设计简介
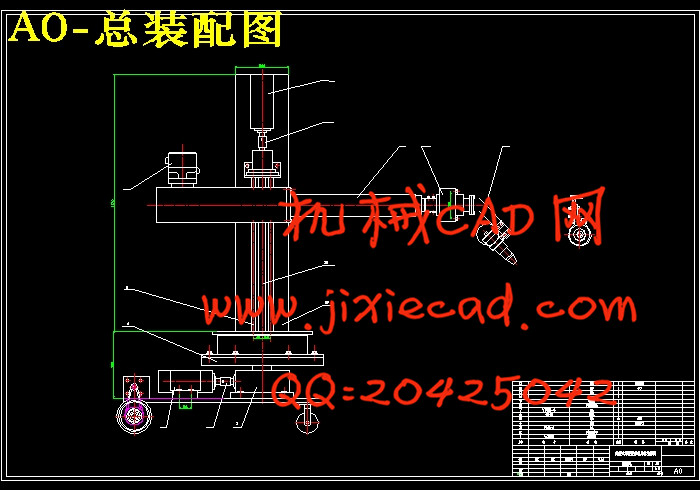
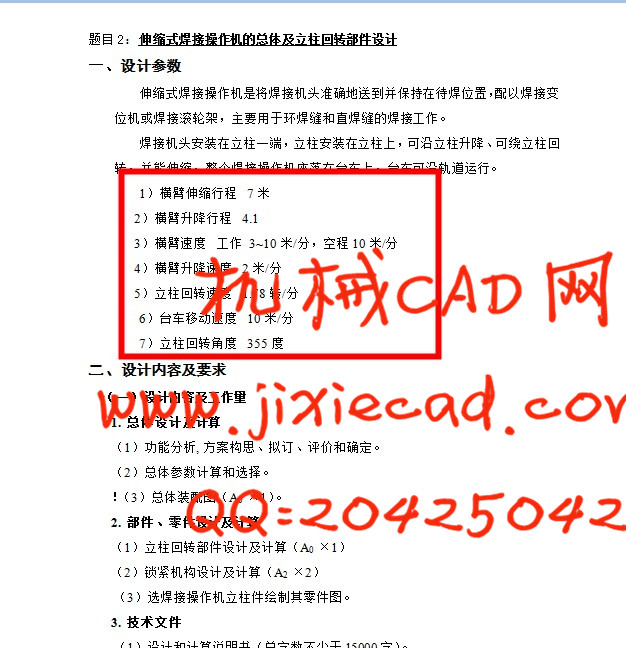
伸缩式焊接操作机是将焊接机头准确地送到并保持在待焊位置,配以焊接变位机或焊接滚轮架,主要用于环焊缝和直焊缝的焊接工作。
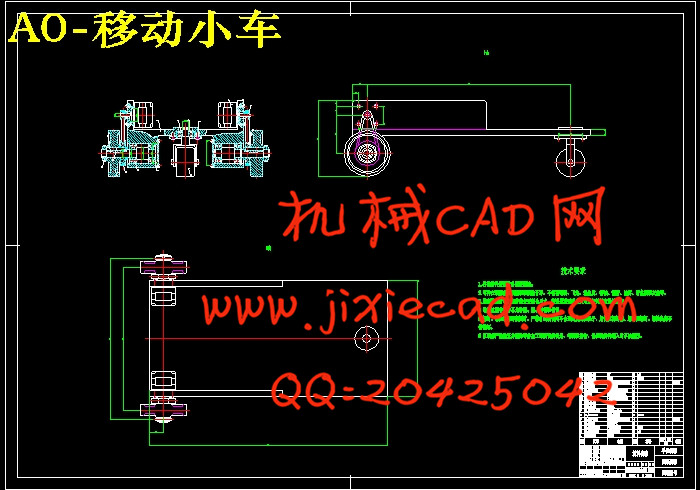
焊接机头安装在立柱一端,立柱安装在立柱上,可沿立柱升降、可绕立柱回转,并能伸缩,整个焊接操作机座落在台车上,台车可沿轨道运行。
1)横臂伸缩行程 7米
2)横臂升降行程 4.1
3)横臂速度 工作 3~10米/分,空程10米/分
4)横臂升降速度 2米/分
5)立柱回转速度 1.78转/分
6)台车移动速度 10米/分
7)立柱回转角度 355度
关键词:焊接技术,机构设计,强度校核
Key Words: Welding technology, structure design, strength check
Abstract VI
目 录 VII
第1章 绪论 1
1.1 选题的依据及意义 1
1.1.1 选题的依据 1
1.1.2 选题的意义 1
1.2 研究现状及发展趋势 1
1.2.1 移动焊接机的研究现状及发展趋势 2
1.2.2 焊接机机构设计的研究现状及发展趋势 3
1.3 本课题的设计参数 3
1.4 本课题的设计内容及要求 4
第2章 焊接操作机总体设计方案 4
2.1 基本设计思路 4
2.1.1 系统分析 4
2.1.2 总体设计框图 5
2.1.3 焊接操作机的基本参数 5
2.2 焊接操作机结构设计 6
2.3 焊接操作机材料的选择 6
2.4 机械臂的运动方式 7
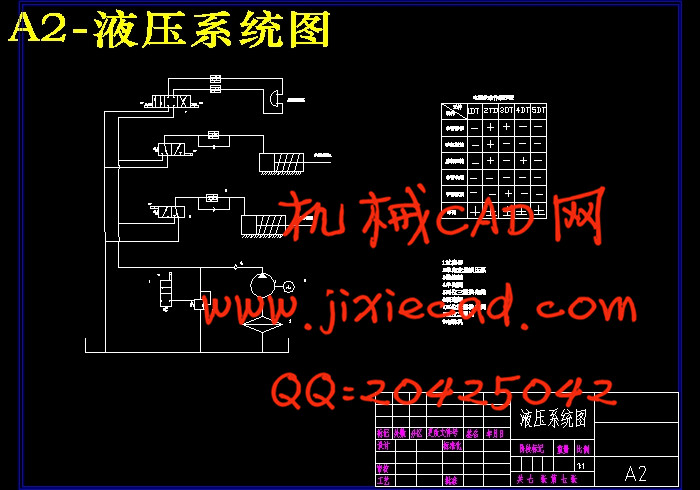
2.5 焊接操作机驱动与控制系统分析 7
2.5.1 驱动方式的选择 7
2.5.2 控制系统的选择 8
第3章 焊接机器人执行部件的设计 9
3.1 机器人末端执行器的设计要求 9
3.1.1 送丝机的选择 9
3.1.2 送丝软管的选择和保持送丝稳定的措施 10
3.1.3 焊枪的选择 11
3.1.4 防撞传感器 11
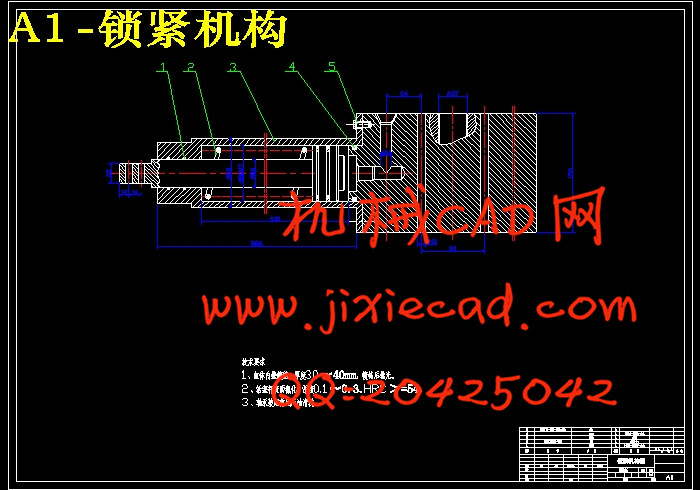
