设计简介
摘 要
伺服系统是跟踪雷达的主要组成部分,伺服系统精度直接影响到雷达的跟踪精度。随着电力电子技术、传感器技术、电机控制技术的不断发展,以及高性能数字信号处理器技术的不断进步,雷达伺服驱动正在由直流向交流方向发展,伺服控制系统逐渐由模拟控制系统向数字控制系统发展,先进的控制理论也被应用于伺服系统中,这些都为高性能雷达伺服控制系统的开发奠定了基础。机械扫描雷达在跟踪目标的过程中,用俯仰电机和方位电机控制雷达天线转动,调整天线指向目标。
本设计采用单片机 AT89C51 和数字化轴角编码器完成了雷达天控系统的设计, 不仅简化了系统的硬件结构, 增加了其可靠性, 而且提高了系统的控制精度。系统由速度环、和电流环双闭环构成。速度环采用PID 控制, 较好地解决了定位精度、 超调量和动态响应速度间的矛盾。电流环可使系统恒加速起动与制动,快速跟踪系统的输入量。在电流环中用霍尔元件检测电流反馈量, 一则使电流反馈迅速, 相应提高了电流环的调节速度; 再则线性度好, 有助于起动特性的陡度。
关键词:AT89C51;伺服系统;传感器
1 绪论 1
1.1 国内外研究现状 1
1.2 研究意义 2
1.3 研究内容 2
2 雷达天线伺服控制系统的组成与原理 2
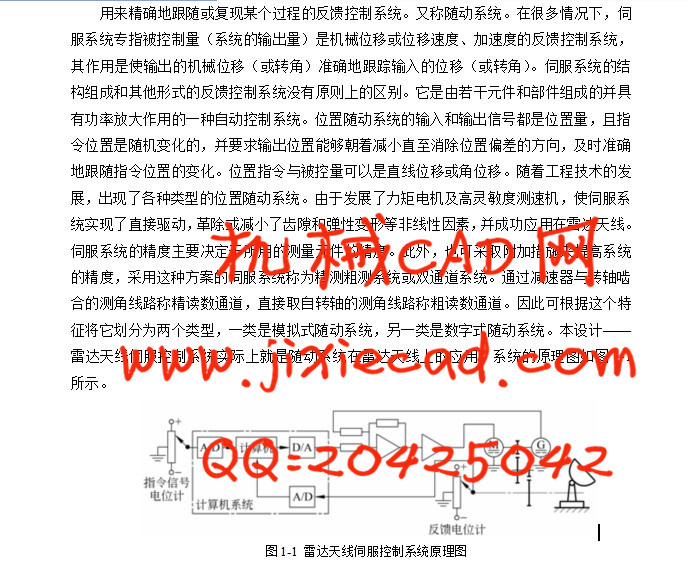
2.1 伺服系统的原理 3
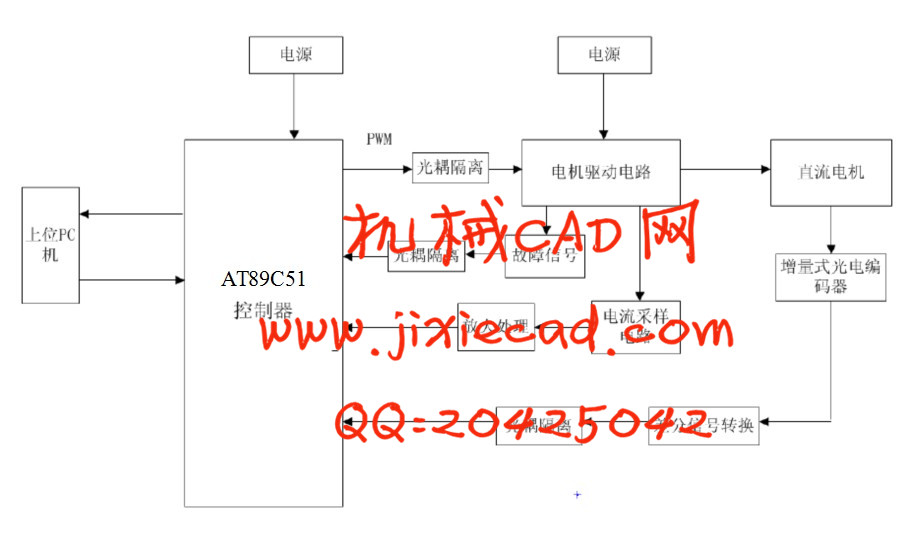
