设计简介
目 录
中文摘要 I
英文摘要 II
1 绪 论 1
1.1引言 1
1.2国内外相关领域的研究现状 2
1.2.1国外全方位移动机器人的研究现状 2
1.2.2国内全方位移动机器人的研究现状 4
1.3主要研究内容 5
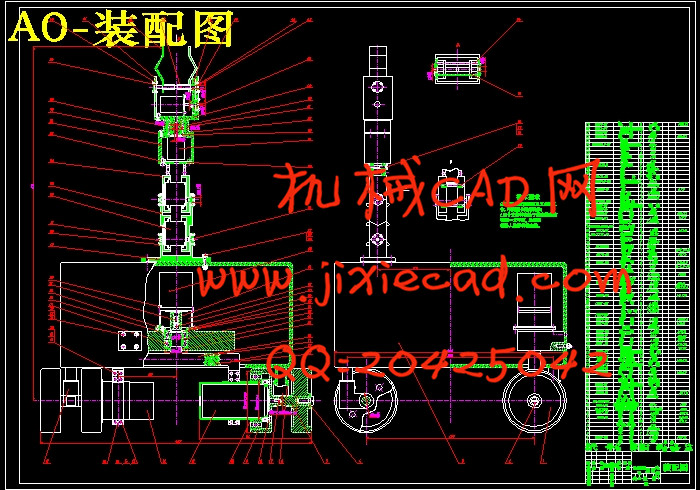
2 全向移动机器人移动机构设计 6
2.1引言 6
2.2机械设计的基本要求 6
2.3全方位轮式移动机构的研制 7
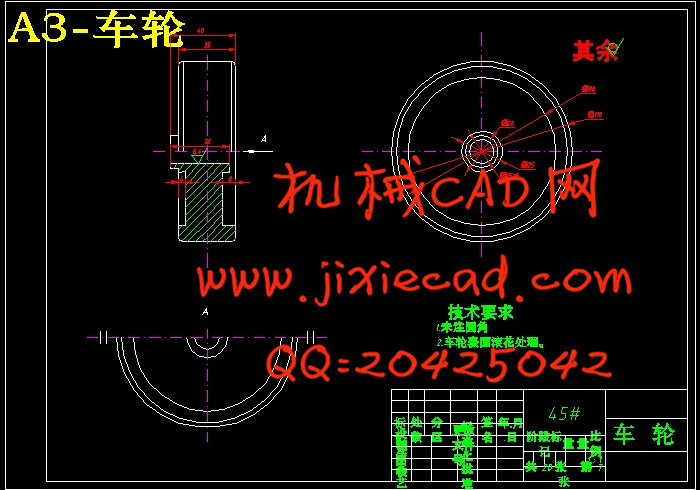
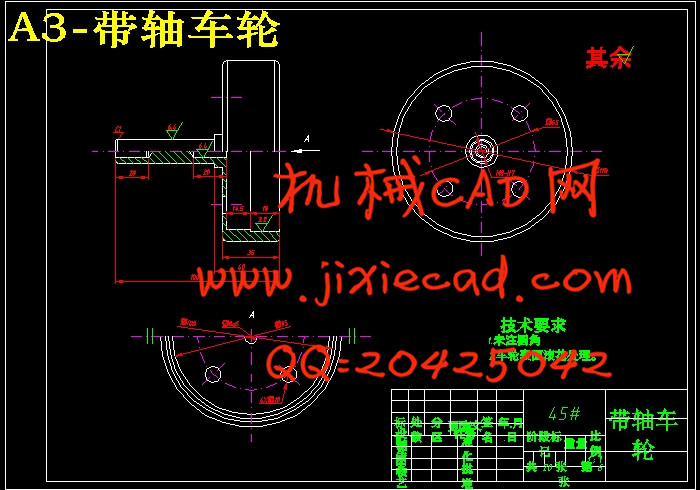
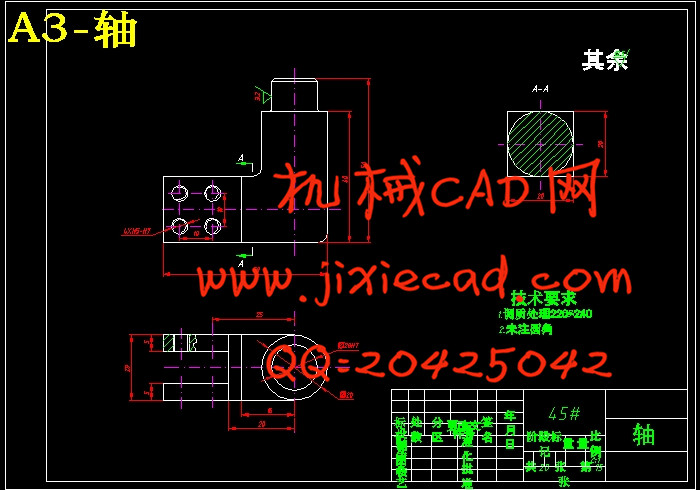
2.3.1移动机器人车轮旋转机构设计 7
2.3.2移动机器人转向机构设计 9
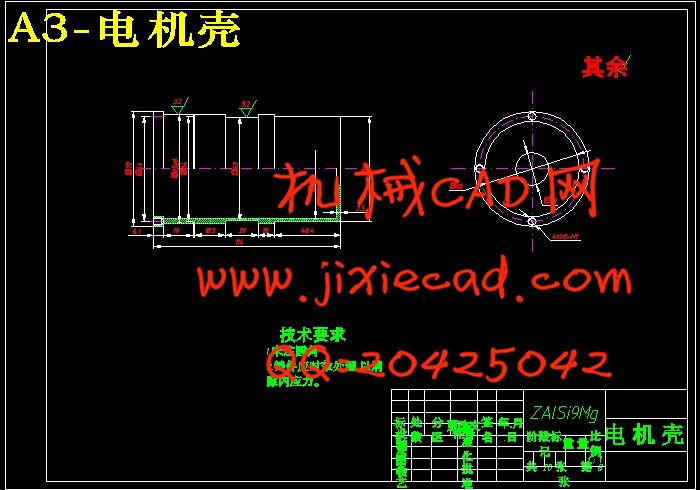
2.3.3电机的选型与计算 12
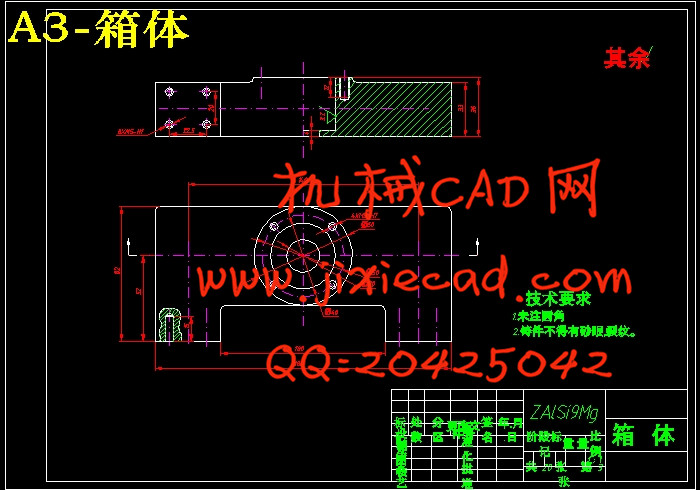
2.4移动机器人车体结构设计 15
2.5本章小结 15
3 机械手臂的设计 16
3.1末端执行器的设计 16
3.1.1末端执行器设计要求 16
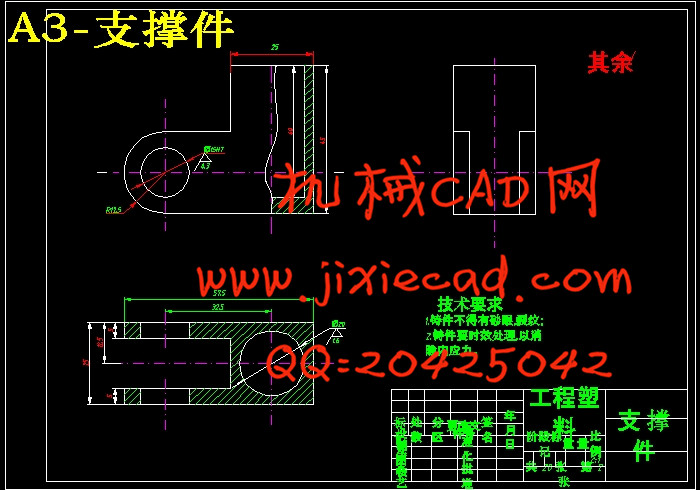
3.1.2末端执行器的设计 17
3.1.3电机的选型与计算 18
3.2机械手臂杆件的设计 19
3.2.1腕部结构设计 19
