设计简介
人形仿生机器人双足行走机构设计
摘 要
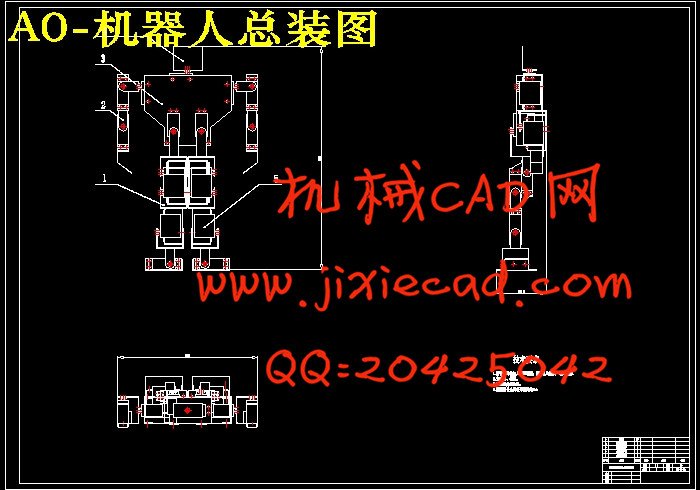
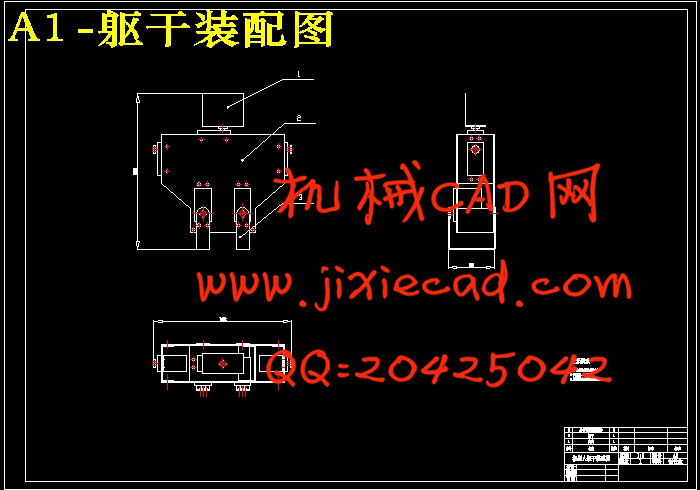
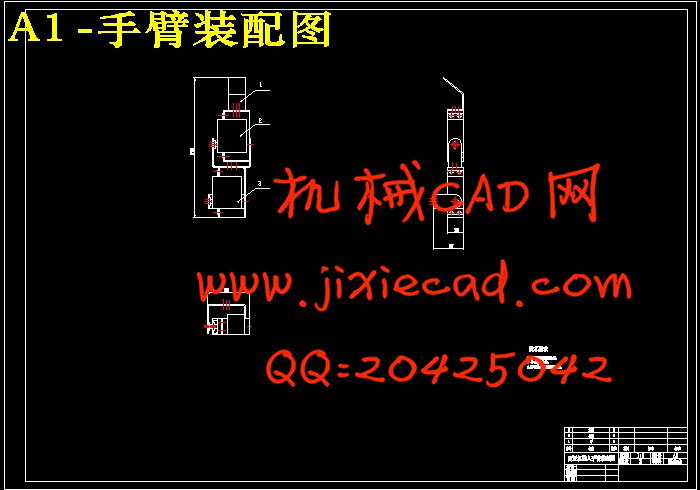
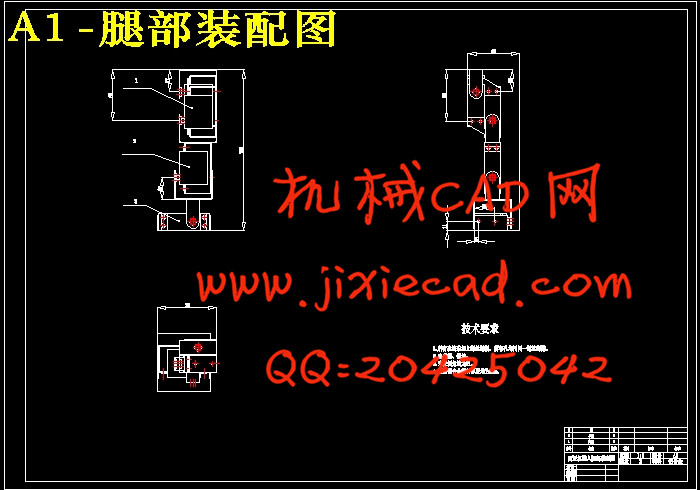
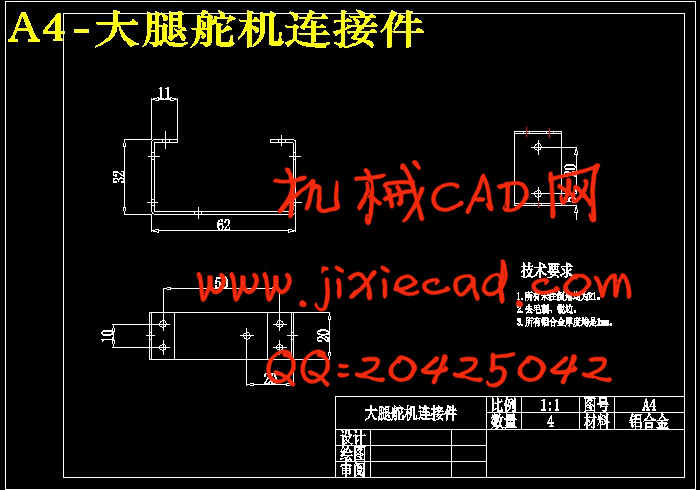
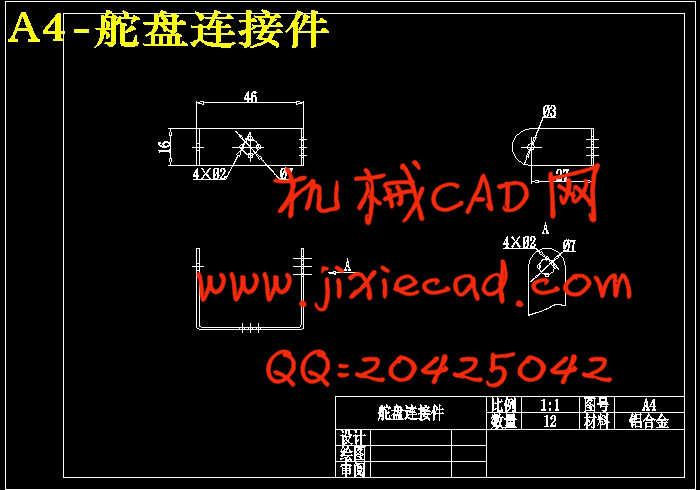
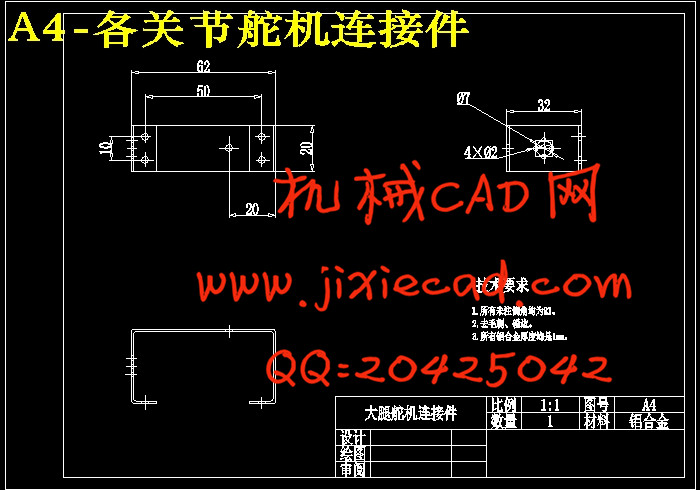
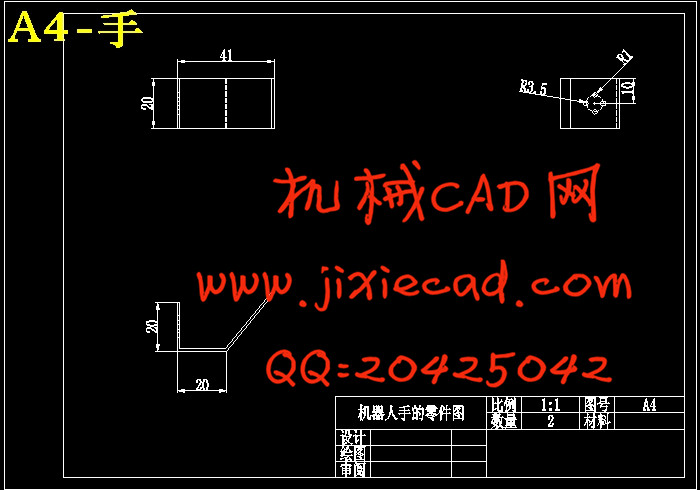
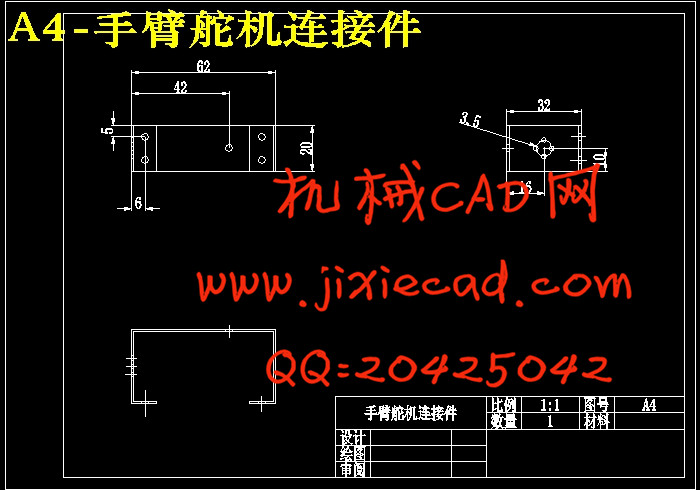
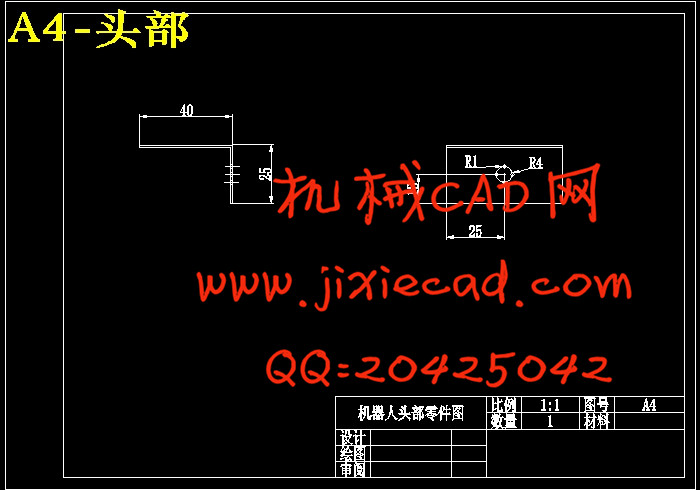
本文是在对国内外人形仿生机器人双足行走机构资料,特别是连接键部分和控制资料进行研读的基础下,对人形仿生机器人双足行走机构的整体结构、驱动、控制和传感器等方面进行方案拟定。本文对人形仿生机器人双足行走机构的结构进行详细的设计,画出总装配图、部件图并完成相应的设计计算。本文所设计的双足行走机构是采用舵机实现运动,并且采用单片机实现机器人的运动控制。本设计还对人形仿生机器人双足行走机构的结构组成和控制部分进行了详细的分析。
关键词:仿生机器人,行走机构,单片机
Abstract
This paper is in the form of domestic and foreign bionic robot biped walking mechanism for data, especially the bond part and the control data were studied under the foundation, the humanoid robot biped walking mechanism structure, drive, control and sensor of the plan. In this paper, structure of the humanoid robot biped walking