设计简介
摘 要
机械工业是一个国家的重要产业,机械工业的发展无时不刻都在影响着国家经济的发展,人类的进步离不开机械工业的发展。在全球经济发展的大环境下,中国各个行业被其他国家的先进技术影响的同时,越来越多的外国企业和品牌传播到中国已经成为现实。在新的市场需求的推动下,对采煤机摇臂低速区轴承进行改良和优化是当务之急。有大型采煤机设备企业对设备的安全指标的有着一定生产的严格要求。在生产设备的企业,充分考虑到在设备运行中可能出现的问题,从而减少噪声污染引起的振动或不当操作设备的现象等。国内采煤机摇臂低速区轴承的研发及制造要与全球号召的低效经济、安全稳定主题保持一致。采煤机摇臂低速区轴承的发展与人类社会的进步和科学技术的水平密切相关。
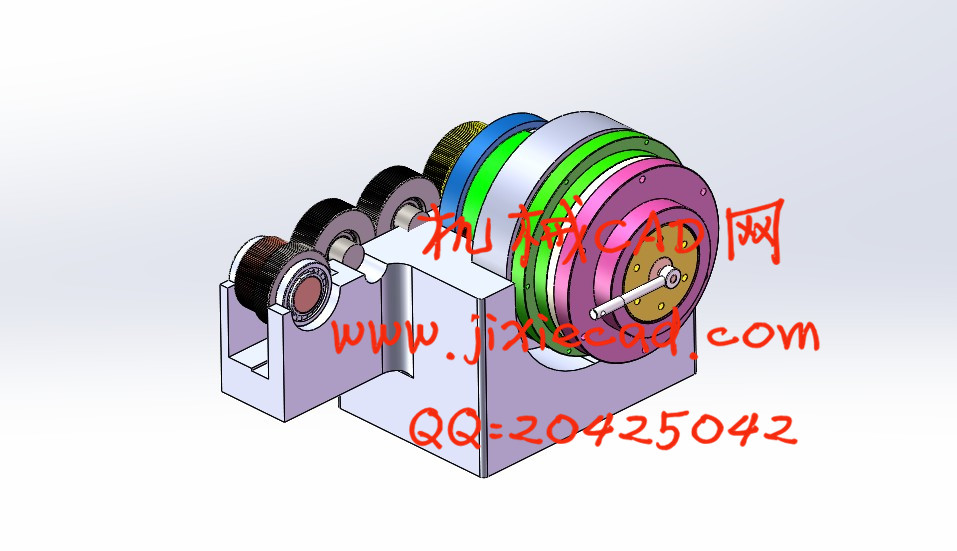
本次设计的题目是采煤机摇臂低速区轴承振动特性与故障分析,在设计过程中,主要对采煤机摇臂低速去轴承结构方案的确定和相关组件的计算和设计,重点完成了采煤机摇臂低速区轴承振动特性与故障分析。首先,完成了对摇臂减速器的传动比分配,转速及传递功率的计算,其次,完成了采煤机摇臂壳体内一轴、二轴、三轴、四轴、五轴和各轴传动齿轮的设计及校核,简单介绍了行星轮系的装配关系确定和强度校核。再次,重点对摇臂低速区轴承的振动特性进行详细分析。最后,对采煤机摇臂低速区轴承进行了三维建模,有限元分析。
关键词:机械工业;采煤机摇臂低速区轴承;设计;有限元分析;
Abstract
With development of all kind of science technology and global economy, Pneumatic manipulator is a automated devices that can mimic the human hand and arm movements to do something,aslo can according to a fixed procedure to moving objects or control tools. It can replace the heavy labor in order to achieve the production mechanization and automation, and can work in dangerous working environments to protect the personal safety.Therefore widely used in machine building, metallurgy, electronics, light industry and atomic energy sectors.The pneumatic part of the design is primarily to choose the right atcompressedneceengththdirectionprocedurework.
