设计简介
中文摘要
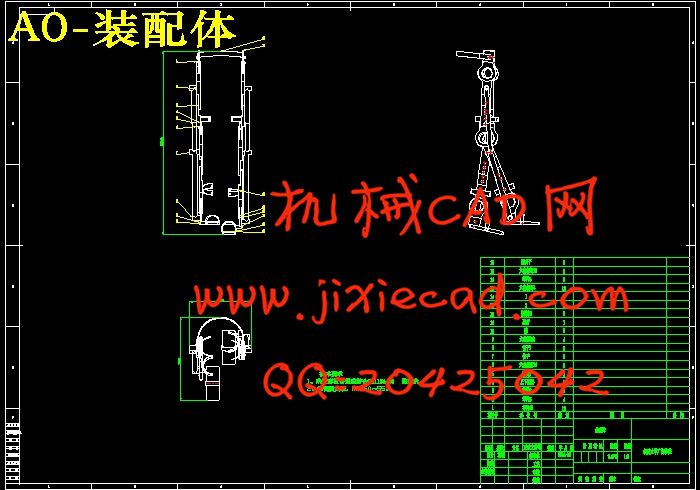
本文研究穿戴式机械腿机构。穿戴式机械腿是一种典型的人机一体化系统,该机构是一种穿戴于人体腿部帮助有下肢乏力的患者进行康复治疗的机械结构。本文在人-机相容性方面做了详细的分析,使本机构在较好的穿戴位形下依靠人体的运动信息控制穿戴式机器人,在运动过程中提高人机步态的一致性,达到更好的康复治疗的目的。
分析了国内外研究现状,了解了国内外相关研究的背景情况、研究进展和未来的发展问题,总结了下肢康复机器人研究中还存在的问题,进而确定了本文的主要研究内容及所需解决的关键问题。
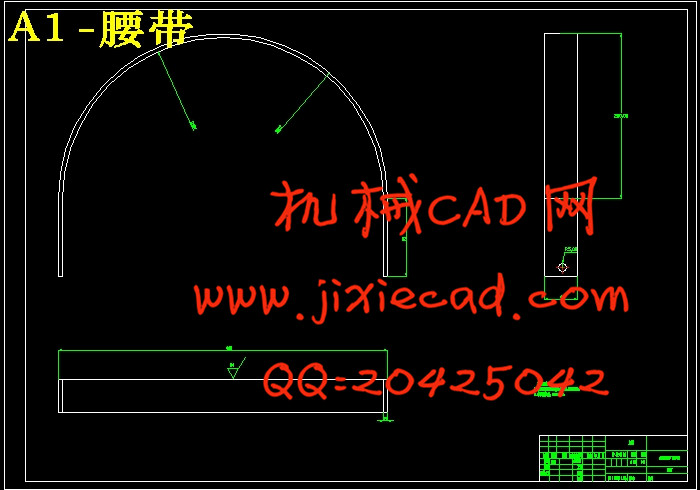
本文确定了下肢康复机器人机构的自由度,对机构进行了关节布位,通过自由度的分析对人-机联接模式和约束性质进行了研究,从而确定了骨骼-机构联体模型。在人体骨骼模型的基础上,提出了一种机构构型方案。对人-机相容性进行了定义,分析了人-机相容性的影响因素。在此基础上分别对人体下肢骨骼模型和这种机构构型进行了三维模型设计。
关键词:康复机器人,人-机相容性,机构设计
Abstract
This study discusses lower extremity rehabilitative robot. The lower extremity rehabilitative robot is a typical man-machine integrated system; it is worn on the body of a limb to help patients with physical disabilities rehabilitation of mechanical devices. In this paper, man-machine compatibility has done more analysis and with well wearing this equipment to rely on the human body configuration under the control of lower extremity rehabilitative robot motion information. It improves the consistency rehabilitation of human gait in the course of the campaign to achieve better purposes.
This paper analyzes the research situation and has a research about the background of relevant research at home and abroad, progress of research and future development. Lower extremity rehabilitation robot research summarized the problems still exist, and then this article determines the main contents, and the key issues need to be resolved.