mechanism were detailed design, drawing assembly diagram, parts diagram and complete the corresponding design and calculation. The design of the biped walking mechanism adopts servo motion, and using the MCU control the movement of the robot. The design structure of the humanoid robot biped walking mechanism and control part of the detailed analysis.
Keywords:bionic robot,walking mechanism,the MCU
摘 要
本文是在对国内外人形仿生机器人双足行走机构资料,特别是连接键部分和控制资料进行研读的基础下,对人形仿生机器人双足行走机构的整体结构、驱动、控制和传感器等方面进行方案拟定。本文对人形仿生机器人双足行走机构的结构进行详细的设计,画出总装配图、部件图并完成相应的设计计算。本文所设计的双足行走机构是采用舵机实现运动,并且采用单片机实现机器人的运动控制。本设计还对人形仿生机器人双足行走机构的结构组成和控制部分进行了详细的分析。
关键词:仿生机器人,行走机构,单片机
Abstract
This paper is in the form of domestic and foreign bionic robot biped walking mechanism for data, especially the bond part and the control data were studied under the foundation, the humanoid robot biped walking mechanism structure, drive, control and sensor of the plan. In this paper, structure of the humanoid robot biped walking mechanism were detailed design, drawing assembly diagram, parts diagram and complete the corresponding design and calculation. The design of the biped walking mechanism adopts servo motion, and using the MCU control the movement of the robot. The design structure of the humanoid robot biped walking mechanism and control part of the detailed analysis.
Keywords:bionic robot,walking mechanism,the MCU
目 录
1.绪论 1
1.1 双足行走机器人的特点 1
1.2 国内外双足机器人的研究现状 2
1.2.1 国内状况 2
1.2.2 国外状况 3
1.3课题技术要求 6
2.人形仿生机器人双足行走机构设计分析 6
2.1 双足行走机器人的结构分析 6
2.2 双足行走机器人设计方案 7
2.3 驱动方式的选择 9
2.4 双足机器人相关数据 10
3. 人形仿生机器人双足行走机构控制系统硬件设计 11
3.1 硬件系统的基本要求 11
3.2 硬件系统设计的技术路线和总体方案 11
3.2.1 处理器选型 11
3.2.2 直流伺服电机的控制特性 13
3.2.3 硬件设计总体方案 14
3.2.4 电源设计 16
3.2.5 舵机控制器PCB电路板的设计 16
4.人形仿生机器人双足行走机构控制系统软件设计 18
4.1 软件系统的基本要求 19
4.2 软件设计的技术路线与总体方案 19
4.3 伺服电机控制软件操作方法 21
4.3.1 串口设置 21
4.3.2 控制通道设置 22
4.3.3 操作设置 23
4.3.4 控制指令回显区 24
4.3.5 发送指令时间设置 24
4.4 微型伺服电机的选择 24
4.4.1 舵机的选型 25
4.4.2 所选舵机的控制特性 25
5.双足行走机器人步行模式的建立 26
5.1 静态步行模式设计与实现 26
5.2 姿态运动的软件实现 28
总 结 30
致 谢 31
参考文献 32