设计简介
摘要
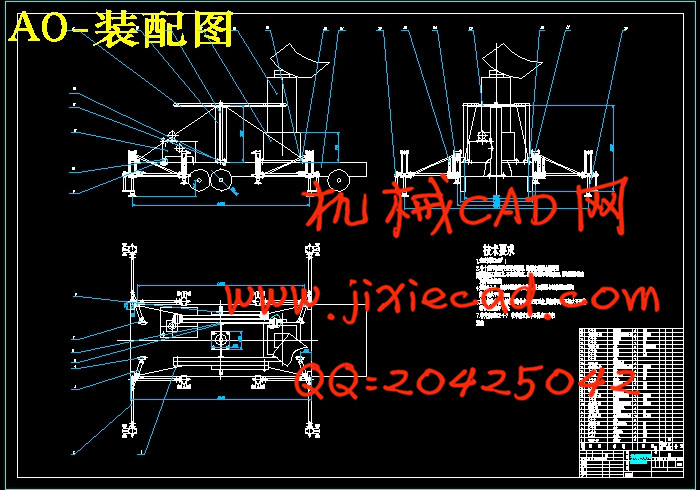
在现代战争的信息对抗中,雷达作为敌我双方信息系统中的主要传感器,已经成为战争初期被攻击的首要目标之一。因此,能提高雷达的机动性从而提高其生存能力的车载雷达成为军事侦察中的重要发展趋势。
车载雷达的调平控制系统是影响其机动性的重要因素之一,鉴于国内车载雷达手动调平和电液式自动调平控制系统的缺点,本论文研究的机电式自动调平控制系统,以ATMELAVR微控制器作为系统控制核心,采用高精度的双轴倾角传感器和全数字式交流伺服系统,旨在提高车载雷达平台调平控制系统的两个关键性能指标:调平时间和调平精度。
本文首先建立了车载雷达平台在水平和倾斜两种状态的静力学模型,然后以“线图法"和“键图法”建立了支腿系统的动力学模型,给出了系统输入和输出之间的函数表达式。在此基础上研究了车载平台当前常用的调平策略,提出了“循环多次”调平法。
在控制系统总体设计一章中,介绍了系统的设计要求、控制系统方案选择依据,控制系统软、硬件开发工具以及控制系统软、硬件的总体设计思想。
在控制系统硬件设计及实现一章中,系统采用ATmega8515和ATmegal62微控制器,完成了对人机界面单元、系统主控单元和系统接口单元的电路设计和PCB制作,给出了本控制系统硬件设计的抗干扰技术。
在控制系统软件设计及实现一章中,采用C语言,完成了对人机界面单元和系统主控单元的驱动程序设计和代码编制,并采用三角函数加减速算法改善了系统起停时的整车性能,同时将“循环多次"调平法应用于程序设计中,优化了系统调平过程中的动态性能;鉴于在野外和战场上平台水平度破坏的可能性,提出了“二次调平”的概念及其实施方法;本章最后给出了控制系统驱动程序设计的抗干扰技术。
控制系统完成了软、硬件调试之后,将其应用于某型号19T的车载雷达平台进行现场试验,试验非常成功,系统调平精度和调平时间都优于设计要求。
本系统的建模方法、调平策略以及控制系统软、硬件设计方法可用于不同型号的车载雷达平台、车载导弹平台和车载激光武器平台,也可应用于工业工程领域的静力压桩机、沥青混凝土摊铺机等工程机械。
关键词:车载平台,调平,AVR,伺服控制
ABSTRACT
In the information counterwork of modem war, radar, as a main sensor in the information system of both campaign sides,is always the preferred aim of attack in the early stage of battle.The vehicle-borne radar, which has the function of improving the mobile character of radar to increase its survivor probability, becomes the concernful trend of
military scout.
The auto-1eveling control system plays an important role in the mobile character of vehicle-bome radar. Aiming at the shortcomings of traditional manual leveling system and hydraulic auto-1eveling system,an electromechanical auto-leveling control system is presented.By using ATMEL ATmega8515 and ATmegal62 as microcontroller, adopting highly accurate two-axis tilt sensor and digital AC servo-system as sensor and actuators,the propose of the control system is to improve the key factors of leveling system:the1cycling time and leveling accuracy.
Firstly, the statics model of vehicle-borne radar platform both in the horizontal and declining states are established.Then,the dynamic model of leg is built by using the methods of “linear graph’’and‘'bond graph”,and the function expressing the relationship of input and output is given.After that,a new leveling strategy is put for ward based on the research of the normal leveling strategy.
In the chapter of control system total design,the system design requirement,the control system framework,the research and development tools for me system and the software and hardware total design plan are introduced.
