设计简介
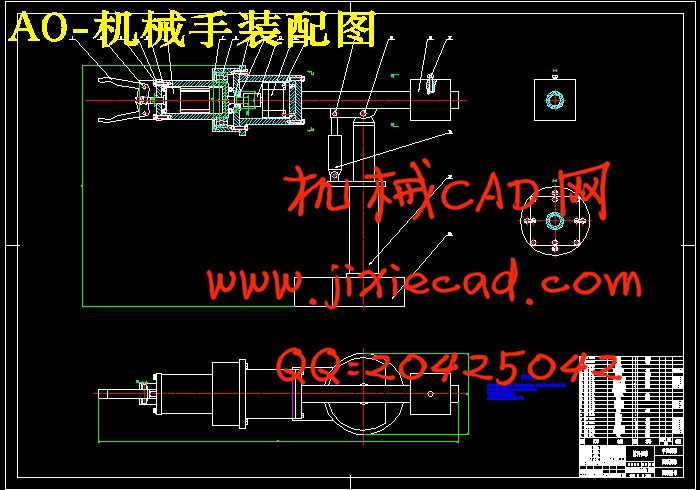
小型夹持式机械手及手臂
摘 要
小型夹持式机械手由于可以代替人手,与外界环境中有毒以及有害的物质直接接触以减少对人的危害,并且具有能不断重复工作和劳动、不知疲劳、不怕危险、抓举重物的力量比人手大等特点而受到越来越广泛的重视。由于本设计要兼顾机械系统和控制系统的要求,因此在机械手液压控制系统的一般原理上进行了新的设计,并对机械手进行了轨迹规划,使它较好的达到了实际的设计要求。鉴于本项目中机械手的机械系统和控制系统的设计与实现工作已经基本完成,本文主要侧重于对液压控制部分的设计工作进行描述。
首先,本文将概述小型夹持式机械手的基本组成和特点,并且阐述了国内外研究状况。
其次,本文将对机械手的总体方案进行设计,并最终确定传动方案。
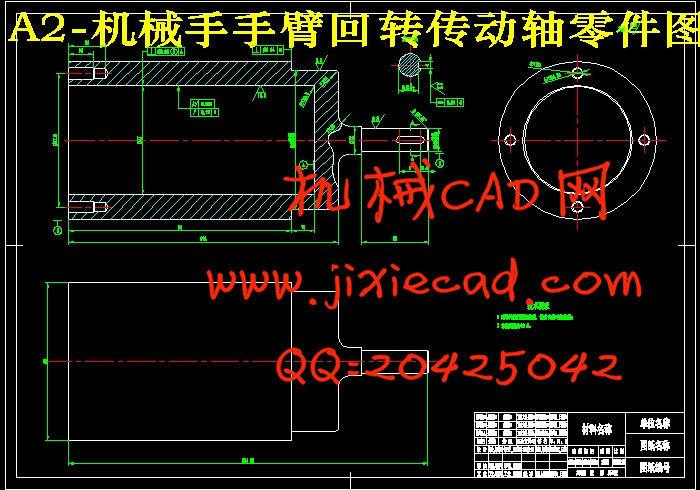
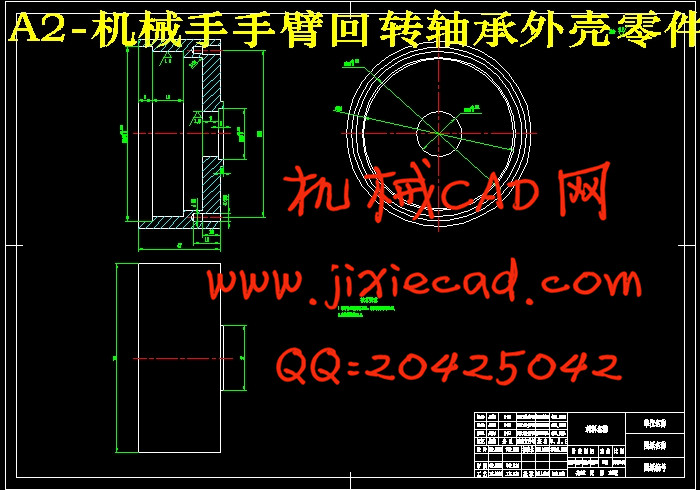
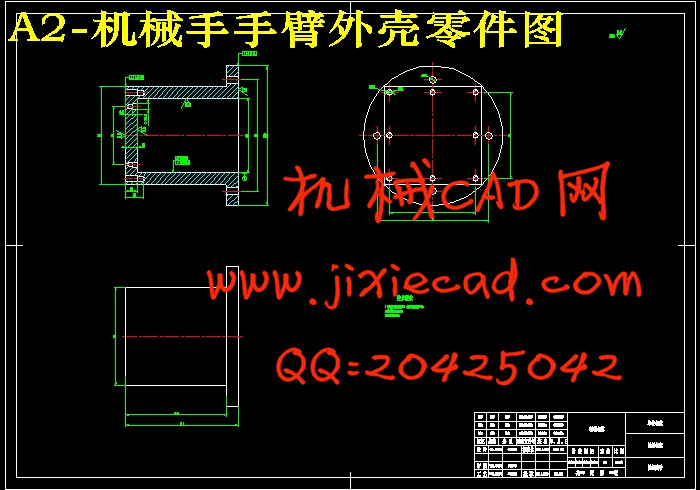
再次,本文将详细阐述机械手的机械系统和液压控制系统的原理和设计过程。并给出示意图和图表加以说明。
最后,本文将对机械系统和控制系统进行有机的结合,并对小型夹持式机械手及手臂进行了简单的轨迹规划。
关键词:夹持式,机械手,轨迹规划
Small-sized and Holding-styled Mechanical Hand Am
Abstract
The small-sized and holding-styled mechanical hand has been emphasized more and more widely because it can take the place of human hands and therefore avoid the direct touch with toxic and harmful materials to lessen the harm to people; also it can work repeatedly without feeling weary and worrying the dangerous condition; at the same time it has more strength than human hands when snatching heavy goods. This design makes some innovations based on the general principle of the hydraulic pressure control system of mechanical hand to meet the need of mechanical system and control system. Also the design makes projects on tracks for mechanical hand to make it meet the practical design needs better. The paper mainly describes how to design the hydraulic pressure control system because the design and realization of mechanical system and control system has been completed basically in the project.
First, we will expound the basic components and features of the small-sized and holding-styled mechanical hand in this paper; then we summarize the research status home and abroad.
Second, we will design the general schemes for the mechanical hand and then select transmission for the final scheme.
Next we will elaborate on the principle and designing process of the mechanical system and hydraulic pressure control system. Also we give sketch maps and charts to explain.
Finally we combine the mechanical system with the hydraulic pressure control system organically and make simple projects on tracks of the small-sized and holding-styled mechanical hand and arm.
ey words: holding-styled, mechanical hand, projects on tracks
目 录
1 绪论......................................................................................................................................1
1.1 课题研究的目的和意思.............................................................................................1
1.2 国内外研究状况.........................................................................................................2
1.3 机械手的特点.............................................................................................................2
1.4 机械手的组成.............................................................................................................3
2 总体方案设计......................................................................................................................4
