设计简介
摘 要
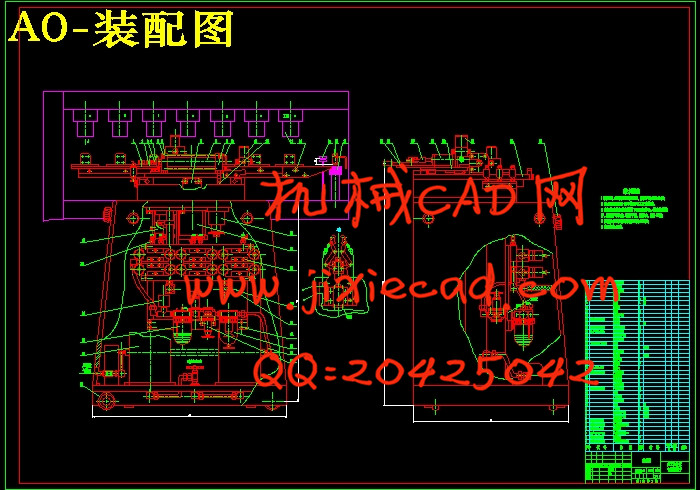
本文主要介绍了冲床上下料机械手的设计过程。在查阅了一系列参考资料以后,根据所给任务,参阅国内的设计情况,选用圆柱座标和三自由度。机械手的各执行机构,包括:手部、手腕、手臂、支柱等部。用机械手来抓取工件。
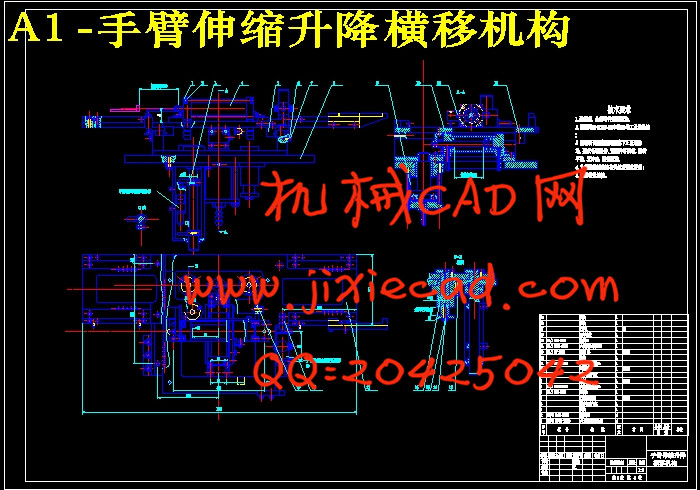
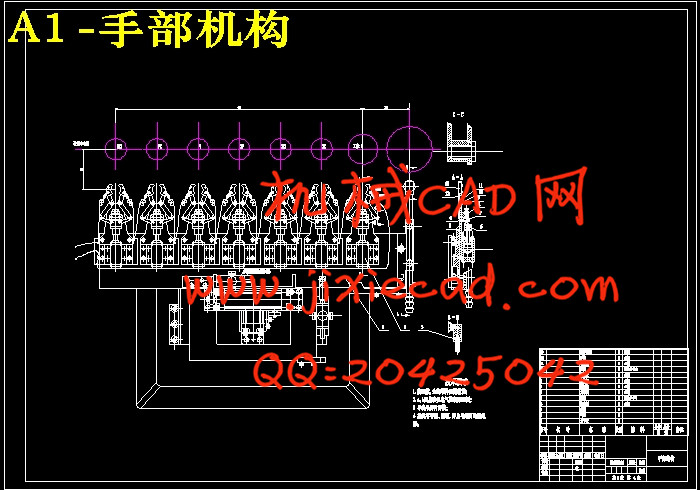
在分析了具体工作要求,对个方案进行对比之后,综合考虑各个因素。机械手腰部的旋转运动需要一定的定位控制精度,故采用步进电机驱动来实现;因为采用液压执行缸来做水平手臂和垂直手臂,故大小臂均采用液压驱动;机械手的手部结构设计,因为工件是板料,使用机械手,采用气动驱动。
关键词:冲床 机械手 气动驱动
Abstract
The present paper mainly introduced on the punch press the yummy treats manipulator's design process. After having consulted a series of reference, refers to the domestic design situation. Selects the circular cylindrical coordinate and three degrees-of-freedom. Manipulator's each implementing agency, including: Hand, arm and so on. Absorbs the sheet work piece with the air current negative pressure type sucker. In has analyzed the concrete work requirement, carries on the contrast after a plan, overall evaluation each factor. The manipulator waist's rotary motion needs certain positioning control precision, therefore uses step-by-steps the motor-driven to realize; Because uses the hydraulic pressure execution cylinder to make the horizontal arm and the vertical arm, therefore the big and small arm uses the hydraulic pressure actuation; Manipulator's hand structural design, because the work piece is the sheet, use air current negative pressure type sucker. Uses the air-operated drive.
key words: Punch press air-operated drive.