The inverted pendulum is a typical high order system, with multi variable, non-linear, strong-coupling, fleet and absolutely instable. It is representative as an ideal model to prove new control theory and techniques. During the control process, pendulum can effectively reflect many key problems such as equanimity, robust, follow-up and track, therefore.This paper studies a control method of double inverted pendulum . First of all, the mathematical model of the double inverted pendulum is established, then make a control design to double inverted pendulum on the mathematical model, and determine the system performance index weightmatrix , by using genetic algorithm in order to attain the system state feedback control matrix. Finally, the simulation of the system is made by .
Key word: pneumatic manipulator cylinder pneumatic loop Fout degrees of freedom.
目 录
1 绪论 1
1.1 课题的来源与研究的目的和意义 1
1.2 采煤机械化的发展与趋势 2
1.3 本课题研究的内容 3
2 摇臂整体方案确定 5
2.1 采煤机的分类 5
2.2 采煤机的工作原理 5
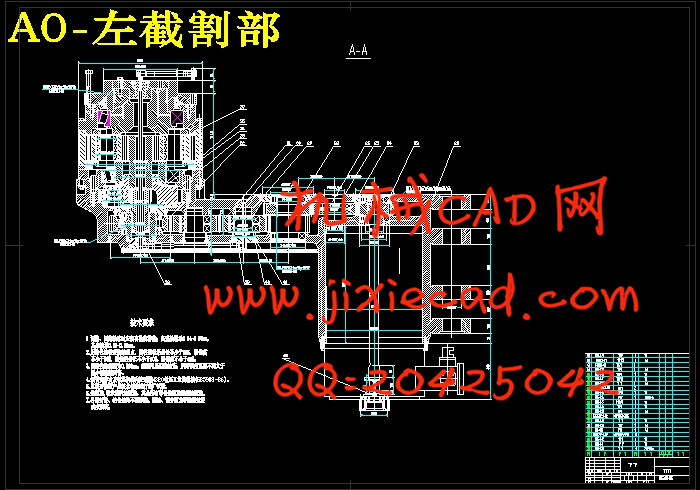
2.3摇臂具体结构设计方案的确定 7
3 传动系统设计 13
3.1各级传动转速、功率、转矩的确定 13
3.2 齿轮设计及强度效核 14
3.3 行星齿轮的计算 18
3.3.1 配齿计算 22
3.3.2 几何尺寸计算 22
3.3.3 装配条件验算 26
3.4行星轴的设计计算 27
3.4.1 初算轴的最小直径 28
3.4.2 输入轴的设计 28
3.4.3 输出轴的设计 29
3.5轴的设计校核与轴承选用 29
3.5.1Ⅳ轴的设计及强度效核 29
3.5.2Ⅲ轴的设计及强度效核 43
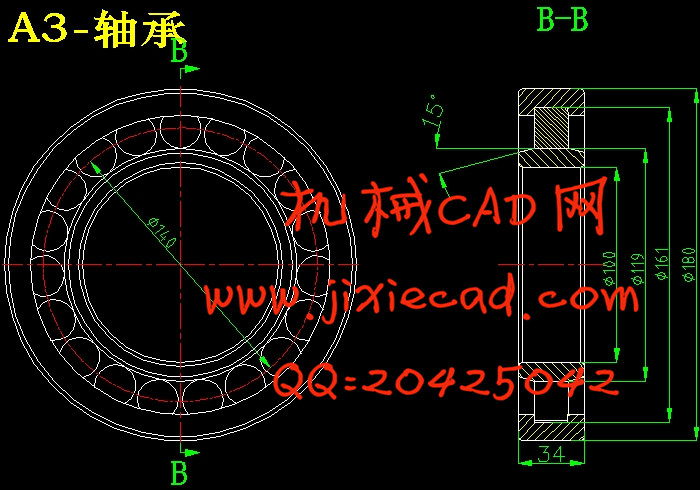
3.6 轴承的寿命校核 53
结论 54
参考文献 55
致 谢 56
机械工业是一个国家的重要产业,机械工业的发展无时不刻都在影响着国家经济的发展,人类的进步离不开机械工业的发展。在全球经济发展的大环境下,中国各个行业被其他国家的先进技术影响的同时,越来越多的外国企业和品牌传播到中国已经成为现实。在新的市场需求的推动下,对采煤机摇臂低速区轴承进行改良和优化是当务之急。有大型采煤机设备企业对设备的安全指标的有着一定生产的严格要求。在生产设备的企业,充分考虑到在设备运行中可能出现的问题,从而减少噪声污染引起的振动或不当操作设备的现象等。国内采煤机摇臂低速区轴承的研发及制造要与全球号召的低效经济、安全稳定主题保持一致。采煤机摇臂低速区轴承的发展与人类社会的进步和科学技术的水平密切相关。
本次设计的题目是采煤机摇臂低速区轴承振动特性与故障分析,在设计过程中,主要对采煤机摇臂低速去轴承结构方案的确定和相关组件的计算和设计,重点完成了采煤机摇臂低速区轴承振动特性与故障分析。首先,完成了对摇臂减速器的传动比分配,转速及传递功率的计算,其次,完成了采煤机摇臂壳体内一轴、二轴、三轴、四轴、五轴和各轴传动齿轮的设计及校核,简单介绍了行星轮系的装配关系确定和强度校核。再次,重点对摇臂低速区轴承的振动特性进行详细分析。最后,对采煤机摇臂低速区轴承进行了三维建模,有限元分析。
关键词:机械工业;采煤机摇臂低速区轴承;设计;有限元分析;
