设计简介
摘 要
近代的工业机器人是由目标机械本体、控制器系统、传感装置系统、控制系统和伺服动力器系统组成,是一种模仿人的操作、自动化控制、可多次编程、能在立体空间完成各式各样作业的Mechatronics设备。工业机器人对于提高和确保产品质量,提升生产的效率,改善工人的工作条件和快速更新产品起着非常重要的作用。工业机器人技术结合了多们学科的知识。包含机构学、计算机、控制论、信息和传感技术、人工智能、仿生学等。它是当代十分活跃,应用非常广泛的领域。机器人具有很多人类所不具有的能力,包括快速分析环境能力;抗干扰能力强,能长时间工作和工作精度高。可以说机器人是工业进步的产物,它也发挥了在当今工业的至关重要的作用。如今,机器人工业已成为世界各国备受关注的产业。
随着机器人技术的快速发展,工业机器人的应用范围正在不断扩大,提出了新要求,为提高机器人教学教育的水平,我们研制出一套以实验教学为目的的机器人演示系统。
本文阐述了机器人的发展历史,国内外的应用状况,及其巨大的优越性,提出了具体的机器人设计要求和进行了总体方案设计和各自由度的具体结构设计、计算;
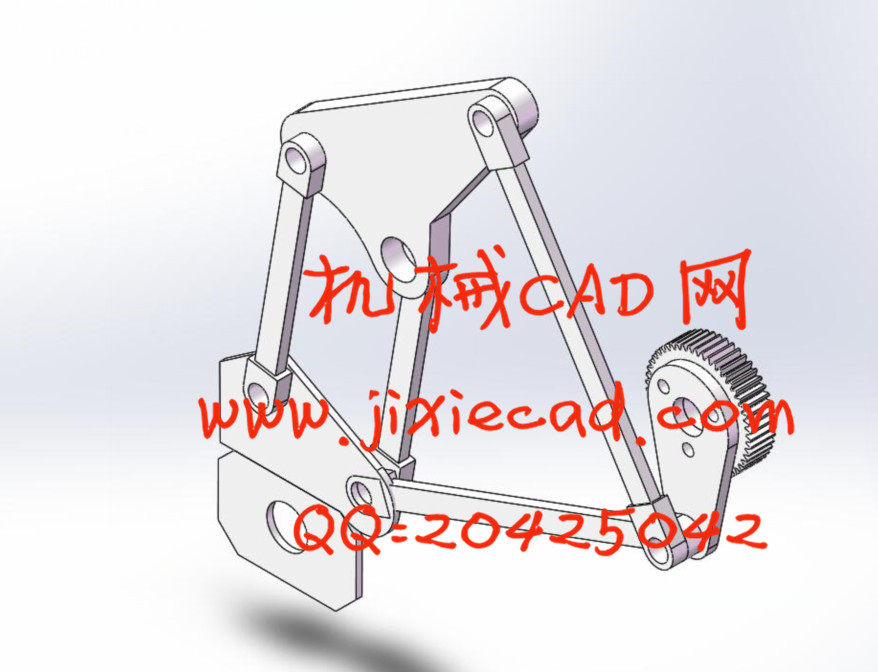
在分析国内外智能移动机器人研究现状的基础上,本文设计了一种新型移动机器人结构——将轮式驱动系统和步行式运动机构相结合,在两个电机的驱动下,通过一些简单的传动机构,使机器人可以实现单方向的步态行走。同时配合车轮运动,使机器人不仅具有一般轮式机器人移动速度快、控制简单的特点,还具有较好的越障能力。本文对这种新型移动机器人进行了越障功能的分析,并对步行机构做了运动学分析。为了设计各部件的结构,确定各车轮所需的驱动力矩,在简化车轮与地面接触关系的基础上,建立了机器人的准静态模型,进行了准静态分析,从而获得机器人在步态运动时各部件的受力状况。
关键词:移动机器人,步态行走,机器人;工业;传动;强度
Abstract
Industrial robot is composed of goal of modern mechanical body, control system, sensor system, control system and servo actuator system, is a kind of to imitate human operation, automatic control, but many programming, to every kind of operation Mechatronics device in three-dimensional space. Industrial robot to enhance and ensure the quality of products, improve production efficiency, plays a very important role in improving the working conditions of workers and the rapid updating of product. Industrial robot technology combines multiple subject knowledge. Contains the mechanism, computer, control theory, information and sensor technology, artificial intelligence, bionics. It is very active, very broad application of the field.
