设计简介
摘 要
轮足复合式机器人是高科技产品的典型,是人们设置指定的程序通过中控系统实现机器人横移、越障或爬坡,跨沟、转弯等多种功能的高科技智能化产品。它可代替人类在某些领域力所不能及的地方实现特定的任务和功能,能在有害环境下代替人类工作,侦查,排险等,因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门。
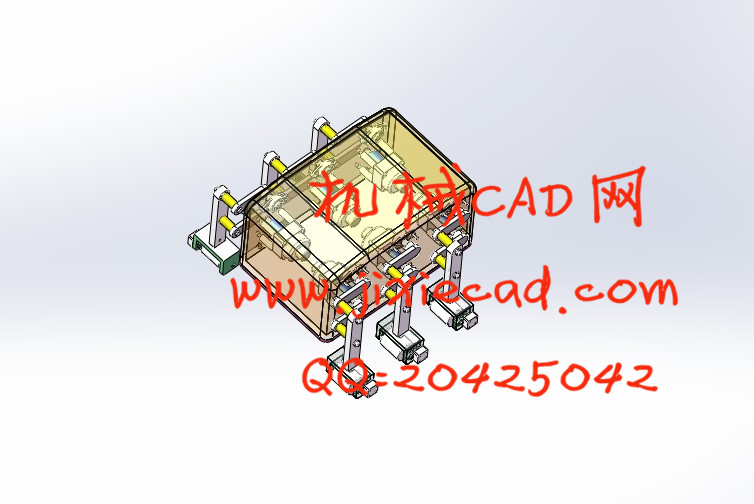
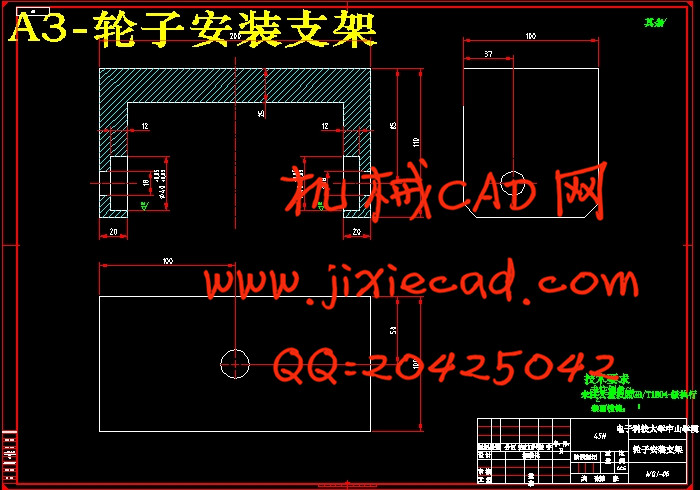
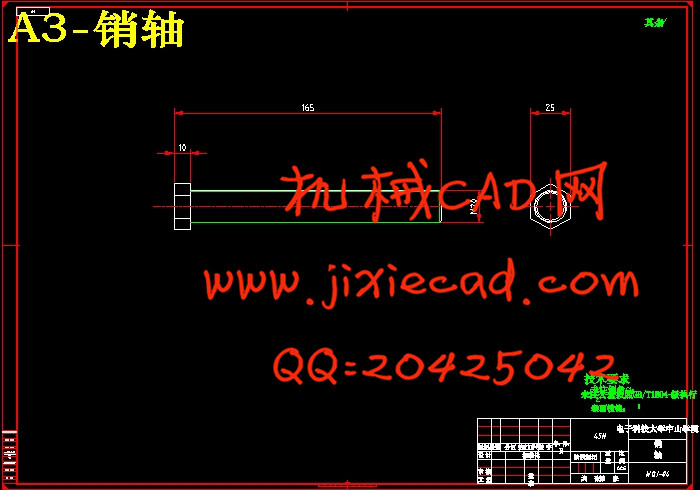
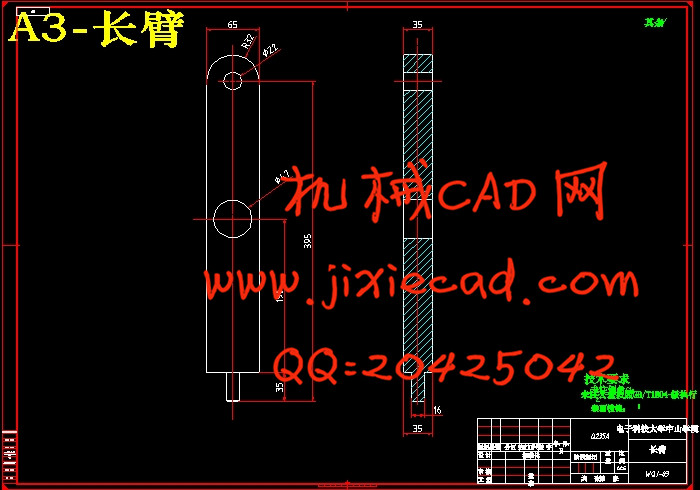
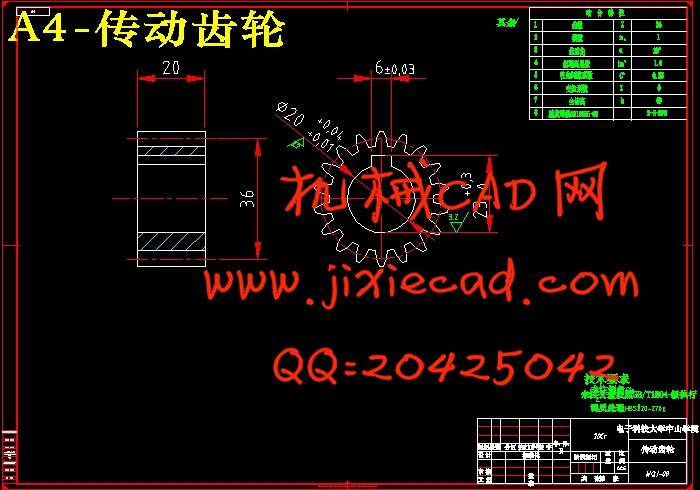
本文主要进行了轮足复合式机器人的总体结构设计和控制系统设计。轮足复合式机器人的机械结构由直流电机、编码器和短臂、长臂、轮子等部分组成,可按预定程序运动,实现横移、越障、爬坡、跨沟、转弯等功能。控制系统部分的设计主要是选择合适的PLC中控系统,设计合理的PLC控制流程图,通过中控系统调节各个直流电机的转速来使轮足复合式机器人实现移动,爬坡,拐弯,越障等功能。
关键词:轮足复合式机器人;智能化;控制系统;越障
轮足复合式机器人是高科技产品的典型,是人们设置指定的程序通过中控系统实现机器人横移、越障或爬坡,跨沟、转弯等多种功能的高科技智能化产品。它可代替人类在某些领域力所不能及的地方实现特定的任务和功能,能在有害环境下代替人类工作,侦查,排险等,因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门。
本文主要进行了轮足复合式机器人的总体结构设计和控制系统设计。轮足复合式机器人的机械结构由直流电机、编码器和短臂、长臂、轮子等部分组成,可按预定程序运动,实现横移、越障、爬坡、跨沟、转弯等功能。控制系统部分的设计主要是选择合适的PLC中控系统,设计合理的PLC控制流程图,通过中控系统调节各个直流电机的转速来使轮足复合式机器人实现移动,爬坡,拐弯,越障等功能。
关键词:轮足复合式机器人;智能化;控制系统;越障
ABSTRACT
Pneumatic manipulator is a automated devices that can mimic the human hand and arm movements to do something,aslo can according to a fixed procedure to moving objects or control tools. It can replace the heavy labor in order to achieve the production mechanization and automation, and can work in dangerous working environments to protect the personal safety, Therefore widely used in machine building, metallurgy, electronics, light industry and atomic energy sectors.
This article is mainly of the pneumatic manipulator the overall design, and pneumatic design. This mechanism of manipulator includes cylinders and claws and connectors parts, it can move according to the due track on the movement of grabbing, carrying and unloading. The pneumatic part of the design is primarily to choose the right valves and design a Plc reasonable pneumatic control loop, by controlling and regulating pressure, flow and direction of the compressed air to make it get the necessary strength, speed and changed the direction of movement in the prescribed procedure work.
Key word: pneumatic manipulator;cylinder;pneumatic loop;Four degrees of freedom
目 录
摘 要 iPneumatic manipulator is a automated devices that can mimic the human hand and arm movements to do something,aslo can according to a fixed procedure to moving objects or control tools. It can replace the heavy labor in order to achieve the production mechanization and automation, and can work in dangerous working environments to protect the personal safety, Therefore widely used in machine building, metallurgy, electronics, light industry and atomic energy sectors.
