设计简介
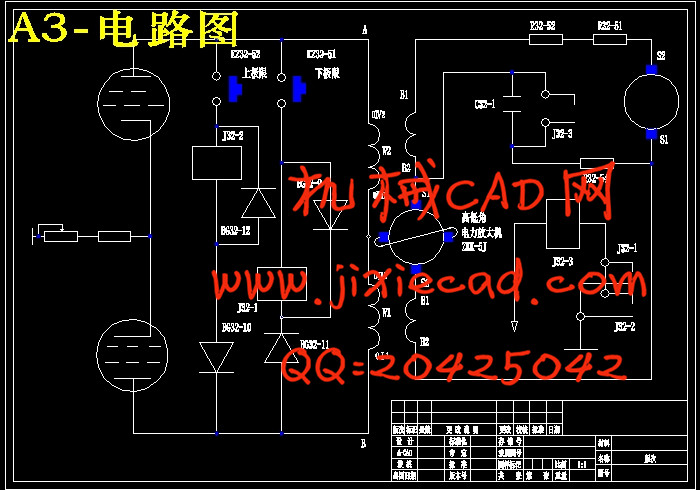
高低角俯仰限制电路的设计
摘 要
雷达俯仰控制是指雷达根据工作模式、量程、载机高度和目标距离,自动设置俯仰角度或由操作员设置俯仰角度。机载雷达天线俯仰控制通常只采用手动方式,而机载雷达的天线俯仰控制有自动、手动和高度带设置三种方式,自动控制是指雷达系统根据操作员选定的工作模式、量程,自动设置天线俯仰角;手动控制是指雷达操作员可以根据实际探测需求,人工设置天线的俯仰角;高度带设置是指根据载机高度和目标距离,系统自动设置天线俯仰角。
本课题是研究炮瞄雷达天线高低角工作范围为-15—95度,当转到接近最高和最低极限位置时,该电路自动去掉天线驱动电机上的控制电压,并使天线很快被制动,防止机械和电机过荷损坏,起到保护作用。
关键词: 雷达天线,俯仰机构,限制电路
The design of high and low angle pitch limit circuit
Abstract
Functions of the pitch and lift mechanism of radar antenna is introduced and the type and characteristics of the present mechanisms are summarized in this paper.A new type of electron mechanical servo drivemechanism is introduced which is based on the planar mechanism principle.The operation principle and operation process of this new mechanism are described.The design process is also introduced,including the program selection,the dynamic analysis and the corresponding calculations etc.The former approach includes the proper choice of reliable radar components and subsystems, and also the incorporation of the necessary redundancy in radar subsystems.
The reliability of solid-state devices is usually much higher than that of vacuum-tube devices. As a result, a tube transmitter is usually one of the least reliable radar subsystems, and use of solid-state transmitters gives considerable improvement in radar reliability, permitting the manufacture of maintenancefree radars
Keywords:radar antenna ,pitch mechanism ,limit circuit
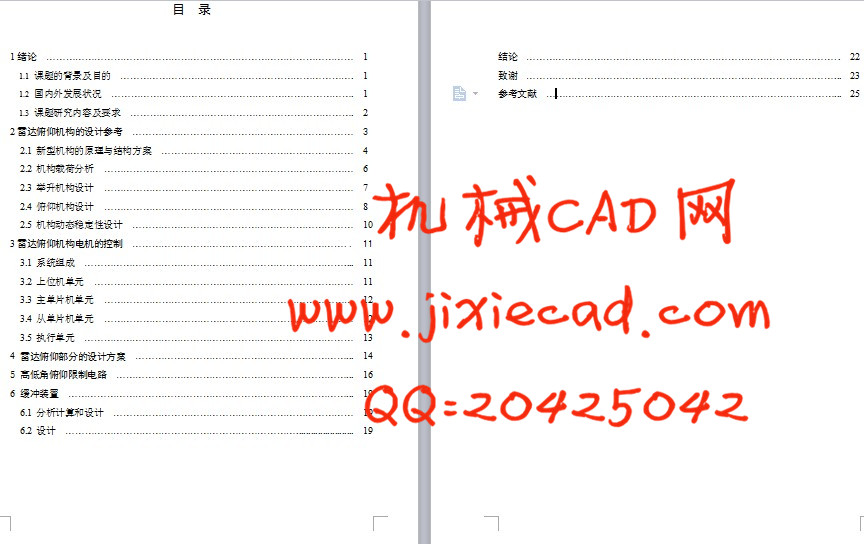
目 录
1绪论 …………………………………………………………………………………… 1
1.1 课题的背景及目的 ………………………………………………………………. 1
1.2 国内外发展状况 …………………………………………………………………. 1
1.3 课题研究内容及要求 ……………………………………………………………. 2
2雷达俯仰机构的设计参考 …………………………………………………………… 3
2.1 新型机构的原理与结构方案 …………………………………………………… 4
2.2 机构载荷分析 …………………………………………………………………… 6
2.3 举升机构设计 …………………………………………………………………… 7
2.4 俯仰机构设计 …………………………………………………………………… 8
2.5 机构动态稳定性设计 …………………………………………………………… 10
3雷达俯仰机构电机的控制 ………………………………………………………….. 11
3.1 系统组成 ……………………………………………………………………….... 11
3.2 上位机单元 ……………………………………………………………………… 11
3.3 主单片机单元 …………………………………………………………………… 12
3.4 从单片机单元 …………………………………………………………………… 12
3.5 执行单元 ………………………………………………………………………… 13
4 雷达俯仰部分的设计方案 …………………………………………………………... 14
5 高低角俯仰限制电路 ………………………………………………………………... 16
6 缓冲装置 ……………………………………………………………………………... 19
6.1 分析计算和设计 ………………………………………………………………… 19
6.2 设计 ………………………………………………………………........................ 19
结论 …………………………………………………………………………………….. 22
致谢 ……………………………………………………………………………………... 23
参考文献 ………………………………………………………………………………... 25