Abstract
With development of all kind of science technology and global economy, Pneumatic manipulator is a automated devices that can mimic the human hand and arm movements to do something,aslo can according to a fixed procedure to moving objects or control tools. It can replace the heavy labor in order to achieve the production mechanization and automation, and can work in dangerous working environments to protect the personal safety.Therefore widely used in machine building, metallurgy, electronics, light industry and atomic energy sectors.The pneumatic part of the design is primarily to choose the right atcompressedneceengththdirectionprocedurework.
The inverted pendulum is a typical high order system, with multi variable, non-linear, strong-coupling, fleet and absolutely instable. It is representative as an ideal model to prove new control theory and techniques. During the control process, pendulum can effectively reflect many key problems such as equanimity, robust, follow-up and track, therefore.This paper studies a control method of double inverted pendulum . First of all, the mathematical model of the double inverted pendulum is established, then make a control design to double inverted pendulum on the mathematical model, and determine the system performance index weightmatrix , by using genetic algorithm in order to attain the system state feedback control matrix. Finally, the simulation of the system is made by .
Key word: pneumatic manipulator cylinder pneumatic loop Fout degrees of freedom.
目 录
1 绪论 1
1.1 课题的来源与研究的目的和意义 1
1.2 采煤机械化的发展与趋势 2
1.3 本课题研究的内容 3
2 摇臂整体方案确定 5
2.1 采煤机的分类 5
2.2 采煤机的工作原理 5
2.3摇臂具体结构设计方案的确定 7
3 传动系统设计 13
3.1各级传动转速、功率、转矩的确定 13
3.2 齿轮设计及强度效核 14
3.3 行星齿轮的计算 18
3.3.1 配齿计算 22
3.3.2 几何尺寸计算 22
3.3.3 装配条件验算 26
3.4行星轴的设计计算 27
3.4.1 初算轴的最小直径 28
3.4.2 输入轴的设计 28
3.4.3 输出轴的设计 29
3.5轴的设计校核与轴承选用 29
3.5.1Ⅳ轴的设计及强度效核 29
3.5.2Ⅲ轴的设计及强度效核 43
3.6 轴承的寿命校核 53
结论 54
参考文献 55
致 谢 56