设计简介
摘要
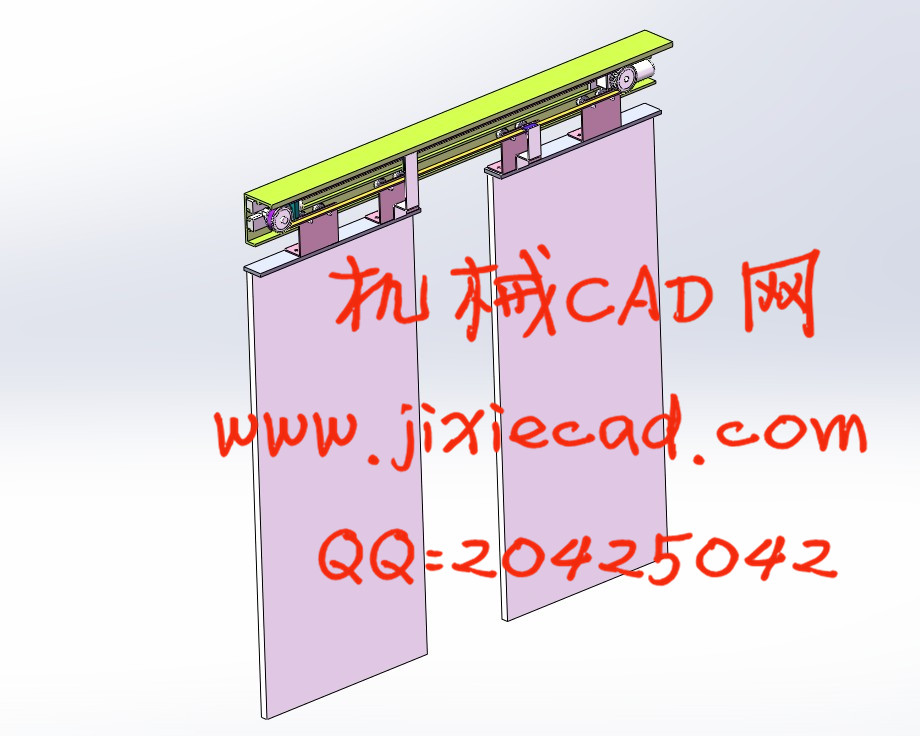
自动门作为单片机控制的典型,广泛应用于各种地方,随着科技的发展,传动图的手拉门已经将会逐渐淘汰,新型的自动门将会越来越广泛地得到应用。如今伴随着信息时代的到来,人们的生活水平日益提高,方便、快捷、 自动、智能成为时代的主题,在现代超市、办公楼等等环境中,门控系统早已不仅仅局限在物理空间上,人们更为关注的是一个安全、方便、舒适的环境,自动化的电子产品自然成为人们追求的目标。
本设计将以单片机为核心设计了系统结构图、程序指令、流程图等等,在保留了原始门控系统的基本功能的同时又增加了一系列的实用功能并简化其电路结构,其将以控制方便,灵活,只要改变输入单片机的控制程序,便可控制门的关闭和开合,从而使得人们的在超市购物,在办公楼办公的环境不断完美,不断智能化。通过对基于单片机的自动门的设计,我们得出了该自动门具有反映灵敏、高效、智能化的结论。
关键词 单片机;控制系统;可靠性;系统
自动门作为单片机控制的典型,广泛应用于各种地方,随着科技的发展,传动图的手拉门已经将会逐渐淘汰,新型的自动门将会越来越广泛地得到应用。如今伴随着信息时代的到来,人们的生活水平日益提高,方便、快捷、 自动、智能成为时代的主题,在现代超市、办公楼等等环境中,门控系统早已不仅仅局限在物理空间上,人们更为关注的是一个安全、方便、舒适的环境,自动化的电子产品自然成为人们追求的目标。
本设计将以单片机为核心设计了系统结构图、程序指令、流程图等等,在保留了原始门控系统的基本功能的同时又增加了一系列的实用功能并简化其电路结构,其将以控制方便,灵活,只要改变输入单片机的控制程序,便可控制门的关闭和开合,从而使得人们的在超市购物,在办公楼办公的环境不断完美,不断智能化。通过对基于单片机的自动门的设计,我们得出了该自动门具有反映灵敏、高效、智能化的结论。
关键词 单片机;控制系统;可靠性;系统
ABSTRACT
Pneumatic manipulator is a automated devices that can mimic the human hand and arm movements to do something,aslo can according to a fixed procedure to moving objects or control tools. It can replace the heavy labor in order to achieve the production mechanization and automation, and can work in dangerous working environments to protect the personal safety, Therefore widely used in machine building, metallurgy, electronics, light industry and atomic energy sectors.