The robot has a lot of people do not have, including rapid analysis of environmental capacity; strong anti-interference ability, can work for a long time and high precision work. The robot can be said is a product of industrial progress, it also plays a vital role in today's industry. Today, the robotics industry has become the world the concern of the industry.
With the rapid development of robot technology, is constantly expanding the scope of application of industrial robots, puts forward new requirements, in order to improve the robot teaching education level, we developed a set of experimental teaching for the purpose of demonstration of the robot system.
This paper expounds the developing history of robots, the application status at home and abroad, and its great superiority, proposed the design requirements of concrete and the concrete structure calculation design, overall design and various degrees of freedom;
Based on the analysis of domestic and international research status of the intelligent mobile robot, this paper designed a new type of mobile robot structure -- the wheel drive system and the movement mechanism of combining in walking, driving the two motors, through some simple transmission mechanism, so that the robot can realize single direction gait. At the same time with the movement of the wheels, the robot not only has the characteristics of mobile speed fast, simple control of wheeled robot obstacle crossing ability, also has the good. This paper analyzes the obstacle function of this new mobile robot, and the walking mechanism kinematic analysis. In order to each component design structure, determine the driving torque of each wheel is required, based on simplifying the wheel and the ground contact relationship, establish the quasi static model of the robot, quasi static analysis is carried out, so as to obtain the stress state of the robot components in the gait motion at.
Keywords: mobile robot, gait, the robot industry; transmission; strength
The robot has a lot of people do not have, including rapid analysis of environmental capacity; strong anti-interference ability, can work for a long time and high precision work. The robot can be said is a product of industrial progress, it also plays a vital role in today's industry. Today, the robotics industry has become the world the concern of the industry.
