设计简介
目 录
摘 要 IAbstract II
目 录 III
第1章 绪论 1
1.1 课题研究意义 1
1.2 除冰机器人研究现状 1
1.3除冰设备发展趋势 3
1.4 课题要求 4
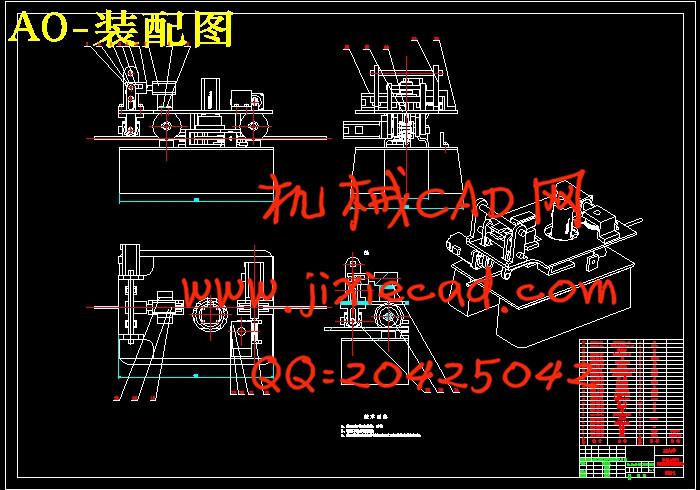
第2章 超高压巡线除冰机器人总体方案设计 6
2.1 工作原理 6
2.2驱动方式选择 6
2.3 传动方式选择 7
2.4 行走方式选择 7
2.5 除冰方式选择 7
第3章 绕线压紧传动机构设计 9
3.1电机的选择 9
3.2 蜗杆传动设计计算 9
3.2.1 选择蜗杆、蜗轮材料 9
3.2.2 确定蜗杆头数Z
3.2.3 确定蜗杆蜗轮中心距a 10
3.2.4 蜗杆传动几何参数设计 11
3.2.5 环面蜗轮蜗杆校核计算 14
3.3 轴的设计 15
3.3.1 轴的材料选择 15
3.3.2 轴的结构设计 16
3.3.3 轴承校核
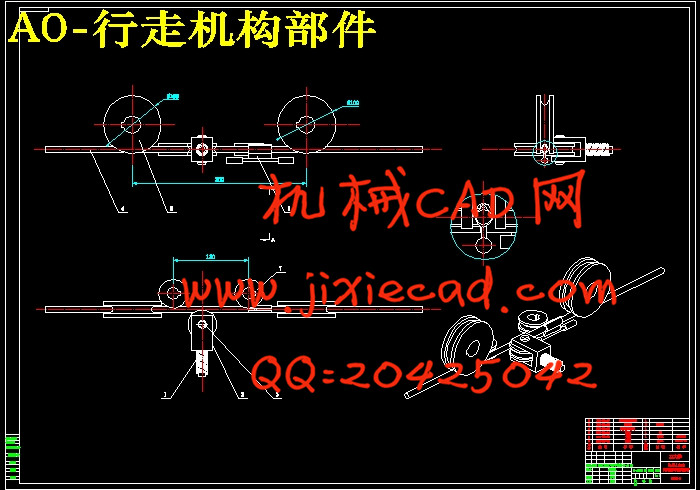
第4章 机器人行走跨越障碍机构设计 20
第5章 其它机构设计 24
4.1铣刀机构 24
4.2机架机构 25
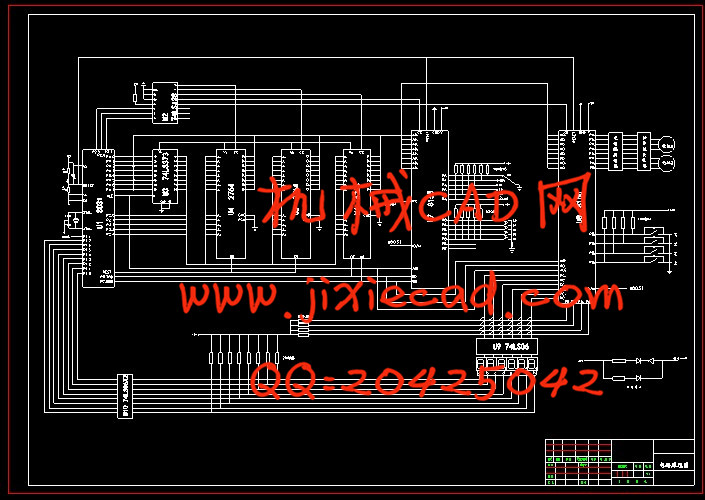
第6章 数控硬件电路设计 26
6.1硬件电路设计 27
6.1.1 数控系统的硬件结构 27
6.1.2 数控系统硬件电路的功能 27
6.2关于各线路元件之间线路连接 28
6.3关于电路原理图的一些说明 29
总结与展望 32
参考文献 33