设计简介
摘
近代装配机械手是由目标机械本体、控制器系统、传感装置系统、控制系统和伺服动力器系统组成,是一种模仿人的操作、自动化控制、可多次编程、能在立体空间完成各式各样作业的Mechatronics设备。装配机械手对于提高和确保产品质量,提升生产的效率,改善工人的工作条件和快速更新产品起着非常重要的作用。装配机械手技术结合了多们学科的知识。包含机构学、计算机、控制论、信息和传感技术、人工智能、仿生学等。它是当代十分活跃,应用非常广泛的领域。机械手具有很多人类所不具有的能力,包括快速分析环境能力;抗干扰能力强,能长时间工作和工作精度高。可以说机械手是工业进步的产物,它也发挥了在当今工业的至关重要的作用。如今,机械手工业已成为世界各国备受关注的产业。
随着机械手技术的快速发展,装配机械手的应用范围正在不断扩大,提出了新要求,为提高机械手教学教育的水平,我们研制出一套以实验教学为目的的机械手演示系统。
本文阐述了机械手的发展历史,国内外的应用状况,及其巨大的优越性,提出了具体的机械手设计要求和进行了总体方案设计和各自由度的具体结构设计、计算;
关键词:机械手;工业;传动;强度
Abstract
From the industrial robot manipulator (Mechanical), controller, servo drive system and sensing device, a humanoid operation, automatic control, can repeat programming, three-dimensional space can be completed in the various operations of the electromechanical integration automatic production agency. It to stabilize, improve the product quality, improve production efficiency, plays a very important role in improving the rapid working conditions and product. Industrial robot technology is a high-tech integrated computer, control theory, mechanism, information and sensor technology, artificial intelligence, bionics multidisciplinary and form, is the contemporary research is very active, more and more widely applied in the field.The robot is on the environment of rapid response and the analysis judgment ability, and the machine can work continuously for long time, high precision, resistance to harsh environment capacity, in the sense that it is the product of the evolution of the machine, it is an important production and industrial and non-industrial sector, service equipment, automation equipment is indispensable the field of advanced manufacturing technology. Today, the robotics industry has become the world the concern of the industry.