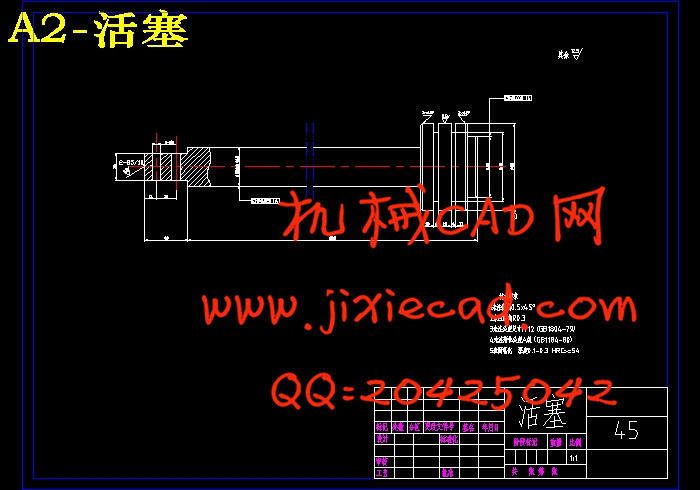
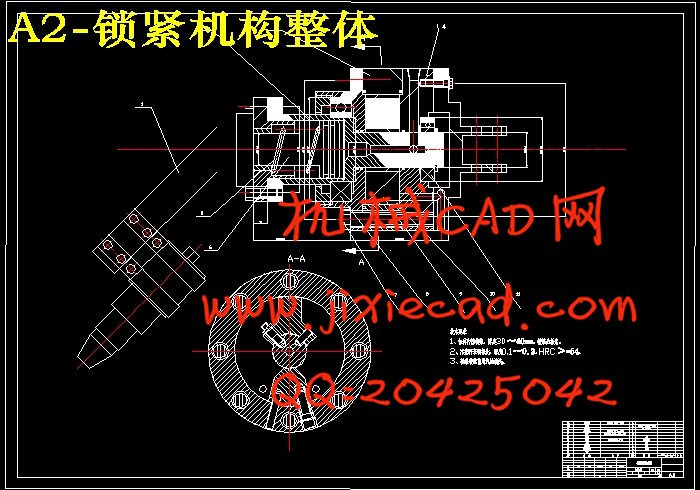
2.2锁紧机构设计计算 11
2.3锁紧部件伸缩机构设计 13
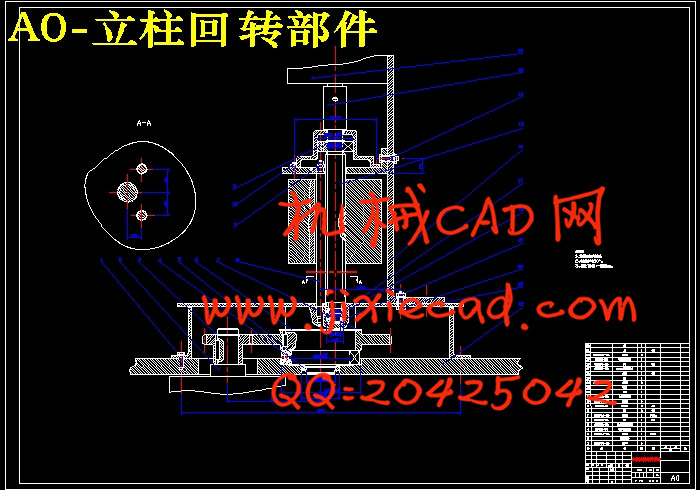
第四章 立柱机座的结构设计 15
4.1电机的选择 16
4.2减速器的选择 17
4.3螺柱的设计与校核 17
第五章 焊接操作机的定位与平稳性 19
5.1常用的定位方式 19
5.2影响平稳性和定位精度的因素 19
5.3焊接操作机运动的缓冲装置 20
总结 22
致 谢 23
参考文献 24
焊接机头安装在立柱一端,立柱安装在立柱上,可沿立柱升降、可绕立柱回转,并能伸缩,整个焊接操作机座落在台车上,台车可沿轨道运行。
1)横臂伸缩行程 7米
2)横臂升降行程 4.1
3)横臂速度 工作 3~10米/分,空程10米/分
4)横臂升降速度 2米/分
5)立柱回转速度 1.78转/分
6)台车移动速度 10米/分
7)立柱回转角度 355度
摘 要
随着工业水平的发展,重要的大型焊接结构件的应用越来越多,其中大量的焊接工作必须在现场作业,如大型舰船舱体、甲板的焊接、大型球罐(储罐)的焊接等。而这些焊接场合下,焊接机要适应焊缝的变化,才能做到提高焊接自动化的水平。无疑,将焊接机技术和焊缝跟踪技术结合将有效地解决大型结构件野外作业的自动化焊接难题。因此焊接机的设计对于解决这一难题至关重要。关键词:焊接技术,机构设计,强度校核
Abstract
With the development of industrial level, important large welding structure is more and more applied, in which a large number of welding work must work on the site, such as a large ship cabin, the deck of large spherical tank welding, such as welding ( tank). These welding occasion, welding seam confidential to change, to