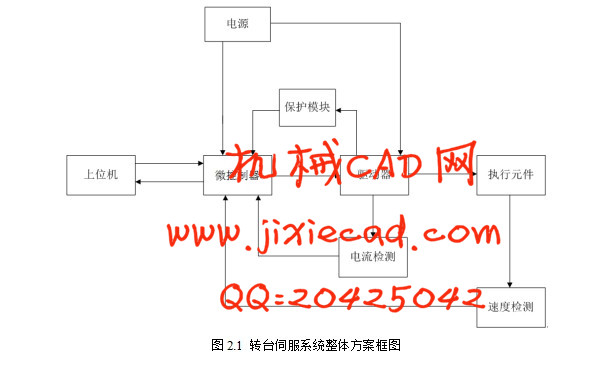
2.2 雷达天线伺服控制系统的组成 3
3 雷达天线伺服控制系统硬件电路设计 4
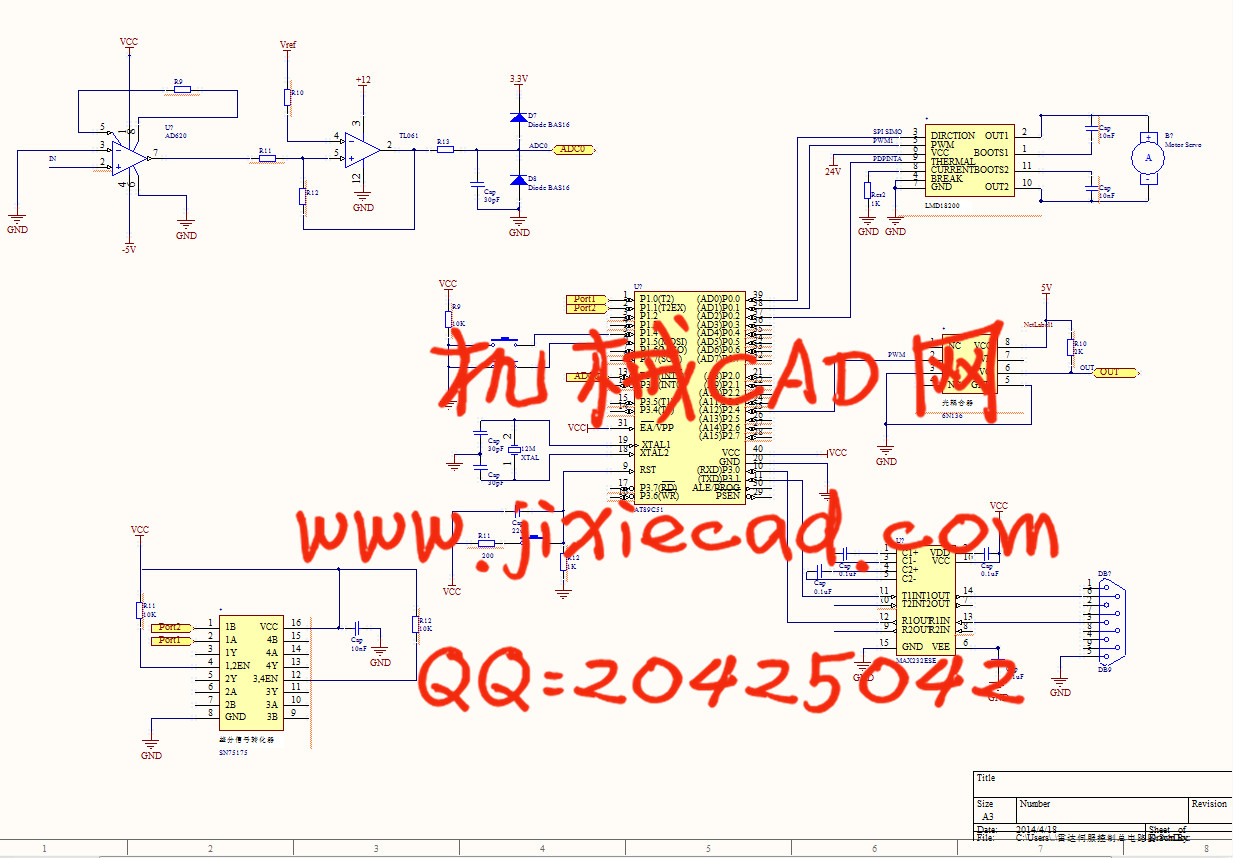
3.1 主控电路 5
3.1.1 时钟电路 6
3.1.2 串口通信电路 7
3.2 功率驱动电路 7
3.2.1 LMD18200芯片应用简介 7
3.2.2 功率驱动电路设计 8
3.3 执行机构 9
3.3.1 伺服电机的选择 9
3.4 检测电路 10
3.4.1 速度检测电路 10
3.4.2 电流检测电路 11
3.6 本章小结 13
4 雷达天线伺服控制系统的软件设计 13
4.1 主程序设计 14
4.2 SCI中断 14
4.3 ADC采样中断 15
4.4 PID调节程序 16
4.5 保护中断 16
4.6 本章小结 17
5 结 论 17
参考文献 19
伺服系统是跟踪雷达的主要组成部分,伺服系统精度直接影响到雷达的跟踪精度。随着电力电子技术、传感器技术、电机控制技术的不断发展,以及高性能数字信号处理器技术的不断进步,雷达伺服驱动正在由直流向交流方向发展,伺服控制系统逐渐由模拟控制系统向数字控制系统发展,先进的控制理论也被应用于伺服系统中,这些都为高性能雷达伺服控制系统的开发奠定了基础。机械扫描雷达在跟踪目标的过程中,用俯仰电机和方位电机控制雷达天线转动,调整天线指向目标。
