设计简介
摘 要
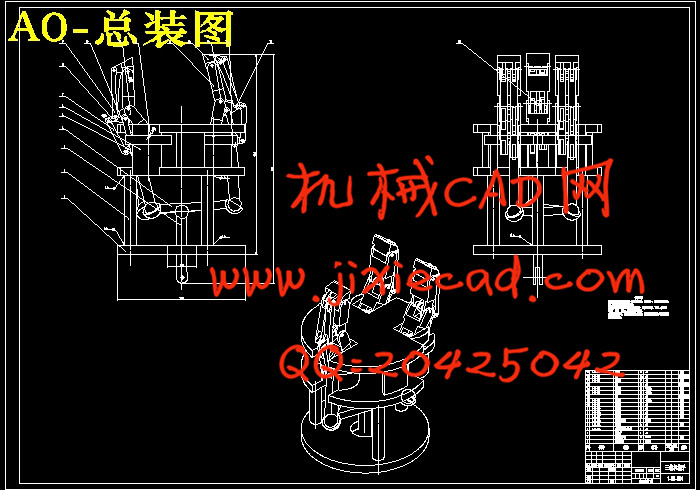
本设计是根据亚确定输入的原理设计的以少输入控制多自由度的三指九自由度机械手,当在机械手初始运动时机械手的每个手指作为一个运动单元作整体的运动,但当机械手手指的第一个指节因某种因素突然受阻,驱动力克服动力约束,自动启动了位于第一个指节和第二个指节之间关节的转动自由度,这时就应用了各个手指的第二个自由度,同样的,当第二个指节和第三个指节间的转动自由度因为某种外在的因素突然受阻时,自动启动机械手各个手指的第三个自由度。这样就实现了机械手的以少输入控制多自由度的控制方式,以达到机械手对不同形状工件的抓取动作,可以达到省力、省能以及减少电动机设计容量,因而减少机构的负载及改善动力性能。
【关键词】亚确定输入、自由度、指节
Abstract
The design is based on the principle of deficient-determinate input to low input control means more than nine degrees of freedom of the three DOF manipulator, when the initial movement of the robot manipulator as a motor unit for each finger movement as a whole, but when the robot The first finger knuckles suddenly blocked by a certain factor, driving force to overcome the power constraints, automatically launched in the first knuckle and the second knuckle joint between the rotational DOF, then the application of the first of each finger two DOF, the same, when the second and third knuckle knuckle between the rotational DOF for some external factors suddenly blocked, the robot automatically start the third DOF of each finger. This realization of the robot with less DOF input control and more control to achieve the mechanical hand to capture action different shapes of the work piece can be achieved effort, saving energy and reducing the design capacity of electric motors, thus reducing the load and improve power sector performance .
【Key words】deficient-determinate input;DOF;knuckle
目 录
摘 要 1
1 绪论 2
1.1仿生机械的概述 2
1.2课题的研究目的和意义 3
1.3国内外该领域的研究现状 3
1.4关节运动的驱动方式 7
1.4.1绳索滑轮驱传动方式 8
1.4.2 链条、钢带驱动 9
1.4.3 闭式链连杆传动机构的驱动方式 9
1.5本文主要研究内容 10
2 原理方案的设计 11
2.1 明确设计任务 12
2.2 功能分析 12
2.3 功能分析 12
2.4 功能分解 12
2.5 原理方案 13
2.6. 具体工作原理 14
2.6 本章总结 15
3 机械手手指的运动分析 16
3.1 手指机构运动学 16
3.1.1 手指机构的自由度计算 16
3.1.2 位置正解 17
3.1.3 三自由度仿生机械手指的位置反解分析 18
3.2 仿生机械手指的速度分析 22
3.3 仿生机械手指的运动空间分析与仿真 23
4 基于Pro/e的仿生机械手的建模,装配及仿真 25
4.1 Pro/e简介 25
4.2仿生机械手各部分的建模 26
4.3机械手的装配与仿真 26
4.3.1机械手的装配 26
4.3.2机械手的仿真 32
总结与体会 36
致谢词 37
参考文献 38
本设计是根据亚确定输入的原理设计的以少输入控制多自由度的三指九自由度机械手,当在机械手初始运动时机械手的每个手指作为一个运动单元作整体的运动,但当机械手手指的第一个指节因某种因素突然受阻,驱动力克服动力约束,自动启动了位于第一个指节和第二个指节之间关节的转动自由度,这时就应用了各个手指的第二个自由度,同样的,当第二个指节和第三个指节间的转动自由度因为某种外在的因素突然受阻时,自动启动机械手各个手指的第三个自由度。这样就实现了机械手的以少输入控制多自由度的控制方式,以达到机械手对不同形状工件的抓取动作,可以达到省力、省能以及减少电动机设计容量,因而减少机构的负载及改善动力性能。
【关键词】亚确定输入、自由度、指节
Abstract
The design is based on the principle of deficient-determinate input to low input control means more than nine degrees of freedom of the three DOF manipulator, when the initial movement of the robot manipulator as a motor unit for each finger movement as a whole, but when the robot The first finger knuckles suddenly blocked by a certain factor, driving force to overcome the power constraints, automatically launched in the first knuckle and the second knuckle joint between the rotational DOF, then the application of the first of each finger two DOF, the same, when the second and third knuckle knuckle between the rotational DOF for some external factors suddenly blocked, the robot automatically start the third DOF of each finger. This realization of the robot with less DOF input control and more control to achieve the mechanical hand to capture action different shapes of the work piece can be achieved effort, saving energy and reducing the design capacity of electric motors, thus reducing the load and improve power sector performance .
【Key words】deficient-determinate input;DOF;knuckle
目 录
摘 要 1
1 绪论 2
1.1仿生机械的概述 2
1.2课题的研究目的和意义 3
1.3国内外该领域的研究现状 3
1.4关节运动的驱动方式 7
1.4.1绳索滑轮驱传动方式 8
1.4.2 链条、钢带驱动 9
1.4.3 闭式链连杆传动机构的驱动方式 9
1.5本文主要研究内容 10
2 原理方案的设计 11
2.1 明确设计任务 12
2.2 功能分析 12
2.3 功能分析 12
2.4 功能分解 12
2.5 原理方案 13
2.6. 具体工作原理 14
2.6 本章总结 15
3 机械手手指的运动分析 16
3.1 手指机构运动学 16
3.1.1 手指机构的自由度计算 16
3.1.2 位置正解 17
3.1.3 三自由度仿生机械手指的位置反解分析 18
3.2 仿生机械手指的速度分析 22
3.3 仿生机械手指的运动空间分析与仿真 23
4 基于Pro/e的仿生机械手的建模,装配及仿真 25
4.1 Pro/e简介 25
4.2仿生机械手各部分的建模 26
4.3机械手的装配与仿真 26
4.3.1机械手的装配 26
4.3.2机械手的仿真 32
总结与体会 36
致谢词 37
参考文献 38