设计简介
摘 要
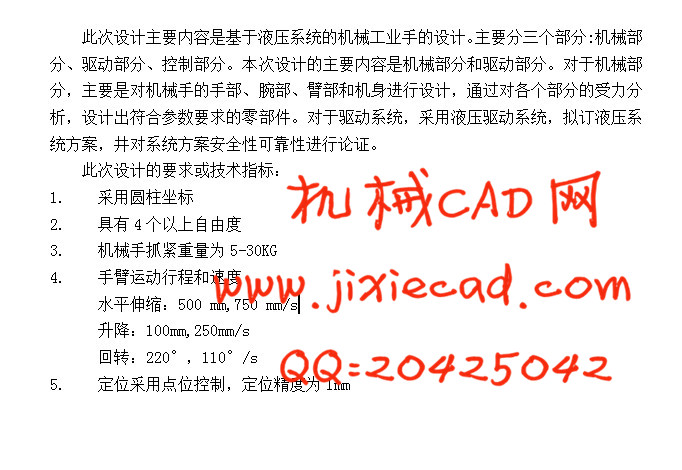
在现代的制造业中,企业为提高生产效率,保障产品质量,普遍重视生产过程的自动化程度,同时中国各大城市的劳动力出现紧张的现象,工业机器人作为自动化生产线上的重要成员,逐渐被企业所认同并采用,其发展趋势十分迅猛。它的技术水平和应用程度反映了一个国家现代工业化的水平。目前,工业机器人主要承担着焊接、喷涂、搬运以及堆垛等重复性并且劳动强度极大的工作,在某些复杂的装配生产中也逐步被采纳。
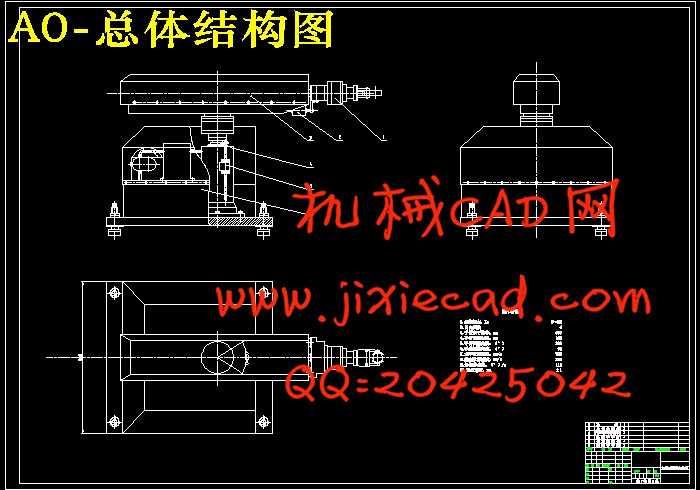
通过对机械设计制造及其自动化专业大学所学知识,对机械手各部分机械结构和功能的了解和分析,设计了此液压传动机械手。本课题重点针对机械手的手部、腕部、臀部等各部分机械结构以及液压系统进行了详细的设计与计算。大致可分为机械手的总体设计、机身结构的设计、机械手手臂结构的设计、机械手腕部的结构设计、手部的结构设计、机械手驱动系统的设计以及液压系统的设计。本设计的机械手可在空间抓放物体,动作灵活多样,可代替人工机械手,在高温和危险的作业区进行作业,可抓取材料特殊的工件,并保证工件不变形损坏。
关键词:手部,腕部,臂部,液压系统
ABSTRACT
在现代的制造业中,企业为提高生产效率,保障产品质量,普遍重视生产过程的自动化程度,同时中国各大城市的劳动力出现紧张的现象,工业机器人作为自动化生产线上的重要成员,逐渐被企业所认同并采用,其发展趋势十分迅猛。它的技术水平和应用程度反映了一个国家现代工业化的水平。目前,工业机器人主要承担着焊接、喷涂、搬运以及堆垛等重复性并且劳动强度极大的工作,在某些复杂的装配生产中也逐步被采纳。
通过对机械设计制造及其自动化专业大学所学知识,对机械手各部分机械结构和功能的了解和分析,设计了此液压传动机械手。本课题重点针对机械手的手部、腕部、臀部等各部分机械结构以及液压系统进行了详细的设计与计算。大致可分为机械手的总体设计、机身结构的设计、机械手手臂结构的设计、机械手腕部的结构设计、手部的结构设计、机械手驱动系统的设计以及液压系统的设计。本设计的机械手可在空间抓放物体,动作灵活多样,可代替人工机械手,在高温和危险的作业区进行作业,可抓取材料特殊的工件,并保证工件不变形损坏。
关键词:手部,腕部,臂部,液压系统
ABSTRACT
In the modern large-scale manufacturing industry, enterprises pay more attention on the automation degree of the production process in order to enhance the production efficiency, and guarantee the product quality,saving in labor. At the same time, with the phenomenon of labor force in China's cities appeared, industrial robot, as an important member of automation production line, gradually become enterprise is accepted and adopted, its development trend is very rapidly. The technique level and the application degree of industrial robots reflect the national level of the industrial automation to some extent, currently, industrial robots mainly undertake the job of welding, spraying, transporting and stowing etc. , which are usually done repeatedly and take high work strength, and most of these robots work in playback way.