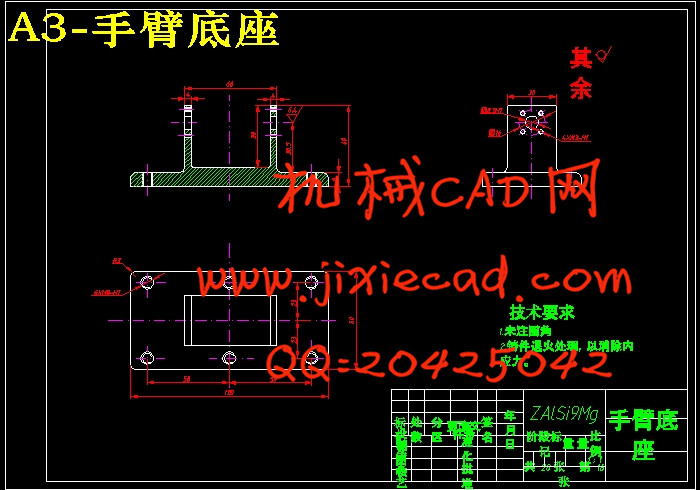
3.2.2臂部结构设计 20
3.2.3机械臂电机的选型与计算 21
3.3本章小结 22
4 机械材料选择和零件的校核 23
4.1机械材料选用原则 23
4.2零件材料选择与强度校核 24
4.3本章小结 27
结 论 28
致 谢 29
参考文献 30
中文摘要 I
英文摘要 II
1 绪 论 1
1.1引言 1
1.2国内外相关领域的研究现状 2
1.2.1国外全方位移动机器人的研究现状 2
1.2.2国内全方位移动机器人的研究现状 4
1.3主要研究内容 5
2 全向移动机器人移动机构设计 6
2.1引言 6
2.2机械设计的基本要求 6
2.3全方位轮式移动机构的研制 7
2.3.1移动机器人车轮旋转机构设计 7
2.3.2移动机器人转向机构设计 9
2.3.3电机的选型与计算 12
2.4移动机器人车体结构设计 15
2.5本章小结 15
3 机械手臂的设计 16
3.1末端执行器的设计 16
3.1.1末端执行器设计要求 16
3.1.2末端执行器的设计 17
3.1.3电机的选型与计算 18
3.2机械手臂杆件的设计 19
3.2.1腕部结构设计 19
3.2.2臂部结构设计 20
3.2.3机械臂电机的选型与计算 21
3.3本章小结 22
4 机械材料选择和零件的校核 23
4.1机械材料选用原则 23
4.2零件材料选择与强度校核 24
4.3本章小结 27
结 论 28
致 谢 29
参考文献 30