设计简介
目 录
第一章 绪论 1
1.1服务机器人概述 1
1.1.1 服务机器人的机械结构问题 1
1.1.2 服务机器人的适应环境 1
1.1.3 服务机器人的技术问题 2
1.1.4 服务机器人的可靠性和安全性 2
1.1.5 服务机器人的应用 3
1.1.6 家用智能清扫机器人 3
1.2 国内外相关产品研究 4
1.2.1 国外产品研究状况 4
1.2.2 国内产品研究状况 7
1.2.3 自助充电技术发展状况 8
1.3研究的目的和意义 9
第二章 家庭清洁机器人的关键技术 9
2.1 传感技术 10
2.2 路径规划技术 10
2.3 吸尘技术 11
2.4 电源技术 11
2.5 环境建模 12
2.6 自主移动技术 12
第三章 清洁机器人的机械设计 13
3.1 机械结构组成和原理 13
3.1.1 模块化设计 13
3.1.2 车体设计 14
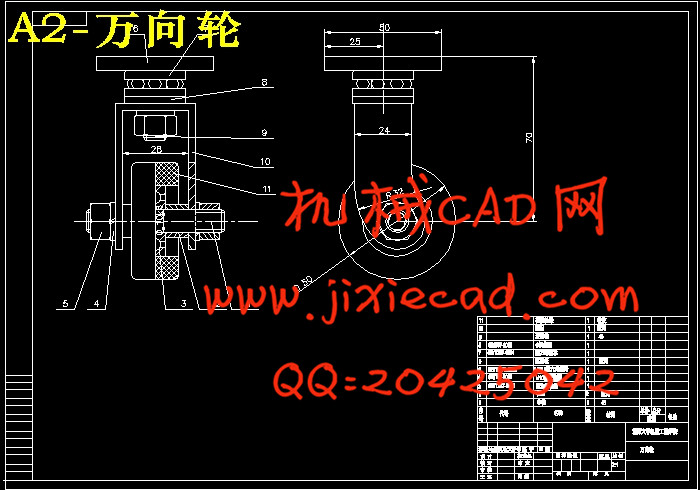
3.1.3 车轮系统 16
3.1.4 工作原理 17
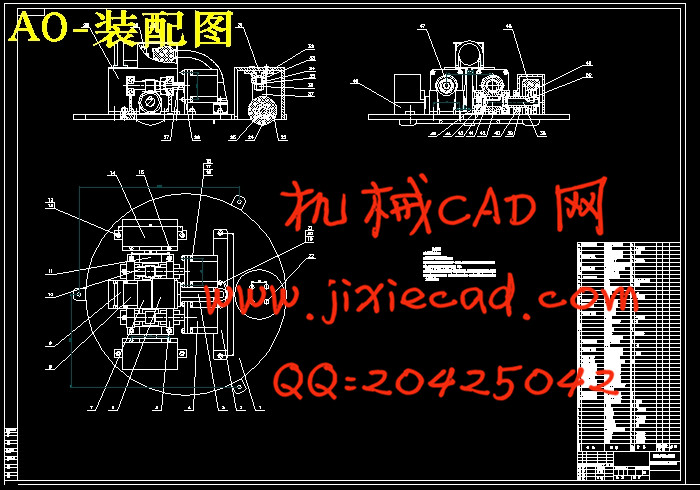
3.2 清洁机器人总体设计 17
3.2.1 机器人外形设计 17
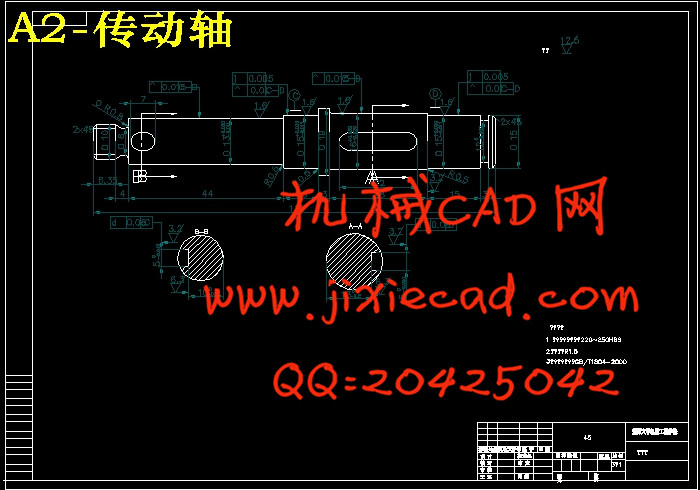
3.2.2机器人的行走机构设计 18
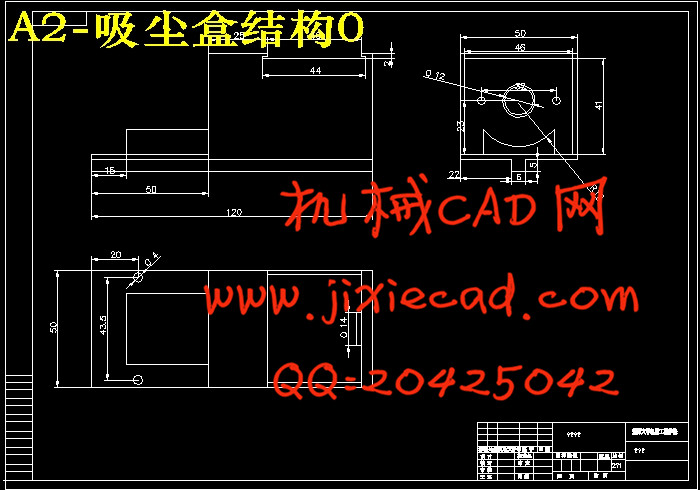
3.2.3 吸尘机构的设计 19
第四章 机械结构的具体计算 19
4.1 驱动电机的选择 19
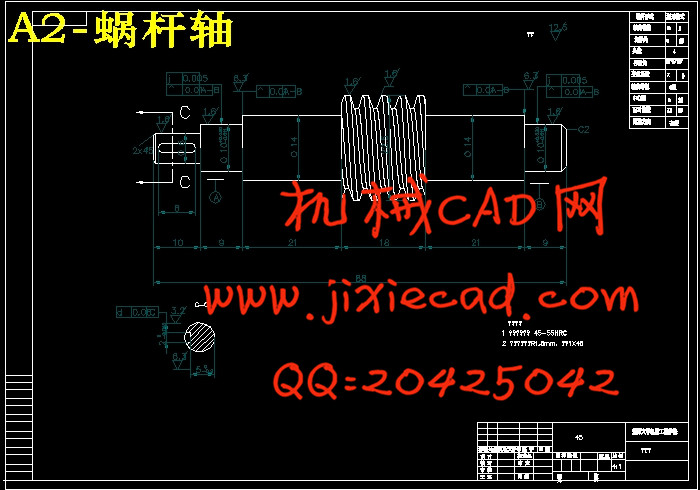
4.2 蜗轮蜗杆的选择 21
4.3 吸尘机构电机的选择 23
4.4 家用清洁机器人电池的选择 23
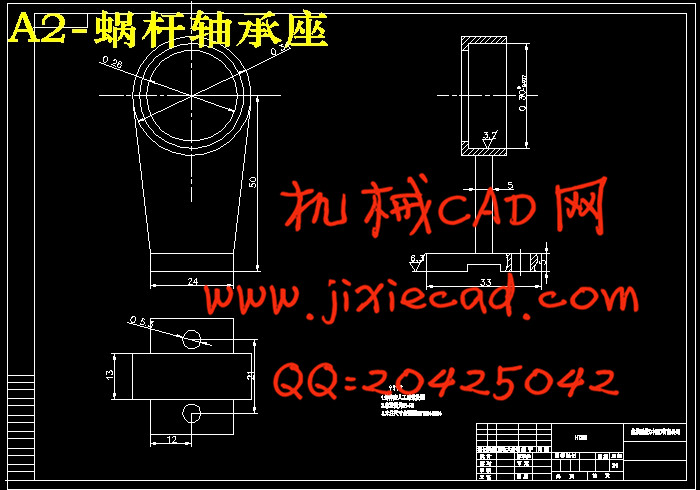