This paper has identified the DOF of lower extremity rehabilitative robot and the joint distribution of digital agencies. Through the analysis in freedom this article do the research on the human-machine connection mode and the nature binding. Two programs of mechanism are proposed based on the bone一body conjoined model. The study defines the compatibility of human-machine and analyzes the compatibility factors of human-machine. On this basis, the human skeleton model and the configuration of the two agencies are conducted by the three-dimensional model design respectively.
Keywords: rehabilitative robotics, man-machine compatibility, mechanism design
目 录
中文摘要......................................................................................................................I
Abstract .......................................................................................................................II
第一章 绪论.............................................................................................................1
1.1研究背景..................................................................................................................1
1.2下肢康复机器人概况 ....................................................................................2
1.2.1康复机器人研究历史.................................................................................2
1.2.2下肢康复机器人分类.............................................................3
1.3下肢康复机器人的研究现状...............................................................................5
1.3.1国外研究现状.......................................................................................5
1.3.2国内研究现状.................................................................................;.....9
1.4下肢康复机器人研究存在的问题........................................................11
1.5课题意义及主要研究内容...............................................................................11
第二章 穿戴式机械腿机构运动分析..................................................13
2.1 引言..................................................................................................13
2.2人体下肢生物骨骼模型...................................................................................13
2.3骨骼的运动与下肢关节.........................................................................13
第三章 穿戴式机械腿机构设计.......................................................19
3.1穿戴式机械腿设计.......................................................................................19
3.1.1三维模型设计.......................................................................................19
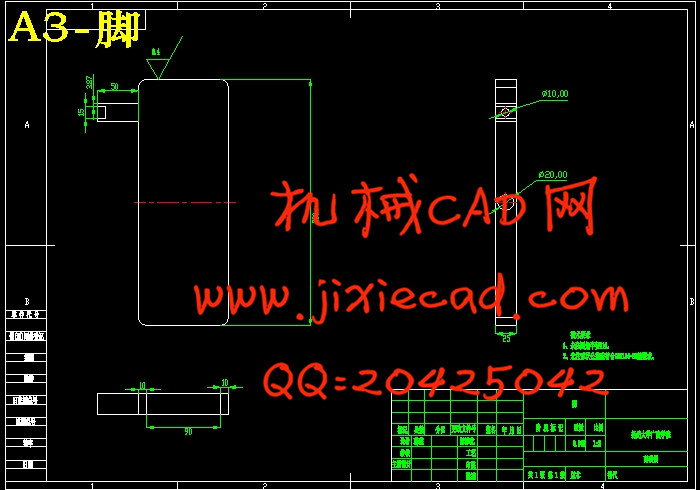
3.1.2膝关节、踝关节及脚部设计...........................................................................21
3.1.3下肢连接器...........................................................................................26
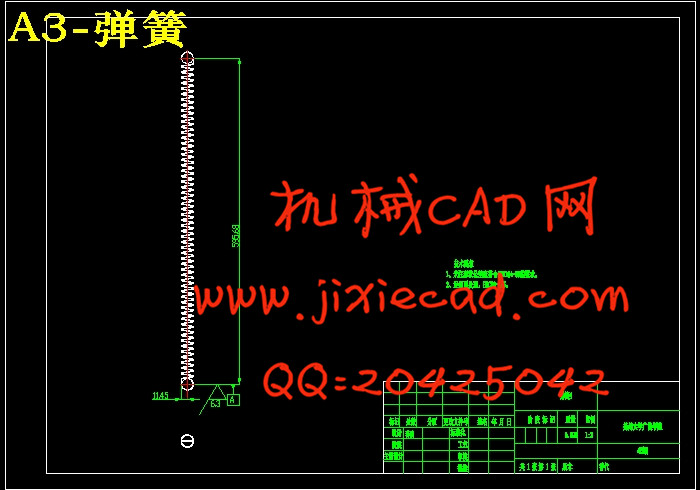
3.1.4大小腿弹簧助力器及保护...........................................................26
3.1.5下肢骸部设计.........................................................................................28
3.1.6 腿部固定............................................................................................30
第四章 强度校核.........................................................................................31
4.1关节旋转连接器受力分析.....................................................................31
设计总结.............................................................................................34
参考文献...............................................................................................36
致谢.....................................................................................................38
本文研究穿戴式机械腿机构。穿戴式机械腿是一种典型的人机一体化系统,该机构是一种穿戴于人体腿部帮助有下肢乏力的患者进行康复治疗的机械结构。本文在人-机相容性方面做了详细的分析,使本机构在较好的穿戴位形下依靠人体的运动信息控制穿戴式机器人,在运动过程中提高人机步态的一致性,达到更好的康复治疗的目的。
分析了国内外研究现状,了解了国内外相关研究的背景情况、研究进展和未来的发展问题,总结了下肢康复机器人研究中还存在的问题,进而确定了本文的主要研究内容及所需解决的关键问题。
本文确定了下肢康复机器人机构的自由度,对机构进行了关节布位,通过自由度的分析对人-机联接模式和约束性质进行了研究,从而确定了骨骼-机构联体模型。在人体骨骼模型的基础上,提出了一种机构构型方案。对人-机相容性进行了定义,分析了人-机相容性的影响因素。在此基础上分别对人体下肢骨骼模型和这种机构构型进行了三维模型设计。
关键词:康复机器人,人-机相容性,机构设计
Abstract