本设计采用单片机 AT89C51 和数字化轴角编码器完成了雷达天控系统的设计, 不仅简化了系统的硬件结构, 增加了其可靠性, 而且提高了系统的控制精度。系统由速度环、和电流环双闭环构成。速度环采用PID 控制, 较好地解决了定位精度、 超调量和动态响应速度间的矛盾。电流环可使系统恒加速起动与制动,快速跟踪系统的输入量。在电流环中用霍尔元件检测电流反馈量, 一则使电流反馈迅速, 相应提高了电流环的调节速度; 再则线性度好, 有助于起动特性的陡度。
关键词:AT89C51;伺服系统;传感器
目 录
1 绪论 11.1 国内外研究现状 1
1.2 研究意义 2
1.3 研究内容 2
2 雷达天线伺服控制系统的组成与原理 2
2.1 伺服系统的原理 3
2.2 雷达天线伺服控制系统的组成 3
3 雷达天线伺服控制系统硬件电路设计 4
3.1 主控电路 5
3.1.1 时钟电路 6
3.1.2 串口通信电路 7
3.2 功率驱动电路 7
3.2.1 LMD18200芯片应用简介 7
3.2.2 功率驱动电路设计 8
3.3 执行机构 9
3.3.1 伺服电机的选择 9
3.4 检测电路 10
3.4.1 速度检测电路 10
3.4.2 电流检测电路 11
3.6 本章小结 13
4 雷达天线伺服控制系统的软件设计 13
4.1 主程序设计 14
4.2 SCI中断 14
4.3 ADC采样中断 15
4.4 PID调节程序 16
4.5 保护中断 16
4.6 本章小结 17
5 结 论 17
参考文献 19