4.5 驱动机构上蜗杆轴承的寿命的计算 23
第五章 总结与展望 26
5.1 发展趋势 26
5.1.1高度智能化 26
5.1.2功能扩展 26
5.1.3低成本化 26
5.2 展望 27
参考文献 28
致谢 29
第一章 绪论 1
1.1服务机器人概述 1
1.1.1 服务机器人的机械结构问题 1
1.1.2 服务机器人的适应环境 1
1.1.3 服务机器人的技术问题 2
1.1.4 服务机器人的可靠性和安全性 2
1.1.5 服务机器人的应用 3
1.1.6 家用智能清扫机器人 3
1.2 国内外相关产品研究 4
1.2.1 国外产品研究状况 4
1.2.2 国内产品研究状况 7
1.2.3 自助充电技术发展状况 8
1.3研究的目的和意义 9
第二章 家庭清洁机器人的关键技术 9
2.1 传感技术 10
2.2 路径规划技术 10
2.3 吸尘技术 11
2.4 电源技术 11
2.5 环境建模 12
2.6 自主移动技术 12
第三章 清洁机器人的机械设计 13
3.1 机械结构组成和原理 13
3.1.1 模块化设计 13
3.1.2 车体设计 14
3.1.3 车轮系统 16
3.1.4 工作原理 17
3.2 清洁机器人总体设计 17
3.2.1 机器人外形设计 17
3.2.2机器人的行走机构设计 18
3.2.3 吸尘机构的设计 19
第四章 机械结构的具体计算 19
4.1 驱动电机的选择 19
4.2 蜗轮蜗杆的选择 21
4.3 吸尘机构电机的选择 23
4.4 家用清洁机器人电池的选择 23
4.5 驱动机构上蜗杆轴承的寿命的计算 23
第五章 总结与展望 26
5.1 发展趋势 26
5.1.1高度智能化 26
5.1.2功能扩展 26
5.1.3低成本化 26
5.2 展望 27
参考文献 28
致谢 29