设计简介
摘要
本文运用大学所学的知识,提出了自动堆垛式载运机器人的结构组成、工作原理以及主要零部件的设计中所必须的理论计算和相关强度校验,构建了自动堆垛式载运机器人总的指导思想,从而得出了该自动堆垛式载运机器人的优点是高效,经济,并且安全系数高,对提高货物搬运以及装配效率,减少人工投入等等起到了很大的作用的结论。
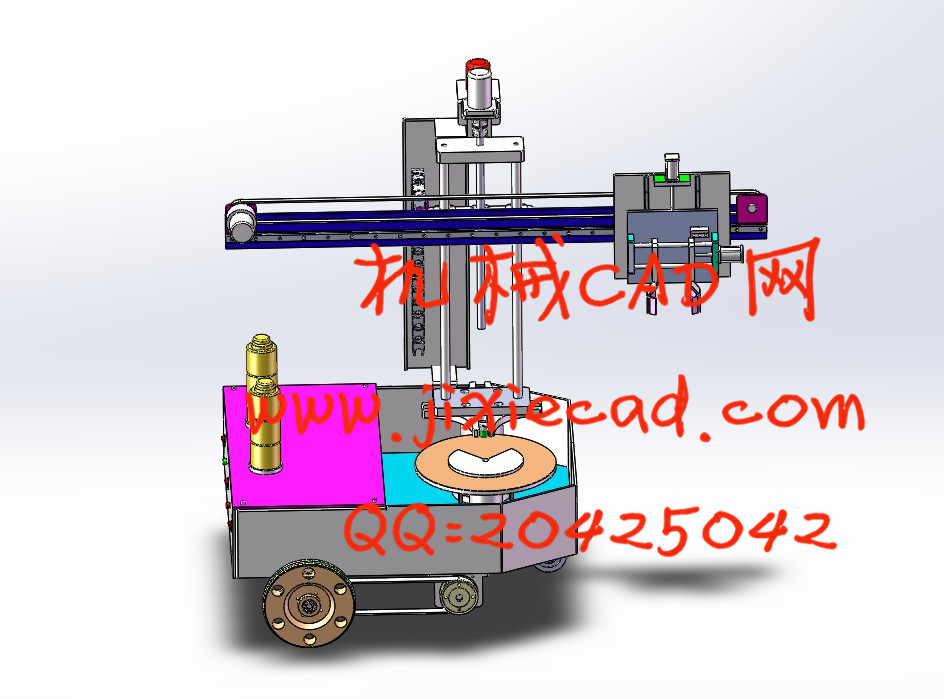
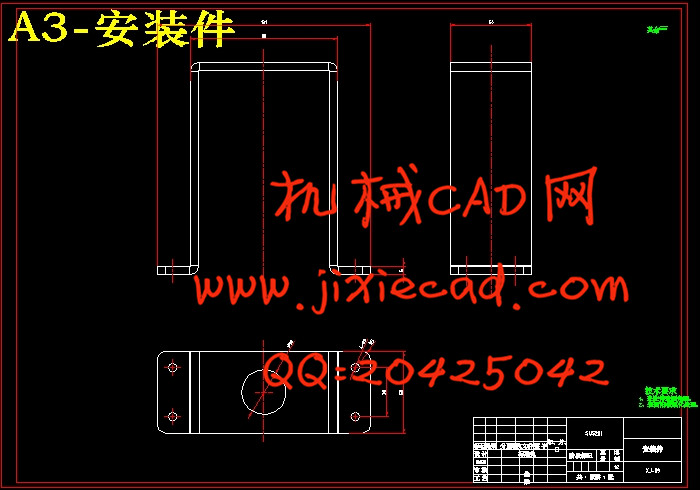
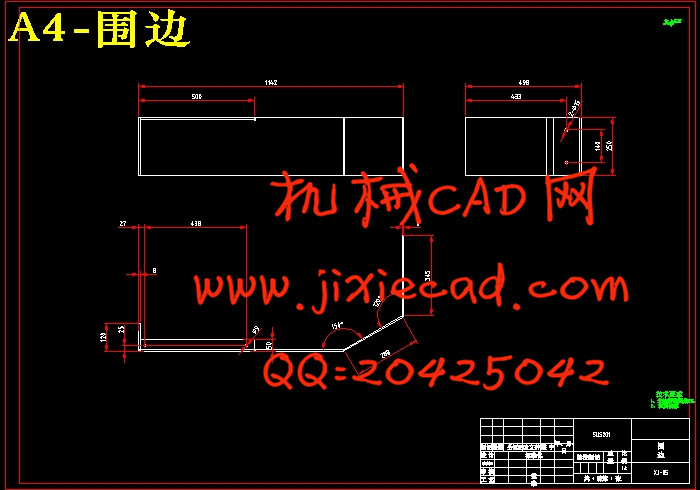
该自动堆垛式载运机器人是对传统的多自由度机器人的工作原理进行理解,本机器人由底盘、回转机构、升降机构、平移机构、手爪和驱动机构组成。该机器人能实现多个自由度,从而可以从多方位多角度来对货物进行搬运和卸载。
关键词:自动堆垛式载运机器人;计算;自由度;驱动机构;搬运
Abstract
本文运用大学所学的知识,提出了自动堆垛式载运机器人的结构组成、工作原理以及主要零部件的设计中所必须的理论计算和相关强度校验,构建了自动堆垛式载运机器人总的指导思想,从而得出了该自动堆垛式载运机器人的优点是高效,经济,并且安全系数高,对提高货物搬运以及装配效率,减少人工投入等等起到了很大的作用的结论。
该自动堆垛式载运机器人是对传统的多自由度机器人的工作原理进行理解,本机器人由底盘、回转机构、升降机构、平移机构、手爪和驱动机构组成。该机器人能实现多个自由度,从而可以从多方位多角度来对货物进行搬运和卸载。
关键词:自动堆垛式载运机器人;计算;自由度;驱动机构;搬运
Abstract
This paper is using the university knowledge, automatic stacker carrying robot structure composition, working principle and main parts design must have the theoretic calculation and strength check is proposed, constructed the general guiding principle of robot automatic stacker carrying, resulting in the the automatic stacker carrying advantage for the robot is efficient, economic, and high safety factor, to improve cargo handling and assembly efficiency, reduce artificial input and so on plays a great role in the conclusion.
