设计简介
摘 要
本课题来源于当今社会机器人关节谐波传动装置的创新和更新换代基础之上,通过设计出CS20机型机器人关节谐波传动装置,从而来满足当今社会谐波传动装置运转精度不足的缺陷。
国内机器人关节谐波传动装置的研发及制造要与全球号召的高效经济、运转质量好,效率高等主题保持一致。近期对机械行业中机器人关节谐波传动装置的使用情况进行了调查,发现在机械行业中,谐波齿轮减速器的使用非常普遍,特别在机器人的柔性关节转动中,经常被用到。通过对CS20机型的机器人关节谐波传动装置进行设计,对之进行结构创新是当务之急。
本文运用大学所学的知识,首先从CS20机型机器人关节谐波传动装置的方案布局入手,通过查找相关资料,确定了本次设计的CS20机型机器人关节谐波传动装置的具体方案,然后再对它的具体内部结构进行设计,对其中常用的标准件例如轴承,轴,链传动机构进行选型设计,最后进行各主要零部件的强度校核。
关键词:机器人;谐波传动装置;结构;校核
本课题来源于当今社会机器人关节谐波传动装置的创新和更新换代基础之上,通过设计出CS20机型机器人关节谐波传动装置,从而来满足当今社会谐波传动装置运转精度不足的缺陷。
国内机器人关节谐波传动装置的研发及制造要与全球号召的高效经济、运转质量好,效率高等主题保持一致。近期对机械行业中机器人关节谐波传动装置的使用情况进行了调查,发现在机械行业中,谐波齿轮减速器的使用非常普遍,特别在机器人的柔性关节转动中,经常被用到。通过对CS20机型的机器人关节谐波传动装置进行设计,对之进行结构创新是当务之急。
本文运用大学所学的知识,首先从CS20机型机器人关节谐波传动装置的方案布局入手,通过查找相关资料,确定了本次设计的CS20机型机器人关节谐波传动装置的具体方案,然后再对它的具体内部结构进行设计,对其中常用的标准件例如轴承,轴,链传动机构进行选型设计,最后进行各主要零部件的强度校核。
关键词:机器人;谐波传动装置;结构;校核
Abstract
This topic comes from nowadays robot joint of the harmonic drive device innovation and renewal replacement based on, through the design of a CS20 models of robot joint harmonic driving device, thus to satisfy the defects of insufficient accuracy for today's society harmonic drive device operation.
The development and manufacture of the domestic robot joint harmonic drive device should be consistent with the global appeal of efficient economy, good operation quality and high efficiency. A recent use of machinery industry robot joint harmonic driving device were investigated. Found in the machinery industry, the harmonic gear deceleration is used very common, especially in the flexibility of robot joint rotation is often used. Through the design of the CS20 model of the robot joint harmonic drive device, the structure of the innovation is a priority.
In this paper, the knowledge learned in college, starting from the first CS20 models of robot joint harmonic drive device layout of, through the search for relevant information to determine the specific programs of the design of CS20 models of robot joint harmonic drive device, and then the concrete internal structure design, of which commonly used standard parts such as bearings, shaft, chain drive mechanism were design selection. Finally, the main components of the strength check.
Key words: robot; harmonic drive device; structure; check
This topic comes from nowadays robot joint of the harmonic drive device innovation and renewal replacement based on, through the design of a CS20 models of robot joint harmonic driving device, thus to satisfy the defects of insufficient accuracy for today's society harmonic drive device operation.
The development and manufacture of the domestic robot joint harmonic drive device should be consistent with the global appeal of efficient economy, good operation quality and high efficiency. A recent use of machinery industry robot joint harmonic driving device were investigated. Found in the machinery industry, the harmonic gear deceleration is used very common, especially in the flexibility of robot joint rotation is often used. Through the design of the CS20 model of the robot joint harmonic drive device, the structure of the innovation is a priority.
In this paper, the knowledge learned in college, starting from the first CS20 models of robot joint harmonic drive device layout of, through the search for relevant information to determine the specific programs of the design of CS20 models of robot joint harmonic drive device, and then the concrete internal structure design, of which commonly used standard parts such as bearings, shaft, chain drive mechanism were design selection. Finally, the main components of the strength check.