This article is mainly of the pneumatic manipulator the overall design, and pneumatic design. This mechanism of manipulator includes cylinders and claws and connectors parts, it can move according to the due track on the movement of grabbing, carrying and unloading. The pneumatic part of the design is primarily to choose the right valves and design a reasonable pneumatic control loop, by controlling and regulating pressure, flow and direction of the compressed air to make it get the necessary strength, speed and changed the direction of movement in the prescribed procedure work.It can replace the heavy labor in order to achieve the production mechanization and automation, and can work in dangerous working environments to protect the personal safety, Therefore widely used in machine building, metallurgy, electronics, light industry and atomic .The principle, technical pare-maters, transmiting system and main parts structure of mincing ma-chine were introduced.The productingcapacity was analysed.Keywords Mincing machine Holds plate.
Keywords industrial robot Forging machine loading manipulator cobit
目 录
Pneumatic manipulator is a automated devices that can mimic the human hand and arm movements to do something,aslo can according to a fixed procedure to moving objects or control tools. It can replace the heavy labor in order to achieve the production mechanization and automation, and can work in dangerous working environments to protect the personal safety, Therefore widely used in machine building, metallurgy, electronics, light industry and atomic energy sectors.
This article is mainly of the pneumatic manipulator the overall design, and pneumatic design. This mechanism of manipulator includes cylinders and claws and connectors parts, it can move according to the due track on the movement of grabbing, carrying and unloading. The pneumatic part of the design is primarily to choose the right valves and design a reasonable pneumatic control loop, by controlling and regulating pressure, flow and direction of the compressed air to make it get the necessary strength, speed and changed the direction of movement in the prescribed procedure work.It can replace the heavy labor in order to achieve the production mechanization and automation, and can work in dangerous working environments to protect the personal safety, Therefore widely used in machine building, metallurgy, electronics, light industry and atomic .The principle, technical pare-maters, transmiting system and main parts structure of mincing ma-chine were introduced.The productingcapacity was analysed.Keywords Mincing machine Holds plate.