Integrate the knowledge of Machine, discuss and analysis the each part and function of manipulator; design a kind of cylinder coordinate manipulator used to pack and unload work piece for CNC machine tools. In particular, made the detailed design about base, arm, and end device and the control system etc. including Total design, waist’s construction design, the arm’s construction design, the wrist’s construction design, the end device’s construction design, and the drive system of manipulator. At the same time, analysis and compute the hydraulic pressure system and control system. The design of the manipulator can be catch and put objects in space flexibility. It can also replace artificial to operate at high temperatures and dangerous areas and can grab weight larger artifacts, guaranteeing the work piece deformation damage.
Key words: Manipulator ,Hand,Wrist ,Buttock,Hydraulic system
目 录
第1章 绪论 21.1工业机械手概述 2
1.1.1机械手的应用性 3
1.1.2机械手的先进性 3
1.2设计目的 4
1.3设计的内容及要求 4
第2章 机械手方案设计 5
第3章 机械手的机械结构设计 7
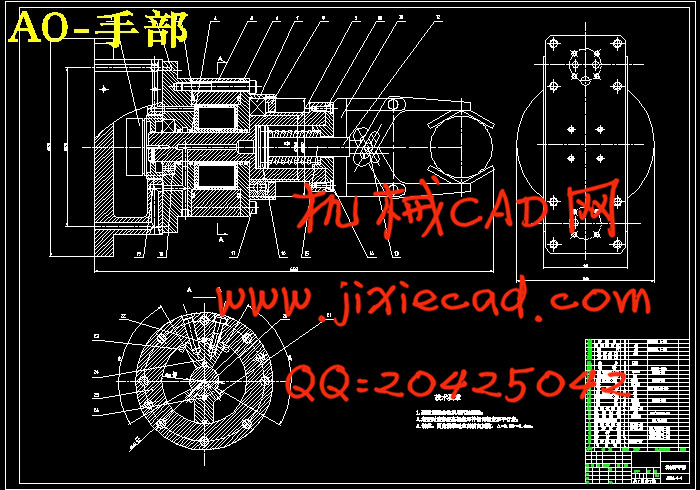
3.1 手部设计 7
3.1.1夹钳式手部设计的基本要求 8
3.1.2夹钳式手部的典型结构 8
3.1.3滑槽杠杆式手部的设计计算 8
3.2腕部设计 12
3.2.1腕部的结构形式 12
3.2.2手腕驱动力矩的计算 13
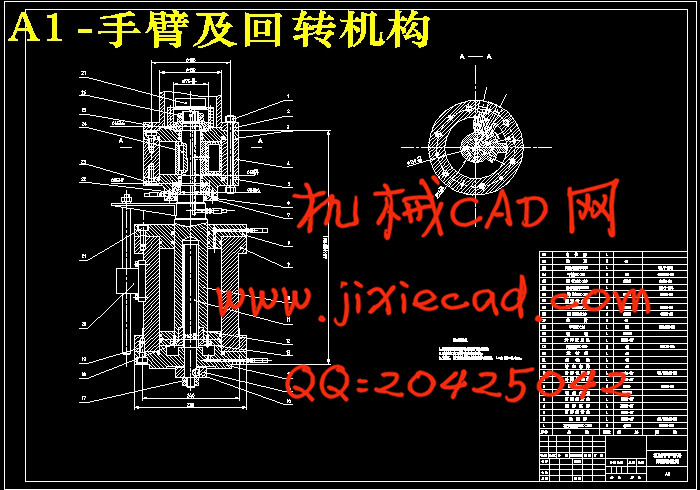
3.3臂部的结构 16
3.3.1手臂直线运动机构 16
3.3.2手臂伸缩运动 16
3.3.3 导向装置 17
3.3.4手臂的升降运动 18
3.3.5手臂回转运动 18
3.3.6手臂的设计计算 19
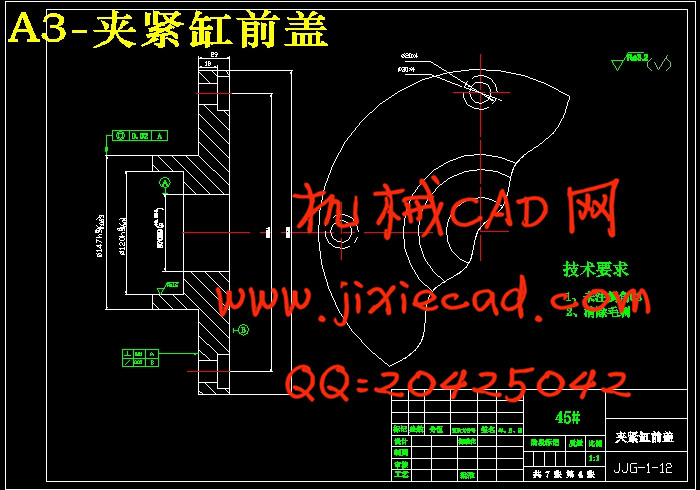
第4章 液压系统的设计 24
4.1各种驱动系统特点 24
4.2机械手驱动系统的选择原则 24
4.3机械手液压系统原理介绍 25
4.4液压系统简单计算 27
4.5液压系统的性能验算 29
4.5.1系统压力损失验算 29
4.5.2系统总效率验算 30
4.5.3系统发热升温验算 31
第5章 机械手的使用与维护 32
5.1 液压系统的一般使用与维护 33
5.2 一般技术安全事项 33
结 论 34
参考文献 35
致 谢 36