设计简介
摘 要
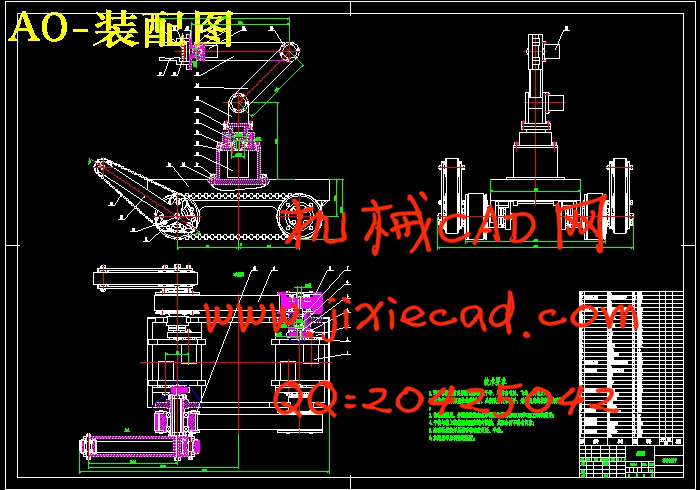
移动机械手是用于处置或销毁爆可疑、危险物品的专用器材,避免不必要的人员伤亡。它可用于多种复杂地形进行移动。此设计的移动机械手可实现回转、上下移动,夹持并且能过坑、越障等动作。
此设计移动方案的选择是采用了履带式驱动结构,而手臂部分则采用关节式机构。结构整体使用模块化设计,以便后续拆卸维修,可以适应于各种复杂的路面,并可主动控制两侧摇臂的转动来调节机器人的运动姿态,从而达到辅助过坑、越障等动作。经过合理的设计后机器人将具有很好的环境适应能力、机动能力并能承受一定的掉落冲击,此设计的移动机构主要由四部分组成:电机的选择、主履带设计、副履带设计、臂部及手腕设计。
本文首先根据课题所给的技术参数和功能要求提出移动机械手车体结构方案,并对方案进行分析。接着,对主要技术参数进行了计算选择;然后,对各主要零部件进行了设计与校核;最后,通过AutoCAD制图软件绘制了移动机械手车体结构装配图及主要零部件图。
关键词:移动机械手;手臂;手腕;同步带
Abstract
Mobile robot is used for the disposal or destruction of explosive suspicious, special equipment, dangerous goods, to avoid unnecessary casualties. It can be used to move a variety of complex terrain. The design of the mobile robot can achieve rotation, moving up and down, gripping and lead a pit, obstacle and other activities.
Select this design is the use of mobile solutions crawler drive structure, and the arm part articulated mechanism is used. Modular design of the overall structure for subsequent maintenance of the demolition, can be adapted to a variety of complicated road, and take the initiative to control the rotation on both sides to adjust the robot arm athletic stance, so as to assist the over pit, obstacle and other activities. After a reasonable design robots will have a good environmental adaptability, mobility and can withstand the impact of falling, this design is moving mechanism is mainly composed of four parts: selection of the motor, the main track design, deputy track design, arm section and wrist design.
This paper proposes moving mechanical structure handcart scheme according to subjects given technical parameters and functional requirements, and program analysis. Next, the main technical parameters were calculated selection; then, all the major parts and components for the design and verification; and finally, through the AutoCAD drawing software to draw a handcart moving mechanical structure and main parts assembly drawing FIG.
