设计简介
摘 要
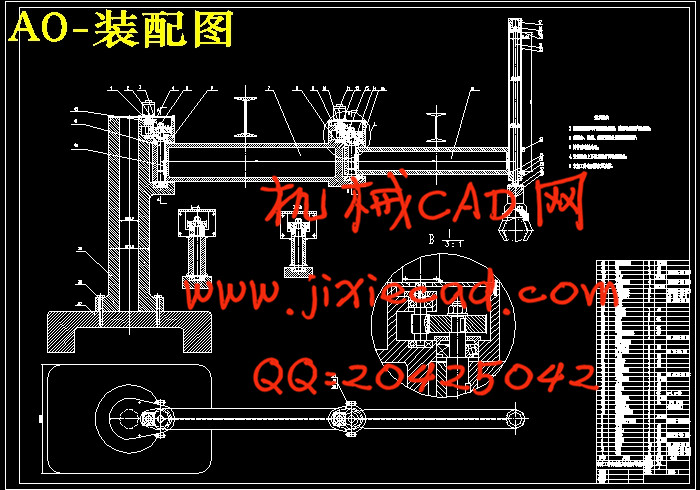
随着工业自动化的发展,工业机械手的应用越来越普遍,已被广泛地应用于各行各业中。首先,简要介绍了机械手的基本概念、机械手的组成和分类,以及工业机械手的简史和发展趋势。其次,本文通过车床机械手的动作分析,确定了机械手的坐标形式、自由度和驱动机构,确定了机械手的主要技术参数;完成了送料机械手的总体方案设计。再次,完成了机械手的手部、臂部和机身的结构设计。最后,通过对机械手的动作行程分析,完成了机械手的气缸设计和气元件的选择;设计了可满足车床使用的机械手关键词:机械手 ,工业自动化,结构设计,气缸
Abstract
With the development of industrial automation ,the industrial manipulators are used widely. They are applied in kinds of industry. Firstly ,it introduced briefly the basic concept of the robot, the composition and classification of robot ,the development history of industrial robots and development trends of industrial robots. Secondly, to analyzing the process of automatic production line for camshaft pump feeding robot,I have determined the coordinates form,the number of freedom and drive mechanismthe of manipulator, identified the main technical parameters of mechanical hand,completed the overall design of automatic line feed pump camshaft mechanical hand. Thirdly,I have completed the structure design of hand, arm and body . Finally, through analysing the movement of mechanical hand,I have completed the design of hydraulic cylinders and the choice of hydraulic components ;I have designed schematic diagram of hydraulic system and the diagram of electrical control to meet the requirements of manipulator's loop movement.Keywords: The mechanical hand, industrial automation, structure design, cylinder
目 录
摘 要 IIIAbstract IV
目 录 V
第1章 绪论 1
1.1机械手概述 1
1.2机械手的组成和分类 2
1.2.1机械手的组成 2
1.2.2机械手的分类 3
1.3课题的提出及主要任务 3
1.3.1课题的提出 3
1.3.2课题的主要任务 4
第2章 机械手的设计方案 4
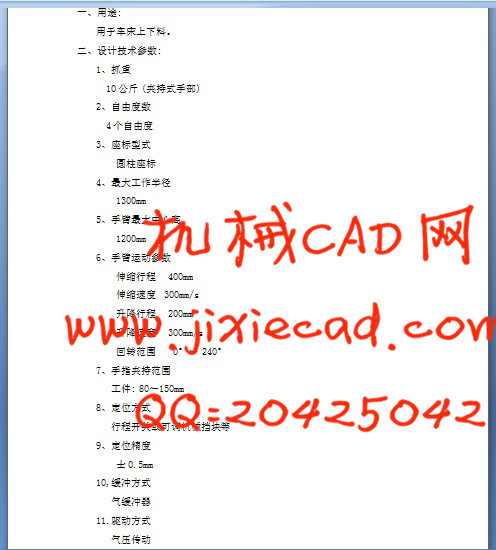
2.1机械手的座标型式与自由度和工作范围 5
2.2 机械手的手部结构方案设计 5
2.3 机械手的手臂结构方案设计 5
2.4机械手的驱动方案设计 6
2.5 机械手的控制方案设计 6
2.6机械手的主要参数 6
2.7机械手的技术参数列表 6
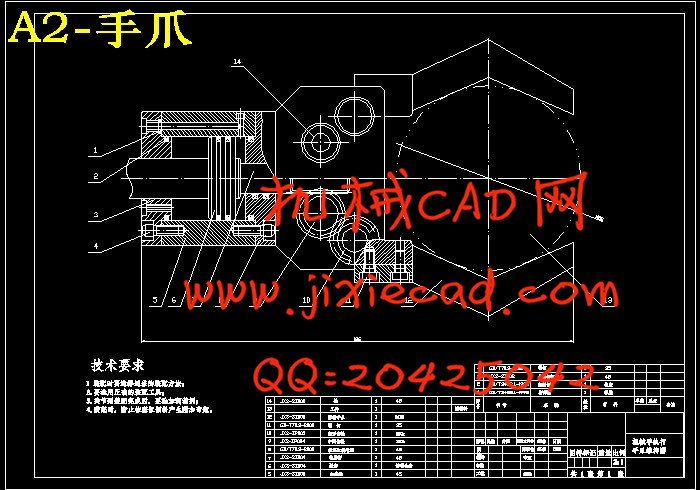
第3章手部结构设计 7
3.1手部设计 8
3.1.1手指的形状和分类 8
3.1.2设计时考虑的几个问题 8
3.2手部夹紧气缸的设计 9
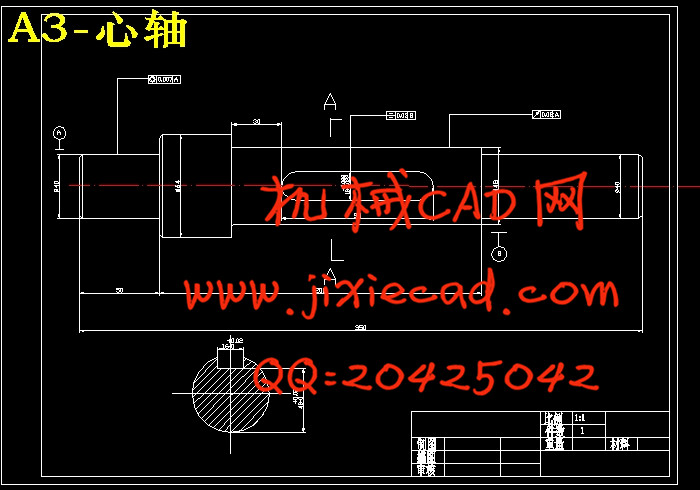
第4章 手臂结构设计 12
4.1手臂伸缩 12
4.1.1结构设计 12
4.1.2手臂伸缩驱动力的计算 12
4.2手臂升降和回转部分 13
4.2.1结构设计 13
4.3手臂伸缩气缸的设计 13
4.4 气压系统主要参数 17
4.4.1气缸和气马达的设计计算 17
4.4.2 气压元件的选择 18
4.5气压原理图 21
总结与展望 23
参考文献 24
致 谢 25