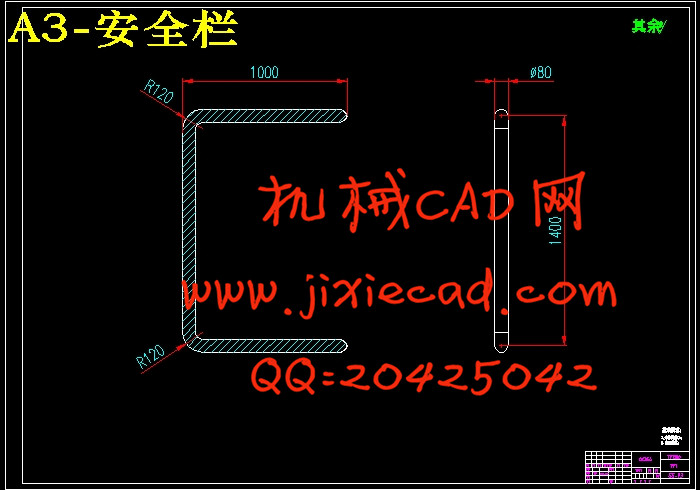
5.3 安全栏的三维建模 25
5.4 载人三自由度三角形机器人的三维建模 25
6 三维软件设计总结 26
结论 28
致 谢 29
参考文献 38