目 录
本文主要介绍了冲床上下料机械手的设计过程。在查阅了一系列参考资料以后,根据所给任务,参阅国内的设计情况,选用圆柱座标和三自由度。机械手的各执行机构,包括:手部、手腕、手臂、支柱等部。用机械手来抓取工件。
在分析了具体工作要求,对个方案进行对比之后,综合考虑各个因素。机械手腰部的旋转运动需要一定的定位控制精度,故采用步进电机驱动来实现;因为采用液压执行缸来做水平手臂和垂直手臂,故大小臂均采用液压驱动;机械手的手部结构设计,因为工件是板料,使用机械手,采用气动驱动。
关键词:冲床 机械手 气动驱动
Abstract
The present paper mainly introduced on the punch press the yummy treats manipulator's design process. After having consulted a series of reference, refers to the domestic design situation. Selects the circular cylindrical coordinate and three degrees-of-freedom. Manipulator's each implementing agency, including: Hand, arm and so on. Absorbs the sheet work piece with the air current negative pressure type sucker. In has analyzed the concrete work requirement, carries on the contrast after a plan, overall evaluation each factor. The manipulator waist's rotary motion needs certain positioning control precision, therefore uses step-by-steps the motor-driven to realize; Because uses the hydraulic pressure execution cylinder to make the horizontal arm and the vertical arm, therefore the big and small arm uses the hydraulic pressure actuation; Manipulator's hand structural design, because the work piece is the sheet, use air current negative pressure type sucker. Uses the air-operated drive.
key words: Punch press air-operated drive.
目 录
第一章.绪论...........................................................1
1.1选题背景................................................................1
1.2设计目的................................................................1
1.3国内外研究现状和趋势....................................................2
1.4机械手概述..............................................................3
1.5机械手的组成............................................................3
第二章.机械手的总体设计.........................................7
2.1机械手总体结构的设计....................................................7
2.2机械手腰座结构的设计....................................................8
2.3机械手手臂的结构设计....................................................9
2.4机械手腕部的结构设计....................................................10
2.5机械手的手部结构方案设计................................................11
2.6机械手的机械传动机构的设计..............................................12
2.7机械手驱动系统的设计....................................................14
2.8机械手的缓冲方案设计....................................................19
第三章.设计时具体问题...........................................21
3.1手部夹紧气缸的设计......................................................21
3.2气缸的直径..............................................................22
3.3缸筒壁厚的设计..........................................................24
第四章.手臂运动的尺寸设计与校核.............................25
4.1手臂伸缩气缸的尺寸设计与校核............................................25
1.1选题背景................................................................1
1.2设计目的................................................................1
1.3国内外研究现状和趋势....................................................2
1.4机械手概述..............................................................3
1.5机械手的组成............................................................3
第二章.机械手的总体设计.........................................7
2.1机械手总体结构的设计....................................................7
2.2机械手腰座结构的设计....................................................8
2.3机械手手臂的结构设计....................................................9
2.4机械手腕部的结构设计....................................................10
2.5机械手的手部结构方案设计................................................11
2.6机械手的机械传动机构的设计..............................................12
2.7机械手驱动系统的设计....................................................14
2.8机械手的缓冲方案设计....................................................19
第三章.设计时具体问题...........................................21
3.1手部夹紧气缸的设计......................................................21
3.2气缸的直径..............................................................22
3.3缸筒壁厚的设计..........................................................24
第四章.手臂运动的尺寸设计与校核.............................25
4.1手臂伸缩气缸的尺寸设计与校核............................................25
4.2手臂升降气缸的尺寸设计与校核............................................27
4.3手臂横移气缸的尺寸设计与校核............................................28
第五章.理论分析和设计计算.....................................30
5.1液压传动系统设计计算....................................................30
5.2电机选型有关参数计算....................................................36
5.3其他元件的选定..........................................................39
结论....................................................................40
致谢.....................................................................41
参考文献..............................................................42
4.3手臂横移气缸的尺寸设计与校核............................................28
第五章.理论分析和设计计算.....................................30
5.1液压传动系统设计计算....................................................30
5.2电机选型有关参数计算....................................................36
5.3其他元件的选定..........................................................39
结论....................................................................40
致谢.....................................................................41
参考文献..............................................................42