设计简介
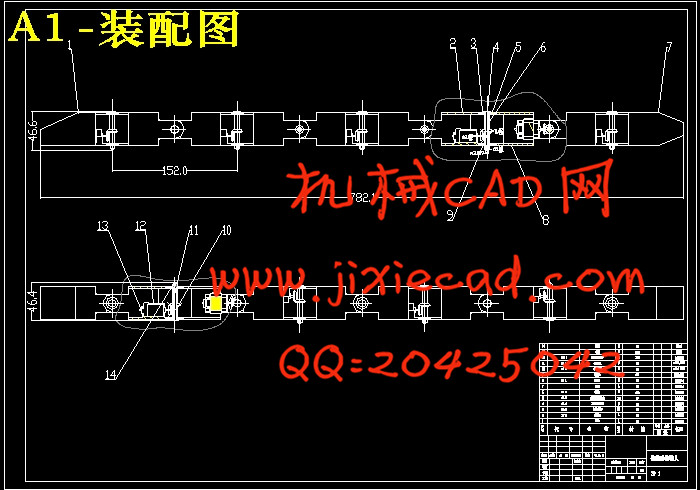
本文提出了一种蛇形机器人,并对蛇形机器人进行了直线运动步态的规划,该部分重点阐述了蛇形机器人直线运动步态运动时的三角波推进机理,利用平面丝杆机构的知识分析了三角波推进时的运动,并且对蛇形机器人进行了结构设计,PRO/ENGINEER仿真,结合具体装配所存在的问题,提出了一种解决偏心问题的具体解决方案。最后对蛇形机器人的控制系统进行了研究,提出了PC机—无线传输—UART串口—上位机—下位机—驱动电机的分散控制,集中管理的控制模式。
关键词:蛇形机器人,结构设计,步态规划,控制系统
Abstract
This paper presents a snake-like robot, and carries out the planning of its straight line gait. The section focuses on the triangular wave advance mechanism of the snake-like robot when it does some straight line gait movement, analyzes the movement of triangular wave advance mechanism using flat screw bodies’ knowledge and designs the structure and PRO/ENGINEER simulation of the snake-like robot. Combined with the problems of the specific assembly, a solution of the eccentricity is proposed in detail. Finally, the snake-like robot’s control system is studied, and put forward a PC -wireless transmission-UART serial –computer—lower computer- decentralized control of drive motor, centralized control mode.
Keywords snake-like robot , Physical design , Step state plans , Control system
目 次
1 引言……………………………………………………………………………………… 1
1.1 仿蛇形机器人的原理及研究热点………………………………………………….3
1.2 仿蛇形机器人的研究意义………………………………………………………….4
1.3 蛇形机器人的优缺点和用途……………………………………………………….4
1.3.1 蛇形机器人的优点…………………………………………………………. 5
1.3.2 蛇形机器人的缺点………………………………………………………… 6
1.3.3 蛇形机器人的应用…………………………………………………………..6
1.4 课题研究内容……………………………………………………………………….7
2 蛇形机器人的机构设计………….…………………………………………………9
2.1 蠕动原理 …………… …………………………………………………………… 9
2.2 蠕动步态规划 ………………… …….………………………………………… 9
2.2.1 三动杆蠕动步态描述…………………………………………………… .10
2.2.2 由三连杆组成的蠕动步态波形传递模型……………………………… …11
2.2.3 波形传递阶段相邻连杆间相对角位移φi及其角速度分析……………….12
2.2.4 小结………………………………………………………………………… 14
2.3 机构简图……………………………………………………………………………14
3 蛇形机器人步行机构的结构设计…………………………………………………16
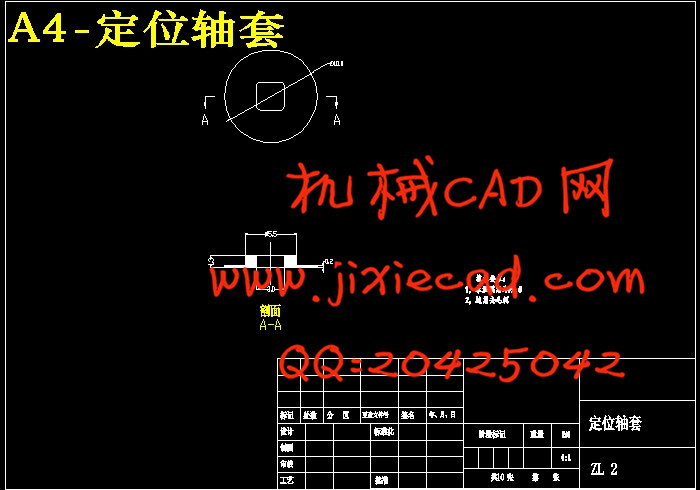
3.1 蛇形机器人运动部件设计………………………………………………………..16
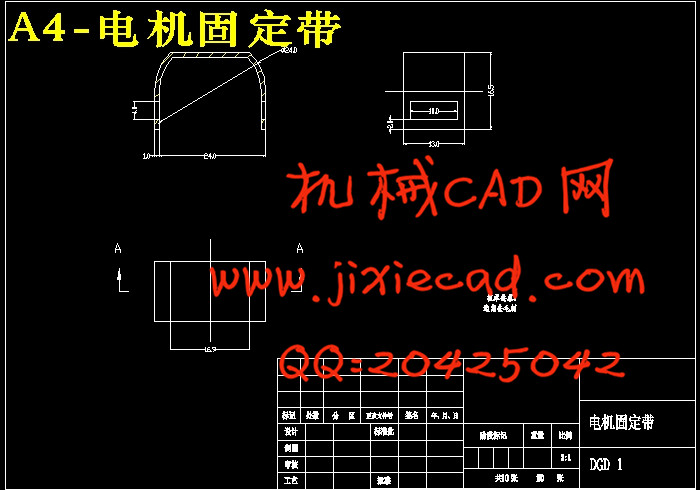
3.2 驱动装置设计………………………………………………………………………22
3.2.1 驱动方式选择……………………………………………………………… 22
3.2.2 电机选择…………………………………………………………………… 24
3.2.3 传动装置设计……………………………………………………………… 25
4 控制系统的总体结构…………… ………………………………………………… 27
4.1 单片机控制…………………………………………………………………………27
4.2 基于CAN总线单片机控制……………………………………………………….28
4.2.1 无线传输模块的应用…………………………………………………………20
4.2.2 下位单片机系统………………………………………………………………31
4.3 控制程序编写………………………………………………………………………36
4.3.1 上位单片机的控制程序………………………………………………………36
4.3.2 下位单片机的控制程序………………………………………………………36