With the rapid development of robot technology, is constantly expanding the scope of application of industrial robots, puts forward new requirements, in order to improve the robot teaching education level, we developed a set of experimental teaching for the purpose of demonstration of the robot system.
This paper expounds the developing history of robots, the application status at home and abroad, and its great superiority, proposed the design requirements of concrete and the concrete structure calculation design, overall design and various degrees of freedom;
Based on the analysis of domestic and international research status of the intelligent mobile robot, this paper designed a new type of mobile robot structure -- the wheel drive system and the movement mechanism of combining in walking, driving the two motors, through some simple transmission mechanism, so that the robot can realize single direction gait. At the same time with the movement of the wheels, the robot not only has the characteristics of mobile speed fast, simple control of wheeled robot obstacle crossing ability, also has the good. This paper analyzes the obstacle function of this new mobile robot, and the walking mechanism kinematic analysis. In order to each component design structure, determine the driving torque of each wheel is required, based on simplifying the wheel and the ground contact relationship, establish the quasi static model of the robot, quasi static analysis is carried out, so as to obtain the stress state of the robot components in the gait motion at.
Keywords: mobile robot, gait, the robot industry; transmission; strength
目 录
摘 要 IAbstract II
目 录 IV
第1章 绪论 1
1.1 机器人概念 1
1.2 课题研究的背景和意义 1
1.3 国内机器人的研究 2
1.4国外研究现状 4
1.5机器人的发展及技术 5
1.5.1 机器人的发展 5
1.5.2 机器人技术 5
1.6 本文主要研究内容 6
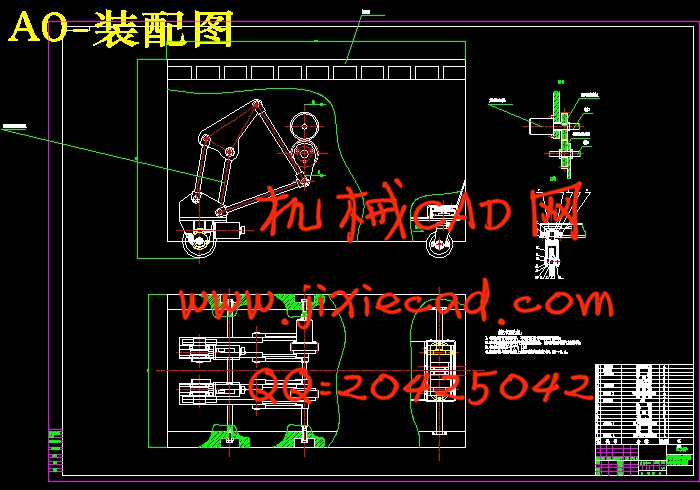
第2章 小型智能移动机器人车体结构方案设计 7
2.1机器人工程概述 7
2.2 工业机器人车体机构方案论述 8
2.3 小型智能移动机器人车体结构机械传动原理 8
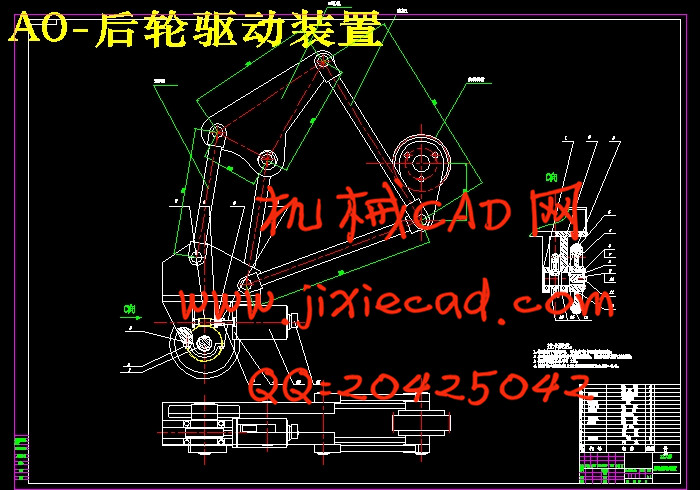
第3章 后轮驱动装置传动装置设计 11
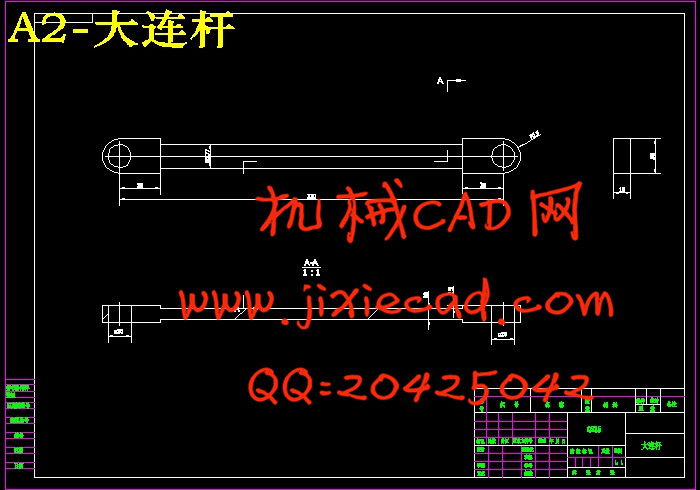
3.1 后轮驱动机构上部的四连杆机构设计 11
3.2 后轮驱动机构四连杆机构设计 18
3.2.1确定设计变量 18
3.2.2建立目标函数 18
3.2.3确定约束条件 19
3.2.4写出优化数学模型 21
3.3 步行机构受力分析 21
3.4 轴的设计计算 24
3.4.1按扭转强度计算 24
3.4.2按弯扭合成强度计算 25
3.4.3轴的刚度计算概念 26
3.4.4轴的设计步骤 26
3.5各轴的计算 26
3.5.1高速轴计算 26
3.5.2中间轴设计 29
3.5.3低速轴设计 32
3.6轴的设计与校核 35
3.6.1高速轴设计 35
3.6.2中间轴设计 35
3.6.3 低速轴设计 36
3.6.4高速轴的校核 36
3.7 轴承的设计及校核 37
3.7.1轴承种类的选择 37
3.7.2深沟球轴承结构 37
3.7.3轴承计算 39
第4章 整体车体结构设计 41
4.1 小车行走结构设计 41
4.1.1车体结构方案的比较与选择 41
4.1.2小车驱动电机功率的确定 42
4.2 蜗杆副的设计计算 45
4.2.1 蜗杆的选型 45
4.2.2 蜗杆副的材料 45
4.2.3 按齿面接触疲劳强度进行设计 45
4.2.4 蜗杆和蜗轮的主要计算参数和几何尺寸 48
4.2.5 校核蜗轮齿根弯曲疲劳强度 49
4.3 车轮部位电机选择 50
4.4 本章小结 50
总结与展望 52
参 考 文 献 53
致 谢 54