2.1 机械手动作规划.........................................................................................................4
2.2 传动方案的确定.........................................................................................................4
2.2.1 手部方案的确定............................................................................................5
2.2.2 手臂俯仰方案的确定....................................................................................5
2.2.3 手臂回转方案的确定....................................................................................6
3 机械手结构设计..................................................................................................................7
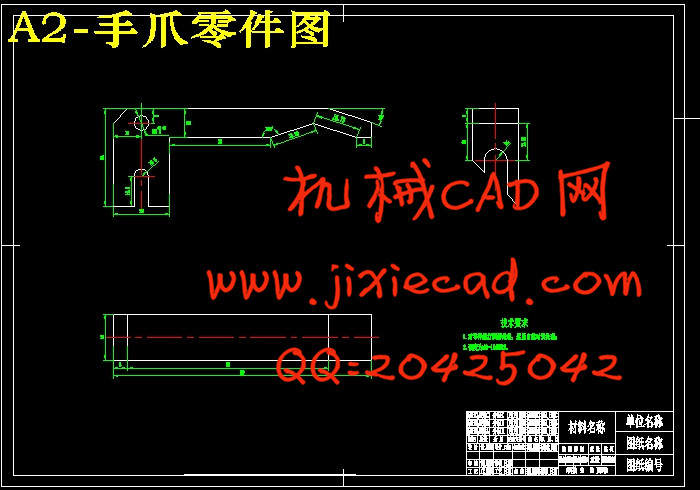
3.1 手部设计.....................................................................................................................7
3.1.1 手指夹紧力的确定........................................................................................7
3.1.2 手部结构设计................................................................................................7
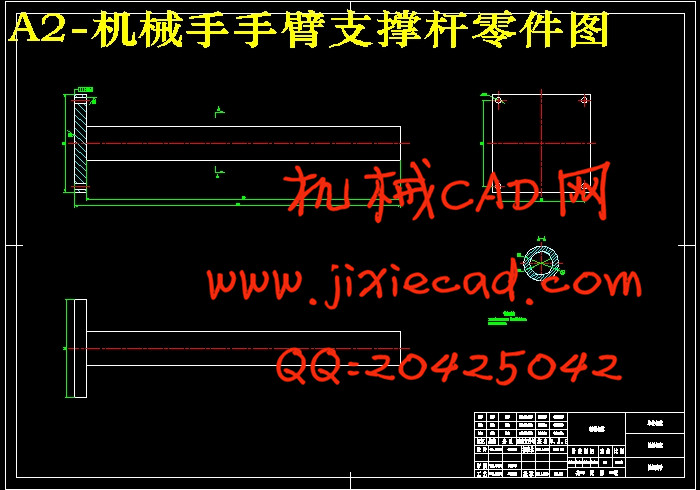
3.2 臂部结构设计............................................................................................................ 9
3.2.1 手臂材料的选择........................................................................................... 9
3.2.2 手臂回转结构设计.......................................................................................10
3.2.3 手臂俯仰结构设计.......................................................................................15
4 机械手液压驱动系统设计.................................................................................................16
4.1 驱动方式的选择........................................................................................................16
4.2 驱动系统的设计计算................................................................................................17
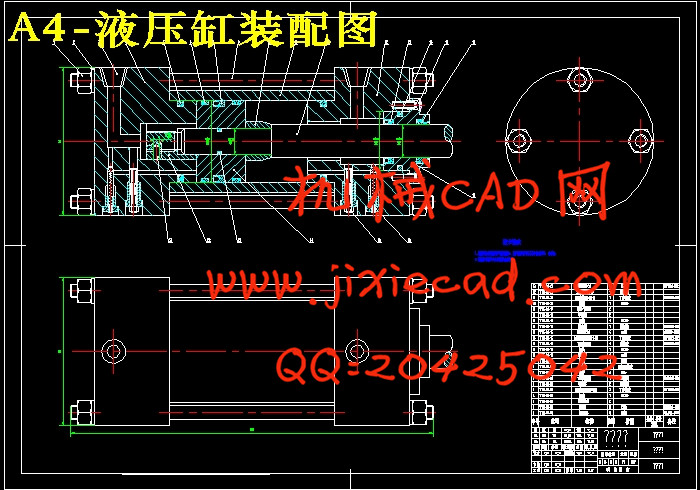
4.2.1 夹紧缸设计...................................................................................................17
4.2.2 手臂俯仰缸设计...........................................................................................22
4.3 液压系统原理图的拟定............................................................................................25
4.3.1 夹紧系统原理图的拟定...............................................................................25
4.3.2 俯仰系统原理图的拟定...............................................................................25
4.3.3 系统合成.......................................................................................................26
4.4 液压泵的计算..........................................................................................................27
5 机械手轨迹规划.................................................................................................................28
结论...........................................................................................................................................30
致谢...........................................................................................................................................31