4.4 小结………………………………………………………………………………. 37
结论 ……………………………………………………………………………………38
致谢 ……………………………………………………………………………………39
参考文献………………………………………………………………………………40
关键词:蛇形机器人,结构设计,步态规划,控制系统
Abstract
This paper presents a snake-like robot, and carries out the planning of its straight line gait. The section focuses on the triangular wave advance mechanism of the snake-like robot when it does some straight line gait movement, analyzes the movement of triangular wave advance mechanism using flat screw bodies’ knowledge and designs the structure and PRO/ENGINEER simulation of the snake-like robot. Combined with the problems of the specific assembly, a solution of the eccentricity is proposed in detail. Finally, the snake-like robot’s control system is studied, and put forward a PC -wireless transmission-UART serial –computer—lower computer- decentralized control of drive motor, centralized control mode.
Keywords snake-like robot , Physical design , Step state plans , Control system
目 次
1 引言……………………………………………………………………………………… 1
1.1 仿蛇形机器人的原理及研究热点………………………………………………….3
1.2 仿蛇形机器人的研究意义………………………………………………………….4
1.3 蛇形机器人的优缺点和用途……………………………………………………….4
1.3.1 蛇形机器人的优点…………………………………………………………. 5
1.3.2 蛇形机器人的缺点………………………………………………………… 6
1.3.3 蛇形机器人的应用…………………………………………………………..6
1.4 课题研究内容……………………………………………………………………….7
2 蛇形机器人的机构设计………….…………………………………………………9
2.1 蠕动原理 …………… …………………………………………………………… 9
2.2 蠕动步态规划 ………………… …….………………………………………… 9
2.2.1 三动杆蠕动步态描述…………………………………………………… .10
2.2.2 由三连杆组成的蠕动步态波形传递模型……………………………… …11
2.2.3 波形传递阶段相邻连杆间相对角位移φi及其角速度分析……………….12
2.2.4 小结………………………………………………………………………… 14
2.3 机构简图……………………………………………………………………………14
3 蛇形机器人步行机构的结构设计…………………………………………………16
3.1 蛇形机器人运动部件设计………………………………………………………..16
3.2 驱动装置设计………………………………………………………………………22
3.2.1 驱动方式选择……………………………………………………………… 22
3.2.2 电机选择…………………………………………………………………… 24
3.2.3 传动装置设计……………………………………………………………… 25
4 控制系统的总体结构…………… ………………………………………………… 27
4.1 单片机控制…………………………………………………………………………27
4.2 基于CAN总线单片机控制……………………………………………………….28
4.2.1 无线传输模块的应用…………………………………………………………20
4.2.2 下位单片机系统………………………………………………………………31
4.3 控制程序编写………………………………………………………………………36
4.3.1 上位单片机的控制程序………………………………………………………36
4.3.2 下位单片机的控制程序………………………………………………………36
4.4 小结………………………………………………………………………………. 37
结论 ……………………………………………………………………………………38
致谢 ……………………………………………………………………………………39
参考文献………………………………………………………………………………40