In the chapter of control system hardware design,by using ATMEL ATmega8515 and ATmega162 microcontrollers,the circuits and PCBs design of the human-machine interface cell,control center cell and system interface cell are realized.At the end of this chapter, the anti-interference technology in the hardware design of control system is discussed.
In the Chapter of control system software design,by adopting C language,the driving progreams of the human- machine interface cell and control center cell are designed.The vehicle performance in the time of starting and stop is improved by using the trigonometric function as the acceleration and deceleration algorithm,at the same time,the new circular leveling strategy is applied in the system to optimize the dynamic performance in the progress of auto-leveling.Aiming at the possibility of destroy of horizontal accuracy in the wild field or battlefield,the paper put for ward the concept of “second leveling'’ and its actualizing method.At the end of this chapter, the anti-interference technology in thecontr01 system software design is discussed·
At 1ast, the control system is applied to a 19T vehicle-bome radar platform after the debugging of the hardware and software in the laboratory. The test is very successful and proves the leveling time and leveling accuracy is better than designer’s expectation.
The modeling method,leveling strategy and the hardware and software of system can be applied to diversified model of vehicle—borne radar platform,vehicle-borne missile platform and vehicle-borne laser platform,and can be also used in the industrial engineering such as static pile drive and bituminous-concrete pavers.
Key words:vehicle-borne platform,leveling,AVR,servo ,control
目 录
摘要 1在现代战争的信息对抗中,雷达作为敌我双方信息系统中的主要传感器,已经成为战争初期被攻击的首要目标之一。因此,能提高雷达的机动性从而提高其生存能力的车载雷达成为军事侦察中的重要发展趋势。
车载雷达的调平控制系统是影响其机动性的重要因素之一,鉴于国内车载雷达手动调平和电液式自动调平控制系统的缺点,本论文研究的机电式自动调平控制系统,以ATMELAVR微控制器作为系统控制核心,采用高精度的双轴倾角传感器和全数字式交流伺服系统,旨在提高车载雷达平台调平控制系统的两个关键性能指标:调平时间和调平精度。
本文首先建立了车载雷达平台在水平和倾斜两种状态的静力学模型,然后以“线图法"和“键图法”建立了支腿系统的动力学模型,给出了系统输入和输出之间的函数表达式。在此基础上研究了车载平台当前常用的调平策略,提出了“循环多次”调平法。
在控制系统总体设计一章中,介绍了系统的设计要求、控制系统方案选择依据,控制系统软、硬件开发工具以及控制系统软、硬件的总体设计思想。
在控制系统硬件设计及实现一章中,系统采用ATmega8515和ATmegal62微控制器,完成了对人机界面单元、系统主控单元和系统接口单元的电路设计和PCB制作,给出了本控制系统硬件设计的抗干扰技术。
在控制系统软件设计及实现一章中,采用C语言,完成了对人机界面单元和系统主控单元的驱动程序设计和代码编制,并采用三角函数加减速算法改善了系统起停时的整车性能,同时将“循环多次"调平法应用于程序设计中,优化了系统调平过程中的动态性能;鉴于在野外和战场上平台水平度破坏的可能性,提出了“二次调平”的概念及其实施方法;本章最后给出了控制系统驱动程序设计的抗干扰技术。
控制系统完成了软、硬件调试之后,将其应用于某型号19T的车载雷达平台进行现场试验,试验非常成功,系统调平精度和调平时间都优于设计要求。
本系统的建模方法、调平策略以及控制系统软、硬件设计方法可用于不同型号的车载雷达平台、车载导弹平台和车载激光武器平台,也可应用于工业工程领域的静力压桩机、沥青混凝土摊铺机等工程机械。
关键词:车载平台,调平,AVR,伺服控制
ABSTRACT
In the information counterwork of modem war, radar, as a main sensor in the information system of both campaign sides,is always the preferred aim of attack in the early stage of battle.The vehicle-borne radar, which has the function of improving the mobile character of radar to increase its survivor probability, becomes the concernful trend of
military scout.
The auto-1eveling control system plays an important role in the mobile character of vehicle-bome radar. Aiming at the shortcomings of traditional manual leveling system and hydraulic auto-1eveling system,an electromechanical auto-leveling control system is presented.By using ATMEL ATmega8515 and ATmegal62 as microcontroller, adopting highly accurate two-axis tilt sensor and digital AC servo-system as sensor and actuators,the propose of the control system is to improve the key factors of leveling system:the1cycling time and leveling accuracy.
Firstly, the statics model of vehicle-borne radar platform both in the horizontal and declining states are established.Then,the dynamic model of leg is built by using the methods of “linear graph’’and‘'bond graph”,and the function expressing the relationship of input and output is given.After that,a new leveling strategy is put for ward based on the research of the normal leveling strategy.