Key words: robot; harmonic drive device; structure; check
目 录
摘要 i
一、绪论 1
1.1课题来历与研究的目的以及意义 1
1.2 发展概况 3
1.2.1 国内的发展概况 5
1.2.2 国外的发展概况 7
1.3本课题研究的内容 9
二、机械传动设计计算 10
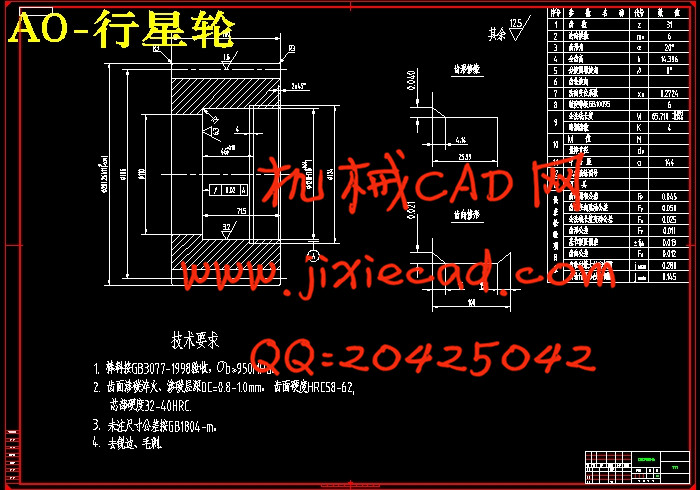
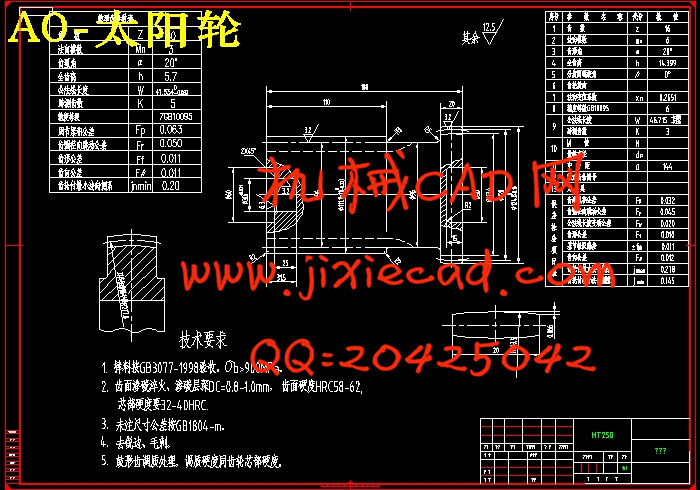
2.1行星齿轮的计算 11
2.1.1 配齿计算 12
2.1.2 几何尺寸计算 12
2.1.3 装配条件验算 14
2.2 动力源的选型计算 16
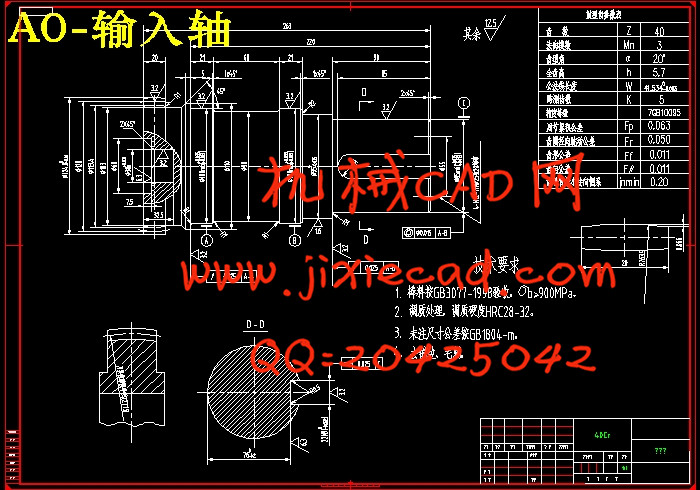
2.3 研究计算轴 18
三、主要传动零件的强度校核 20
3.1 传动轴的强度校核 24
3.2 传动齿轮的强度校核 25
3.3 轴承强度的校核 26
四、设计总结 28
结 论 29
致 谢 30
参考文献 31