参考文献...................................................................................................................................32
摘 要
小型夹持式机械手由于可以代替人手,与外界环境中有毒以及有害的物质直接接触以减少对人的危害,并且具有能不断重复工作和劳动、不知疲劳、不怕危险、抓举重物的力量比人手大等特点而受到越来越广泛的重视。由于本设计要兼顾机械系统和控制系统的要求,因此在机械手液压控制系统的一般原理上进行了新的设计,并对机械手进行了轨迹规划,使它较好的达到了实际的设计要求。鉴于本项目中机械手的机械系统和控制系统的设计与实现工作已经基本完成,本文主要侧重于对液压控制部分的设计工作进行描述。
首先,本文将概述小型夹持式机械手的基本组成和特点,并且阐述了国内外研究状况。
其次,本文将对机械手的总体方案进行设计,并最终确定传动方案。
再次,本文将详细阐述机械手的机械系统和液压控制系统的原理和设计过程。并给出示意图和图表加以说明。
最后,本文将对机械系统和控制系统进行有机的结合,并对小型夹持式机械手及手臂进行了简单的轨迹规划。
关键词:夹持式,机械手,轨迹规划
Small-sized and Holding-styled Mechanical Hand Am
Abstract
The small-sized and holding-styled mechanical hand has been emphasized more and more widely because it can take the place of human hands and therefore avoid the direct touch with toxic and harmful materials to lessen the harm to people; also it can work repeatedly without feeling weary and worrying the dangerous condition; at the same time it has more strength than human hands when snatching heavy goods. This design makes some innovations based on the general principle of the hydraulic pressure control system of mechanical hand to meet the need of mechanical system and control system. Also the design makes projects on tracks for mechanical hand to make it meet the practical design needs better. The paper mainly describes how to design the hydraulic pressure control system because the design and realization of mechanical system and control system has been completed basically in the project.
First, we will expound the basic components and features of the small-sized and holding-styled mechanical hand in this paper; then we summarize the research status home and abroad.
Second, we will design the general schemes for the mechanical hand and then select transmission for the final scheme.
Next we will elaborate on the principle and designing process of the mechanical system and hydraulic pressure control system. Also we give sketch maps and charts to explain.
Finally we combine the mechanical system with the hydraulic pressure control system organically and make simple projects on tracks of the small-sized and holding-styled mechanical hand and arm.
ey words: holding-styled, mechanical hand, projects on tracks
目 录
1 绪论......................................................................................................................................1
1.1 课题研究的目的和意思.............................................................................................1
1.2 国内外研究状况.........................................................................................................2
1.3 机械手的特点.............................................................................................................2
1.4 机械手的组成.............................................................................................................3
2 总体方案设计......................................................................................................................4