Keywords: Bobile robot; Arm; Wrist; Belt
目 录
摘 要 II
Abstract III
第一章 绪论 1
1.1研究背景及意义 1
1.2国内外研究及发展现状 2
第二章 总体方案设计 4
2.1设计参数及功能要求 4
2.1.1设计技术参数 4
2.1.2功能要求 4
2.2方案选定 4
2.2.1车体方案设计 4
2.2.2手臂方案设计 5
2.3原理分析分析 5
2.3.1主要机构工作原理 5
2.3.2运动特性分析 6
2.3.3手臂原理分析 7
第三章 机器人运动分析及主电机的选择 8
3.1运动分析 8
3.1.1跨越台阶 8
3.1.2 跨越沟槽 9
3.3.3 斜坡运动分析 9
3.2主电机的选择 10
第四章 零部件的设计与选择 14
4.1履带(同步带)部分设计 14
4.1.1同步带的选择 14
4.1.2确定主从动轮直径 16
4.1.3确定节线长度 17
4.1.4确定最大功率时带宽 18
4.1.5功率验算 20
4.1.6同步带的物理机械性能 20
4.1.7同步带主从动轮设计 21
4.2副履带(同步带)部分设计 23
4.2.1计算同步带的带宽 24
4.2.2计算H带的基准额定功率 25
4.2.3中心距的选择 25
4.2.4计算同步带节线长度 25
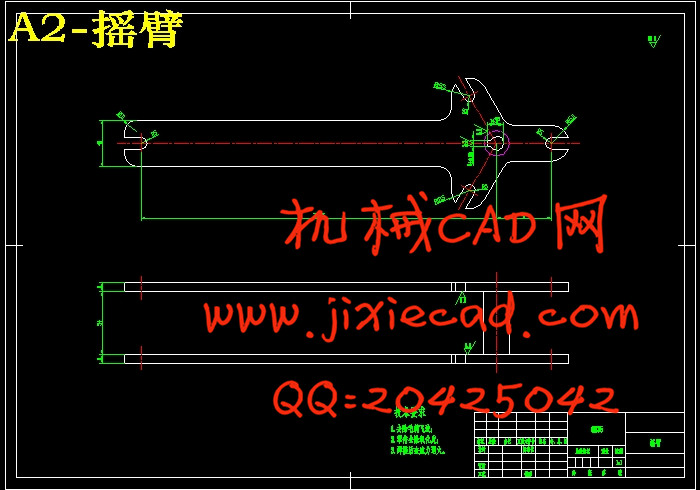
4.2.5车体副履带摇臂设计 26
4.3机械手臂部分设计 26
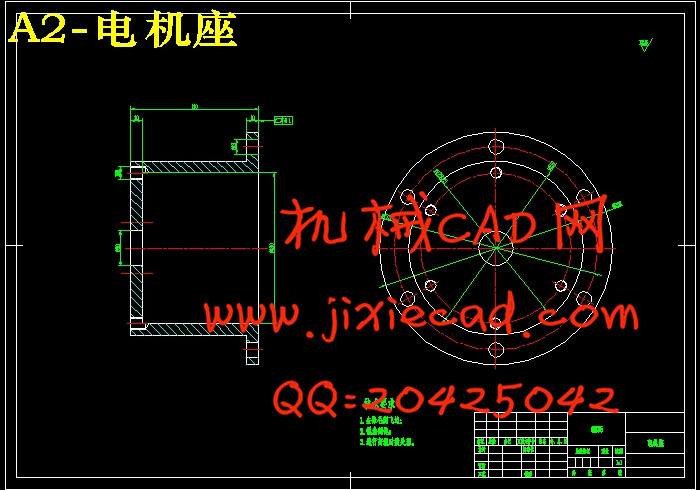
4.3.1电机的选择 26
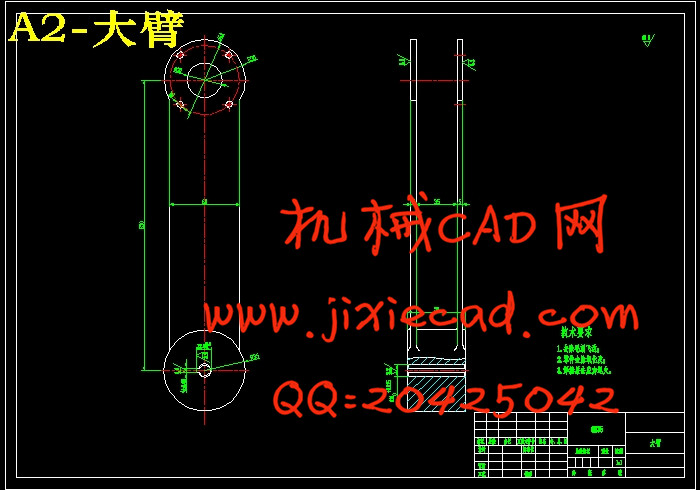
4.3.2大、小臂设计 28
4.3.3手爪、手腕设计 29
第五章 基于Pro/E的三维设计 32
5.1 Pro/E三维设计软件概述 32
5.2三维设计 32
5.2.1车体 32
5.2.2主履带 33
5.2.3副履带 33
5.2.4手臂、手腕 33
5.2.5三维装配 34
总 结 35
参考文献 36
致 谢 37
移动机械手是用于处置或销毁爆可疑、危险物品的专用器材,避免不必要的人员伤亡。它可用于多种复杂地形进行移动。此设计的移动机械手可实现回转、上下移动,夹持并且能过坑、越障等动作。
此设计移动方案的选择是采用了履带式驱动结构,而手臂部分则采用关节式机构。结构整体使用模块化设计,以便后续拆卸维修,可以适应于各种复杂的路面,并可主动控制两侧摇臂的转动来调节机器人的运动姿态,从而达到辅助过坑、越障等动作。经过合理的设计后机器人将具有很好的环境适应能力、机动能力并能承受一定的掉落冲击,此设计的移动机构主要由四部分组成:电机的选择、主履带设计、副履带设计、臂部及手腕设计。
本文首先根据课题所给的技术参数和功能要求提出移动机械手车体结构方案,并对方案进行分析。接着,对主要技术参数进行了计算选择;然后,对各主要零部件进行了设计与校核;最后,通过AutoCAD制图软件绘制了移动机械手车体结构装配图及主要零部件图。
关键词:移动机械手;手臂;手腕;同步带
Abstract
Mobile robot is used for the disposal or destruction of explosive suspicious, special equipment, dangerous goods, to avoid unnecessary casualties. It can be used to move a variety of complex terrain. The design of the mobile robot can achieve rotation, moving up and down, gripping and lead a pit, obstacle and other activities.