Keywords industrial robot Forging machine loading manipulator cobit
目 录
1绪论.......................................................................................................................1
1.1自动门的发展现状及应用.............................................................................2
1.2国内外发展状况.. .......................................................................................................3
1.3课题的提出及主要任务……………………………………………….........6
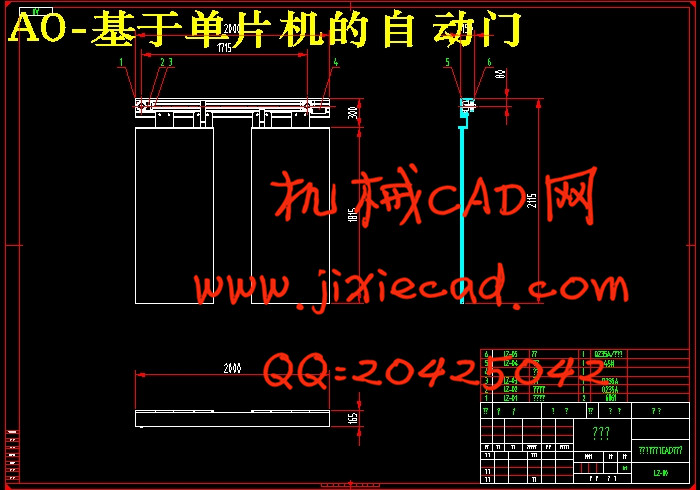
2 机械传动部分的设计计算…………………………………………….............17
2.1 电机的选型计算…………………………………………….......................18
2.2 同步带轮传动的设计计算…………………………………………….......18
3 自动门控制系统方案的设计……………………………………………..........9
3.1单片机的作用和功能………………………………………........................14
3.2单片机的应用场合………………………………………............................14
3.3传感器的工作原理………………………………………............................15
3.4故障检测及显示系统的构成………………………………………............16
3.5门开合行程的检测………………………………………............................17
4 硬件系统的设计…………………………………………….............................21
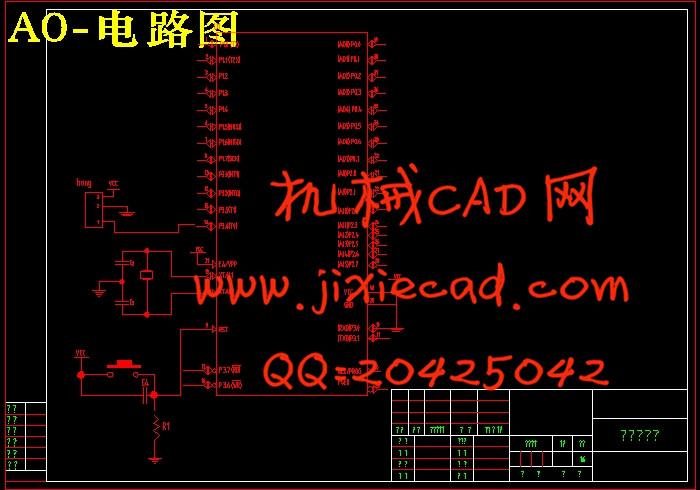
4.1电路电框图的确定……………………………………………………........22
4.2 硬件系统总体逻辑图的设计………………………………………...........22
4.3 电路原理图的确定………………………………………...........................22
5 系统软件的设计…………………………………………….............................23
5.1系统主程序流程图的确定………………………………............................23
5.2开门子程序流程图的确定…………………………………........................24
5.3 开门中断程序流程图的确定………………………………………...........24
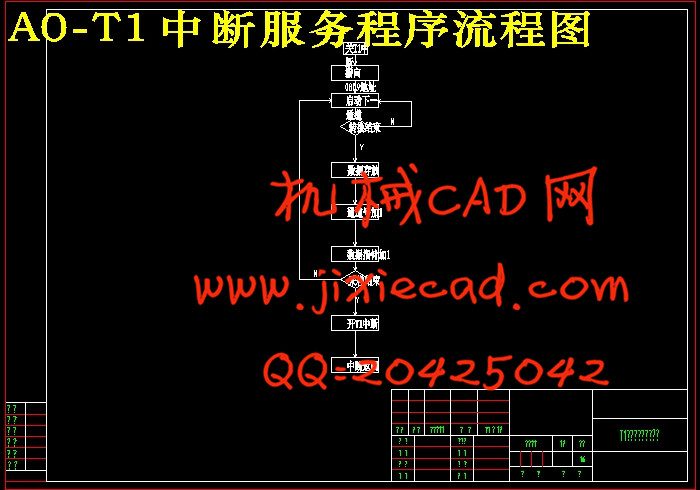
5.4 T1中断服务程序流程图的确定………………………………………......25
5.5 程序源代码的生成………………………………………...........................26
6 调试与检测……………………………………….............................................27
6.1 自动门控系统的调试……………………………………….......................27
6.2 自动门行程的检测………………………………………...........................28
结论………………………………………………………………….....................29
致谢…………………………………………………………………………….....30
参考文献………………………………………………………………………….31