This article is mainly of the pneumatic manipulator the overall design, and pneumatic design. This mechanism of manipulator includes cylinders and claws and connectors parts, it can move according to the due track on the movement of grabbing, carrying and unloading. The pneumatic part of the design is primarily to choose the right valves and design a Plc reasonable pneumatic control loop, by controlling and regulating pressure, flow and direction of the compressed air to make it get the necessary strength, speed and changed the direction of movement in the prescribed procedure work.
Key word: pneumatic manipulator;cylinder;pneumatic loop;Four degrees of freedom
目 录
ABSTRACT ii
目 录 iii
1 绪论 1
1.1课题的来源与研究的目的和意义 2
1.2 轮足式复合机器人的研究现状 4
1.2.1 轮足式复合机器人的结构的研究现状 5
1.2.2 轮足式复合机器人控制系统的研究现状 7
1.3本课题研究的内容 9
2 轮足复合式机器人总体方案结构的设计 12
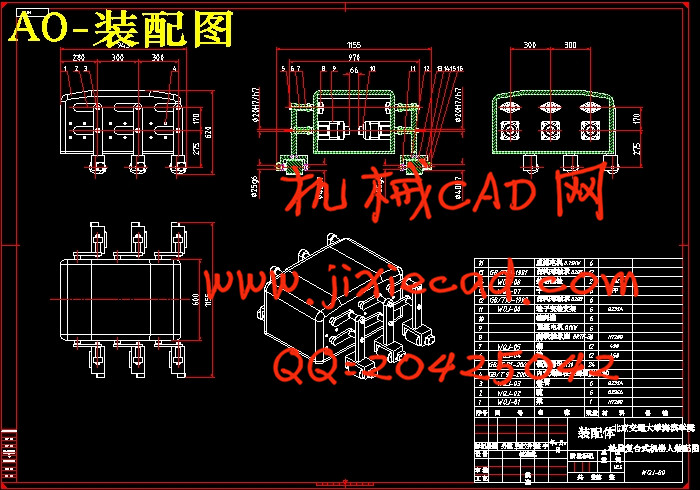
2.1 轮足复合式机器人的总体方案图 12
2.2 轮足的布置形式 14
2.3 轮足的结构方案 14
2.4越障机构的设计 14
2.5 轮足的布置形式 14
2.6越障机构的设计 14
3 驱动装置的设计 18
3.1车轮电机的选型计算 20
3.2离合器的选型计算 20
3.3轴承的选型计算 20
3.4平键的选型计算 20
4 轮足复合式机器人的三维结构设计 21
4.1 Solidworks设计基础 21
4.1.2 草图绘制 21
4.1.3 基准特征,参考几何体的创建 21
4.1.4 拉伸、旋转、扫描和放样特征建 22
4.4.4 工程图的设计 22
4.4.5 装配设计 22
4.2轮子电机的三维建模 22
4.3轮足组件的三维建模 23
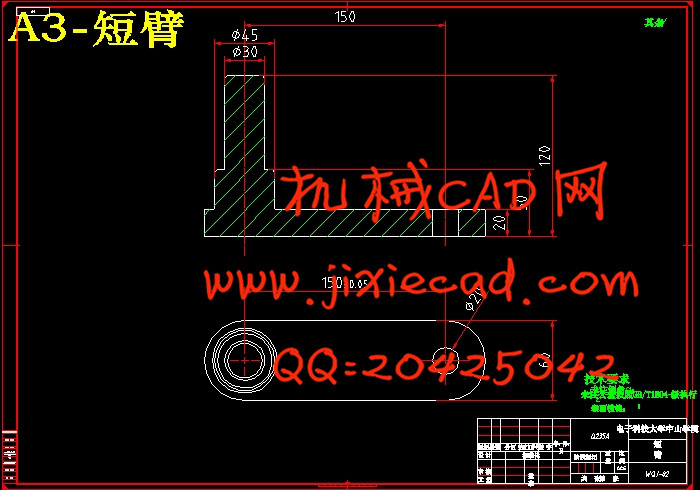
4.4短臂的三维建模 24
4.5轮足复合式机器人的三维建模 24
4.6三维软件设计总结 25
结论 26
致 谢 26
参考文献 27
附录 一 32
附录 二 36