Select this design is the use of mobile solutions crawler drive structure, and the arm part articulated mechanism is used. Modular design of the overall structure for subsequent maintenance of the demolition, can be adapted to a variety of complicated road, and take the initiative to control the rotation on both sides to adjust the robot arm athletic stance, so as to assist the over pit, obstacle and other activities. After a reasonable design robots will have a good environmental adaptability, mobility and can withstand the impact of falling, this design is moving mechanism is mainly composed of four parts: selection of the motor, the main track design, deputy track design, arm section and wrist design.
This paper proposes moving mechanical structure handcart scheme according to subjects given technical parameters and functional requirements, and program analysis. Next, the main technical parameters were calculated selection; then, all the major parts and components for the design and verification; and finally, through the AutoCAD drawing software to draw a handcart moving mechanical structure and main parts assembly drawing FIG.
Keywords: Bobile robot; Arm; Wrist; Belt
目 录
摘 要 II
Abstract III
第一章 绪论 1
1.1研究背景及意义 1
1.2国内外研究及发展现状 2
第二章 总体方案设计 4
2.1设计参数及功能要求 4
2.1.1设计技术参数 4
2.1.2功能要求 4
2.2方案选定 4
2.2.1车体方案设计 4
2.2.2手臂方案设计 5
2.3原理分析分析 5
2.3.1主要机构工作原理 5
2.3.2运动特性分析 6
2.3.3手臂原理分析 7
第三章 机器人运动分析及主电机的选择 8
3.1运动分析 8
3.1.1跨越台阶 8
3.1.2 跨越沟槽 9
3.3.3 斜坡运动分析 9
3.2主电机的选择 10
第四章 零部件的设计与选择 14
4.1履带(同步带)部分设计 14
4.1.1同步带的选择 14
4.1.2确定主从动轮直径 16
4.1.3确定节线长度 17
4.1.4确定最大功率时带宽 18
4.1.5功率验算 20
4.1.6同步带的物理机械性能 20
4.1.7同步带主从动轮设计 21
4.2副履带(同步带)部分设计 23
4.2.1计算同步带的带宽 24
4.2.2计算H带的基准额定功率 25
4.2.3中心距的选择 25
4.2.4计算同步带节线长度 25
4.2.5车体副履带摇臂设计 26
4.3机械手臂部分设计 26
4.3.1电机的选择 26
4.3.2大、小臂设计 28
4.3.3手爪、手腕设计 29
第五章 基于Pro/E的三维设计 32
5.1 Pro/E三维设计软件概述 32
5.2三维设计 32
5.2.1车体 32
5.2.2主履带 33
5.2.3副履带 33
5.2.4手臂、手腕 33
5.2.5三维装配 34
总 结 35
参考文献 36
致 谢 37