improve the level of welding automation. Undoubtedly, the welding technology and welding seam tracking technology will effectively solve the large-scale structure of field operation automation welding problem. Therefore the welding machine is designed to solve this problem is crucial.Key Words: Welding technology, structure design, strength check
目 录
摘 要 VAbstract VI
目 录 VII
第1章 绪论 1
1.1 选题的依据及意义 1
1.1.1 选题的依据 1
1.1.2 选题的意义 1
1.2 研究现状及发展趋势 1
1.2.1 移动焊接机的研究现状及发展趋势 2
1.2.2 焊接机机构设计的研究现状及发展趋势 3
1.3 本课题的设计参数 3
1.4 本课题的设计内容及要求 4
第2章 焊接操作机总体设计方案 4
2.1 基本设计思路 4
2.1.1 系统分析 4
2.1.2 总体设计框图 5
2.1.3 焊接操作机的基本参数 5
2.2 焊接操作机结构设计 6
2.3 焊接操作机材料的选择 6
2.4 机械臂的运动方式 7
2.5 焊接操作机驱动与控制系统分析 7
2.5.1 驱动方式的选择 7
2.5.2 控制系统的选择 8
第3章 焊接机器人执行部件的设计 9
3.1 机器人末端执行器的设计要求 9
3.1.1 送丝机的选择 9
3.1.2 送丝软管的选择和保持送丝稳定的措施 10
3.1.3 焊枪的选择 11
3.1.4 防撞传感器 11
2.2锁紧机构设计计算 11
2.3锁紧部件伸缩机构设计 13
第四章 立柱机座的结构设计 15
4.1电机的选择 16
4.2减速器的选择 17
4.3螺柱的设计与校核 17
第五章 焊接操作机的定位与平稳性 19
5.1常用的定位方式 19
5.2影响平稳性和定位精度的因素 19
5.3焊接操作机运动的缓冲装置 20
总结 22
致 谢 23
参考文献 24