With the rapid development of robot technology, the application field of industrial robot is constantly expanding, puts forward new requirements, in order to improve the robot teaching level, we developed a set of experimental teaching for the purpose of demonstration of the robot system.
This assay describes the development process of the robot, the application status at home and abroad, robot based on the specific design requirements, the overall design of the degree of freedom, the concrete structure design and calculation;
Key Words: robot; industrial; transmission; strength
目 录
Abstract III
目 录 IV
第一章 绪论 1
1.1 机械手概念 1
1.2 课题研究的背景和意义 1
1.3 机器人的发展及技术 2
1.3.1 机器人的发展 2
1.3.2 机器人技术 3
1.4 机器人研究概况 3
1.4.1 国外研究现状 3
1.4.2 国内研究现状 4
1.5 装配机械手的应用 5
1.6 本课题研究内容 6
第二章 总体方案设计 6
2.1 机器人工程概述 6
2.2 工业机器人总体设计方案论述 7
2.3 机器人机械传动原理 8
2.4 机器人总体方案设计 9
2.5 本章小结 10
第3章 装配机械手的机械结构设计 12
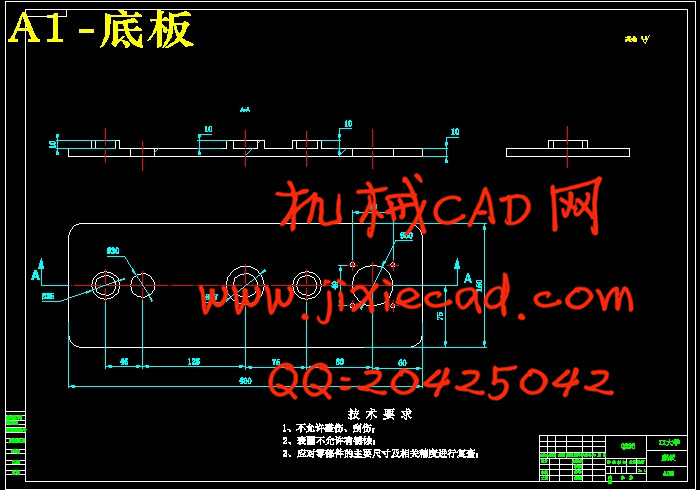
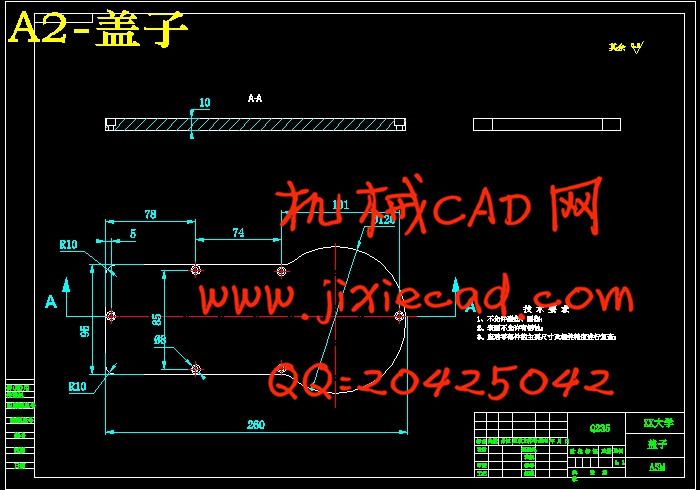
3.1 装配机械手的总体设计 12
3.1.1 装配机械手的参数 12
3.1.2 装配机械手外形尺寸与工作空间 12
3.1.3 装配机械手的总体传动方案 12
3.2 机器人腰座结构的设计 13
3.3 机器人手臂的结构设计 14
3.4机器人腕部的结构设计 15
3.5 机器人末端执行器(手爪)的设计 16
3.6 大小臂(关节2和关节3)电机的计算与型号选择 16
3.7 主要零件材料的选择与强度校核 17
3.8 臂部电机的计算与选型 20
3.9机械手重要零部件设计计算 20
3.9.1电机的设计计算 20
3.9.2同步型齿型带的设计参数 22
3.9.3滚珠丝杠副的设计参数 23
3.10 大臂和小臂机械结构设计 24
3.11腕部机械结构设计 25
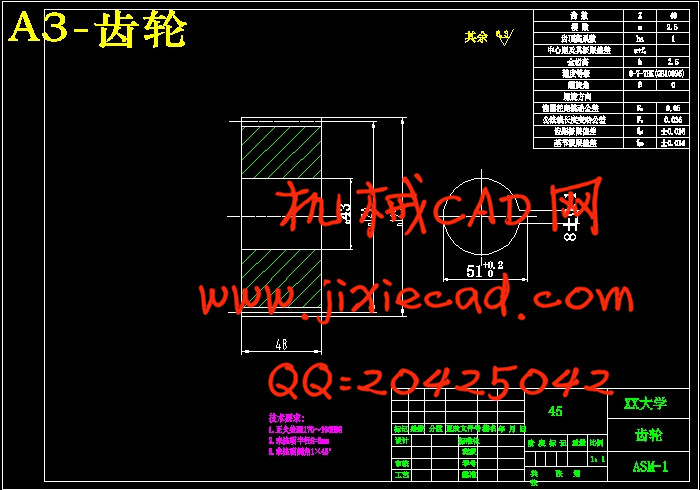
3.12 腰部机构设计(含齿轮计算校核) 25
3.13小结 29
第四章 控制系统的分析设计 30
4.1控制系统的组成结构 30
4.2 控制系统的性能要求 31
4.3 传感器的选择 31
4.3.1 位置检测装置 31
4.3.2 滑觉传感器 32
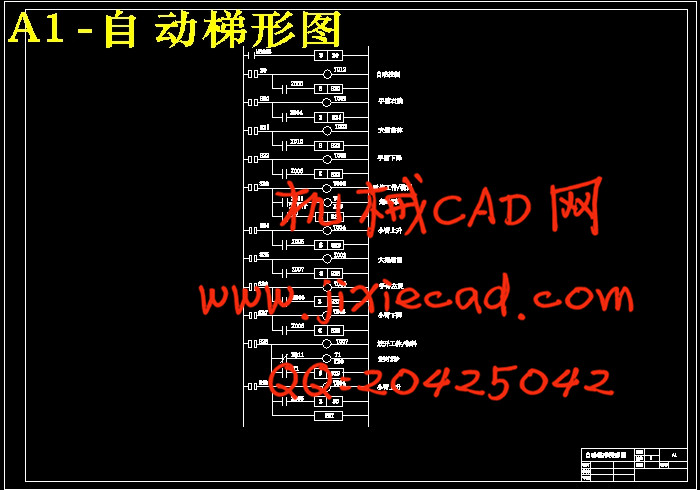
4.4 控制系统PLC的选型及控制原理 32
4.4.1 PLC控制系统设计的基本原则 32
4.4.2 PLC种类及型号选择 37
4.4.3 I/O点数分配 37
4.4.4 PLC外部接线图 38
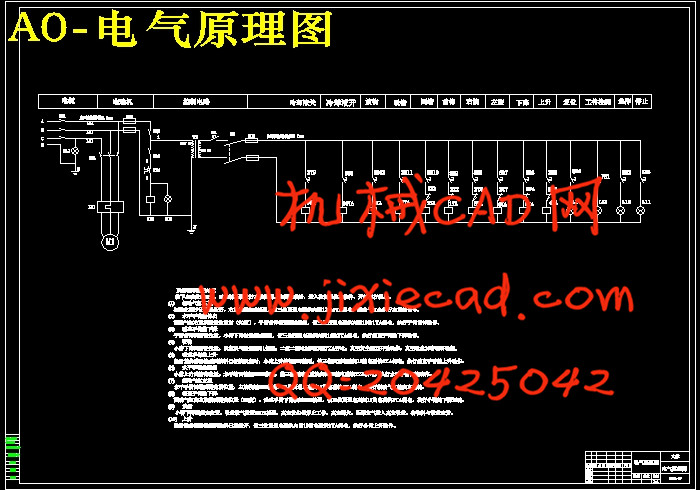
4.4.5 机械手控制原理 39
4.5 PLC程序设计 41
参考文献 45
致 谢 46