设计简介
目录
前 言 2
第一章 绪 论 3
1.1 引言 3
1.2 工业机器人的含义 4
1.3 选题背景与意义 5
1.4 工业机器人的组成 6
1.5 工业机器人的发展及国内外发展趋势 7
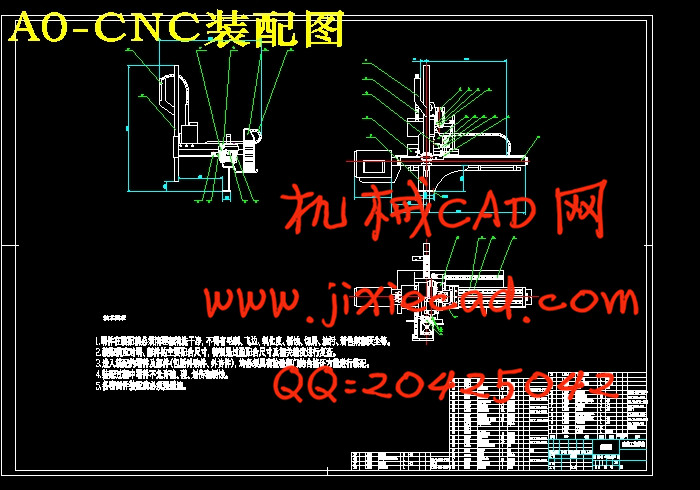
第二章 SC750三轴伺服驱动机器人结构设计方案 12
2.1 机械手的设计方法 12
2.1.1 机械手的选择与分析 12
2.1.2 直角坐标机器人的设计方法 13
2.2 机械手的结构设计 19
2.2.1 机器人的总体设计 19
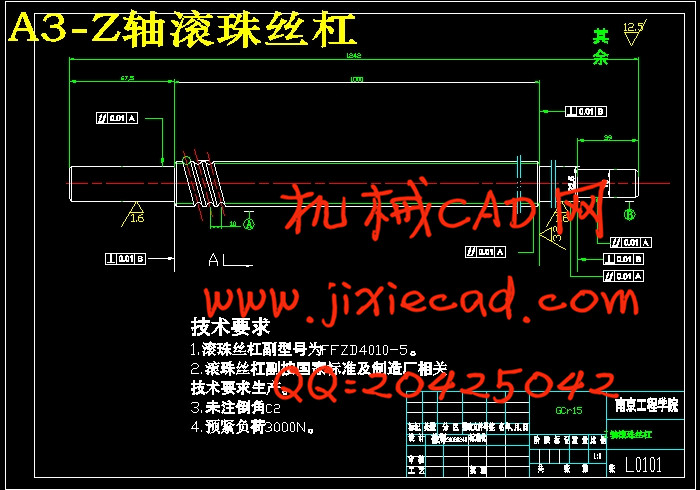
2.2.2 机械手的传动部件设计 20
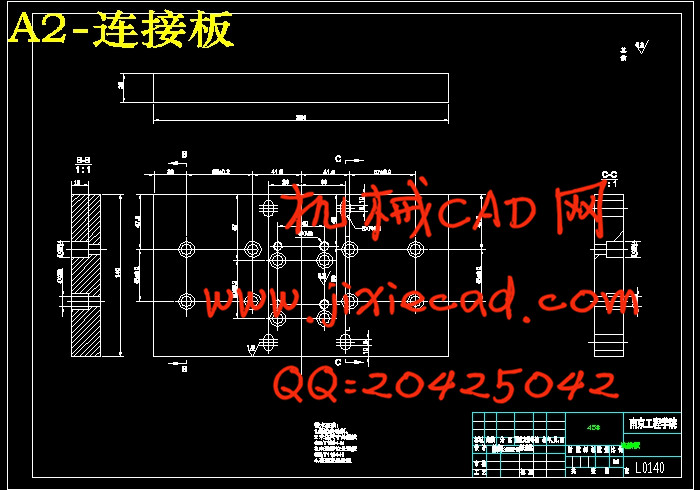