2.1 机械手动作规划.........................................................................................................4
2.2 传动方案的确定.........................................................................................................4
2.2.1 手部方案的确定............................................................................................5
2.2.2 手臂俯仰方案的确定....................................................................................5
2.2.3 手臂回转方案的确定....................................................................................6
3 机械手结构设计..................................................................................................................7
3.1 手部设计.....................................................................................................................7
3.1.1 手指夹紧力的确定........................................................................................7
3.1.2 手部结构设计................................................................................................7
3.2 臂部结构设计............................................................................................................ 9
3.2.1 手臂材料的选择........................................................................................... 9
3.2.2 手臂回转结构设计.......................................................................................10
3.2.3 手臂俯仰结构设计.......................................................................................15
4 机械手液压驱动系统设计.................................................................................................16
4.1 驱动方式的选择........................................................................................................16
4.2 驱动系统的设计计算................................................................................................17
4.2.1 夹紧缸设计...................................................................................................17
4.2.2 手臂俯仰缸设计...........................................................................................22
4.3 液压系统原理图的拟定............................................................................................25
4.3.1 夹紧系统原理图的拟定...............................................................................25
4.3.2 俯仰系统原理图的拟定...............................................................................25
4.3.3 系统合成.......................................................................................................26
4.4 液压泵的计算..........................................................................................................27
5 机械手轨迹规划.................................................................................................................28
结论...........................................................................................................................................30
致谢...........................................................................................................................................31
参考文献...................................................................................................................................32