In the chapter of control system total design,the system design requirement,the control system framework,the research and development tools for me system and the software and hardware total design plan are introduced.
In the chapter of control system hardware design,by using ATMEL ATmega8515 and ATmega162 microcontrollers,the circuits and PCBs design of the human-machine interface cell,control center cell and system interface cell are realized.At the end of this chapter, the anti-interference technology in the hardware design of control system is discussed.
In the Chapter of control system software design,by adopting C language,the driving progreams of the human- machine interface cell and control center cell are designed.The vehicle performance in the time of starting and stop is improved by using the trigonometric function as the acceleration and deceleration algorithm,at the same time,the new circular leveling strategy is applied in the system to optimize the dynamic performance in the progress of auto-leveling.Aiming at the possibility of destroy of horizontal accuracy in the wild field or battlefield,the paper put for ward the concept of “second leveling'’ and its actualizing method.At the end of this chapter, the anti-interference technology in thecontr01 system software design is discussed·
At 1ast, the control system is applied to a 19T vehicle-bome radar platform after the debugging of the hardware and software in the laboratory. The test is very successful and proves the leveling time and leveling accuracy is better than designer’s expectation.
The modeling method,leveling strategy and the hardware and software of system can be applied to diversified model of vehicle—borne radar platform,vehicle-borne missile platform and vehicle-borne laser platform,and can be also used in the industrial engineering such as static pile drive and bituminous-concrete pavers.
Key words:vehicle-borne platform,leveling,AVR,servo ,control
目 录
第一章 绪论 1
1.1论文研究背景 1
1.2国内外车载平台调平系统的发展状况 2
1.3论文的研究内容 3
第二章 车载平台的建模及其调平方法研究 4
2.1 概述 4
2.2车载平台的静力学建模 4
2.2.1车载平台水平状态下的静力学建模 4
2.2.2车载平台非水平状态下的静力学建模 5
2.3车载平台支腿系统的动力学建模 8
2.3.1支腿系统物理模型 9
2.3.2支腿系统线图模型 9
2.3.3支腿系统键图模型 11
2.4 车载平台调平方法研究 12
2.4.1几种常见的调平方法及比较 13
2.4.2调平方法的分析 13
2.4.3调平方法的确定 15
第三章 自动调平控制系统总体设计 16
3.1调平系统设计要求 16
3.2控制系统体系结构选择 16
3.3基于AVR微控制器的自动调平控制系统硬件总体设计 17
3.3.1系统传感器 17
3.3.1.1双轴倾角传感器 17
3.3.1.2霍尔传感器 18
3.3.2系统执行器 19
3.4基于AVR微控制器的自动调平控制系统驱动程序总体设计 20
第四章 自动调平控制系统硬件电路设计及实现 22
4.1人机界面单元电路设计 22
4.1.1 ATmega8515最小系统电路设计 22
4.1.2倾角传感器信号接收和按键信号传输电路设计 24
4.1.3倾角传感器信号实时液晶显示电路设计 25
4.1.4按键信号识别电路设计 26
4.2系统主控单元控制电路设计 27
4.2.1 ATmegal62最小系统电路设计 27
4.2.2倾角传感器和按键信号接收电路设计 28
4.2.3 LED指示电路设计 29
4.2.4系统主控单元和系统接口单元控制信号的传输电路设计 29
4.3系统接口单元控制电路设计 29
4.3.1系统接口单元DC5V供电电源电路设计 29
4.3.2系统接口单元和系统主控单元信号传输接口电路的设计 30
4.3.3差分电路设计 30
4.3.4光隔电路设计 31
4.3.5霍尔传感器信号接收接口电路设计 31
4.3.6继电器及其控制电路设计 32
第五章 自动调平控制系统驱动程序设计及实现 33
5.1人机界面单元驱动程序设计及实现 33
5.1.1双轴倾角传感器信号接收和显示驱动程序设计及实现 33
5.1.1.1 USART初始化子程序设计及代码编制 34
5.1.1.2 USART数据接收子程序设计及代码编制【41】 35
5.1.1.3传感器数据读取和处理子程序设计及代码编制 36
5.1.1.4 LCD驱动程序设计及代码编制 37
5.2系统主控单元驱动程序设计及实现 43
5.2.1系统调平驱动程序设计及实现 45
5.2.1.1预支承驱动程序设计及代码编制 47
5.2.1.2确定最高点驱动程序设计及代码编制 49
5.2.1.3计算支腿移动量驱动程序设计及代码编制 50
5.2.1.4系统调平驱动程序设计及代码编制 51
5.2.1.5支腿锁定驱动程序设计及代码编制 52
5.2.1.6支腿回收驱动程序设计及代码编制 53
5.3“二次调平”的提出和实现 55
第六章 结论 57
感 谢 59
参考文献 60