2.2.3 机械手的臂部设计 21
2.3 SC750三轴伺服驱动机器人机构的特点 21
第三章 工业机器人的运动系统分析 22
3.1 工业机器人的运动系统分析 22
3.1.1机器人的运动概述 22
3.1.2 机器人的驱动方式 25
第四章SC750三轴伺服驱动机器人零件的设计 26
4.1 伺服电机的选择 26
4.2 减速机的选择 28
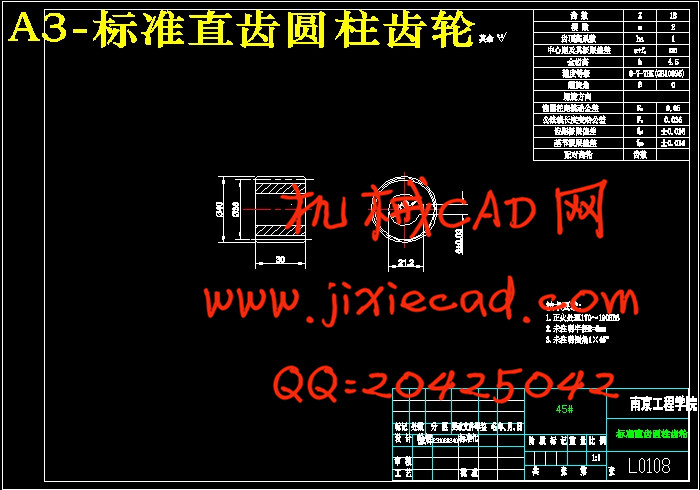
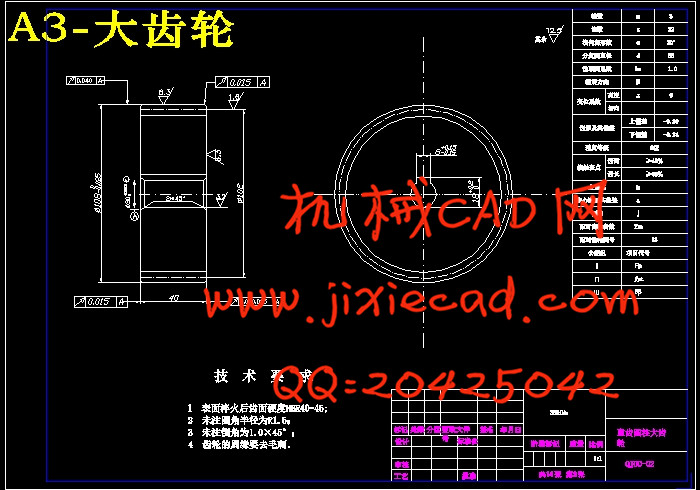
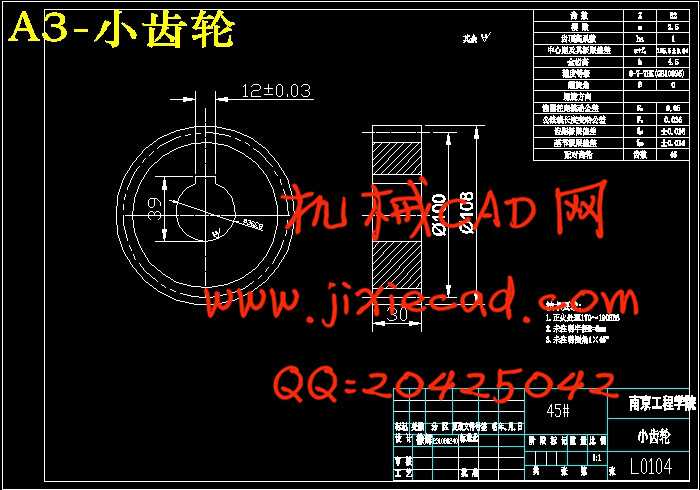
4.3 齿轮齿条的选择 30
4.4 导轨的选择 38
第五章 结论 40
致 谢 41
参 考 文 献 42