This study discusses lower extremity rehabilitative robot. The lower extremity rehabilitative robot is a typical man-machine integrated system; it is worn on the body of a limb to help patients with physical disabilities rehabilitation of mechanical devices. In this paper, man-machine compatibility has done more analysis and with well wearing this equipment to rely on the human body configuration under the control of lower extremity rehabilitative robot motion information. It improves the consistency rehabilitation of human gait in the course of the campaign to achieve better purposes.
This paper analyzes the research situation and has a research about the background of relevant research at home and abroad, progress of research and future development. Lower extremity rehabilitation robot research summarized the problems still exist, and then this article determines the main contents, and the key issues need to be resolved.
This paper has identified the DOF of lower extremity rehabilitative robot and the joint distribution of digital agencies. Through the analysis in freedom this article do the research on the human-machine connection mode and the nature binding. Two programs of mechanism are proposed based on the bone一body conjoined model. The study defines the compatibility of human-machine and analyzes the compatibility factors of human-machine. On this basis, the human skeleton model and the configuration of the two agencies are conducted by the three-dimensional model design respectively.
Keywords: rehabilitative robotics, man-machine compatibility, mechanism design
目 录
中文摘要......................................................................................................................I
Abstract .......................................................................................................................II
第一章 绪论.............................................................................................................1
1.1研究背景..................................................................................................................1
1.2下肢康复机器人概况 ....................................................................................2
1.2.1康复机器人研究历史.................................................................................2
1.2.2下肢康复机器人分类.............................................................3
1.3下肢康复机器人的研究现状...............................................................................5
1.3.1国外研究现状.......................................................................................5
1.3.2国内研究现状.................................................................................;.....9
1.4下肢康复机器人研究存在的问题........................................................11
1.5课题意义及主要研究内容...............................................................................11
第二章 穿戴式机械腿机构运动分析..................................................13
2.1 引言..................................................................................................13
2.2人体下肢生物骨骼模型...................................................................................13
2.3骨骼的运动与下肢关节.........................................................................13
第三章 穿戴式机械腿机构设计.......................................................19
3.1穿戴式机械腿设计.......................................................................................19
3.1.1三维模型设计.......................................................................................19
3.1.2膝关节、踝关节及脚部设计...........................................................................21
3.1.3下肢连接器...........................................................................................26
3.1.4大小腿弹簧助力器及保护...........................................................26
3.1.5下肢骸部设计.........................................................................................28
3.1.6 腿部固定............................................................................................30
第四章 强度校核.........................................................................................31
4.1关节旋转连接器受力分析.....................................................................31
设计总结.............................................................................................34
参考文献...............................................................................................36
致谢.....................................................................................................38