设计简介
抓料机小臂设计
摘要
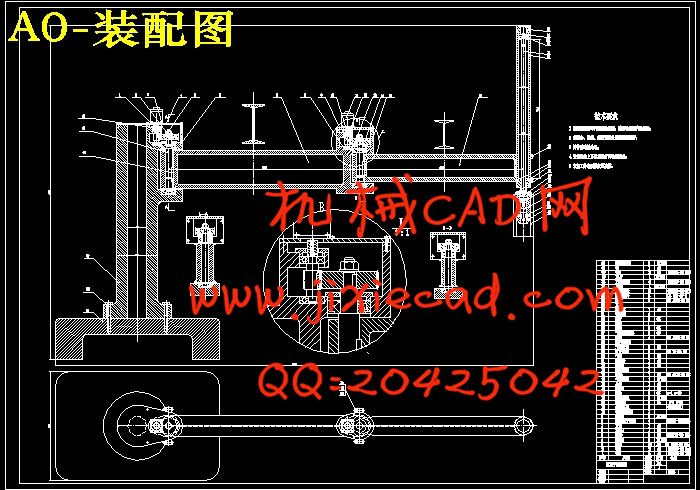
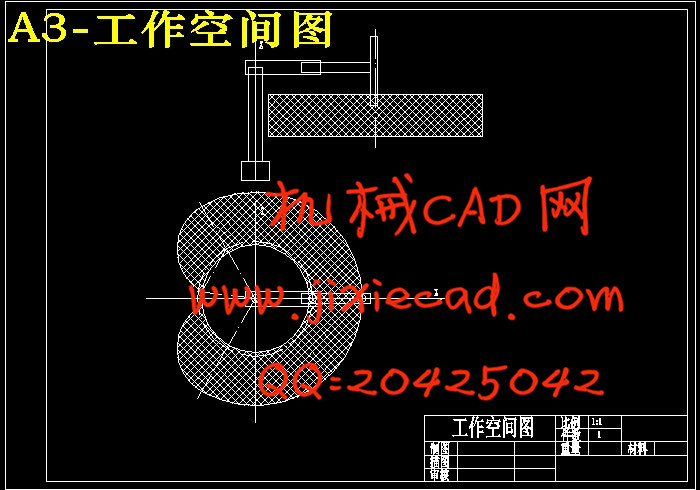
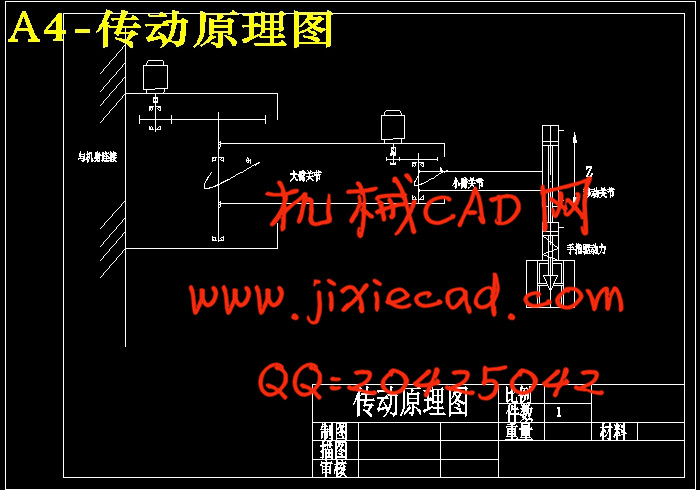
抓料机小臂采用两个回转关节和一个移动关节;两个回转关节控制前后左右运动,而移动关节则实现上下运动,其工作空间如工作空间图,它的纵截面为矩形的回转体,纵截面高为移动关节的行程长,两回转关节转角的大小决定回转体截面的大小、形状。
关键词: 抓料机 轴承 汽缸
Abstract
Selective Compliance Assembly Robot Arm have two slew joints and one move joints , two slew joints control the moving of the front and back left and right . the move joints control the moving of up and down . the work room as work room drawing . the vertical section is a rectangle slew . the high of the vertical section is move joints’ journey ,the move angle of the two slew joints decide the big and small and figure of the vertical section .
Key words: manipulator axletree cylinder
摘要
抓料机小臂采用两个回转关节和一个移动关节;两个回转关节控制前后左右运动,而移动关节则实现上下运动,其工作空间如工作空间图,它的纵截面为矩形的回转体,纵截面高为移动关节的行程长,两回转关节转角的大小决定回转体截面的大小、形状。
关键词: 抓料机 轴承 汽缸
Abstract
Selective Compliance Assembly Robot Arm have two slew joints and one move joints , two slew joints control the moving of the front and back left and right . the move joints control the moving of up and down . the work room as work room drawing . the vertical section is a rectangle slew . the high of the vertical section is move joints’ journey ,the move angle of the two slew joints decide the big and small and figure of the vertical section .
Key words: manipulator axletree cylinder