The automatic stacking carrying robot is the working principle of traditional multi degree of freedom robot to understand, the robot is composed of a chassis, slewing mechanism, lifting mechanism, a translational mechanism, gripper and a driving mechanism. The robot can achieve multiple degrees of freedom, which can be from various angles to handling and unloading of goods.
Keywords: automatic stacker robot;carrying calculate;the degrees of freedom; drive mechanism for handling
目 录
摘要 IThe automatic stacking carrying robot is the working principle of traditional multi degree of freedom robot to understand, the robot is composed of a chassis, slewing mechanism, lifting mechanism, a translational mechanism, gripper and a driving mechanism. The robot can achieve multiple degrees of freedom, which can be from various angles to handling and unloading of goods.
Keywords: automatic stacker robot;carrying calculate;the degrees of freedom; drive mechanism for handling
目 录
Abstract II
1 绪论 1
1.1本课题研究的内容 1
1.2 机器人概述 2
1.3 机器人的组成和分类 3
1.3.1机器人的组成 3
1.3.2机器人的分类 4
2 自动堆垛式载运机器人结构的设计 5
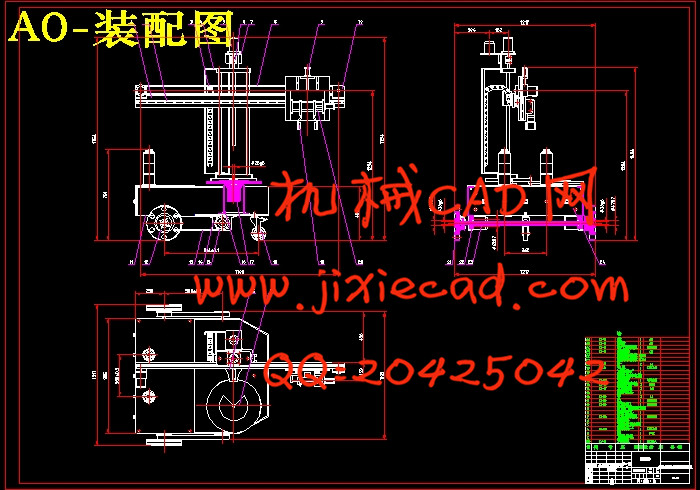
2.1自动堆垛式载运机器人总体方案图 7
2.2 自动堆垛式载运机器人的工作原理 9
2.3 机械传动部分的设计计算 10
2.3.1旋转电机的选型计算 10
2.3.2夹爪升降气缸的选型计算 10
2.3.3轴承的选型计算 11
2.3.4 滚动导轨的设计 12
3 各主要零件部强度的校核计算 12
3.1 键的设计及危险截面校核 13
3.2 轴承的选取及校核 14
3.3 螺栓的校核 14
4 机器人的PLC控制系统设计 15
4.1可编控制器的选择 16
4.2可编程控制器的使用步骤 17
结 论 18
致 谢 19
参考文献 20