设计简介
摘要
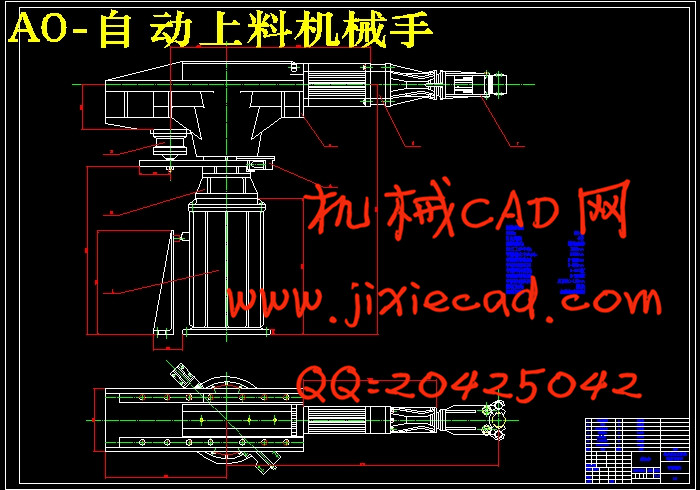
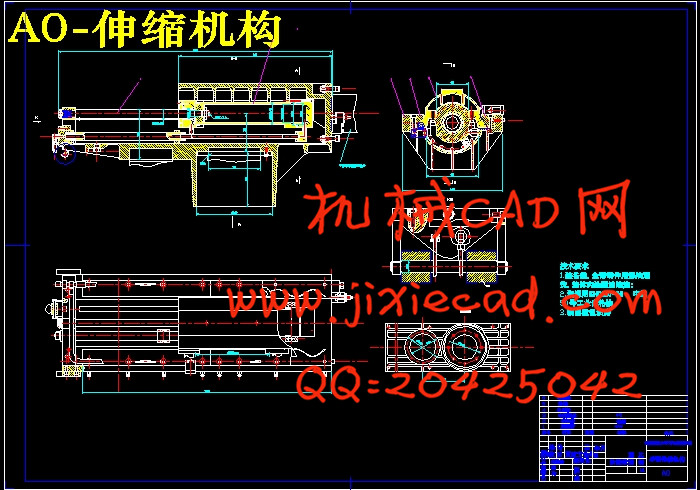
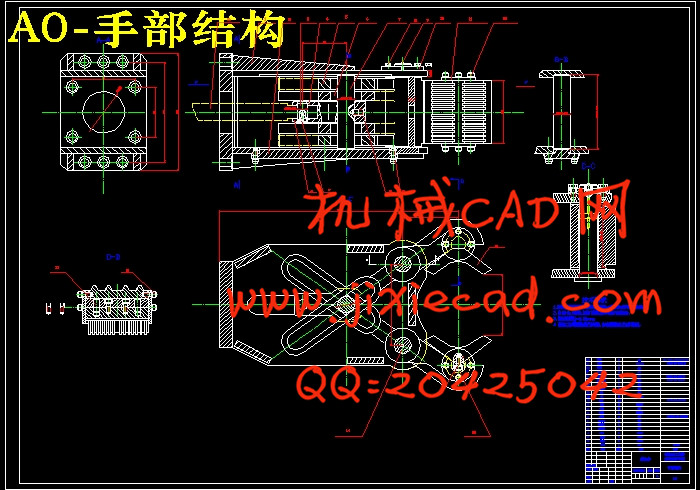
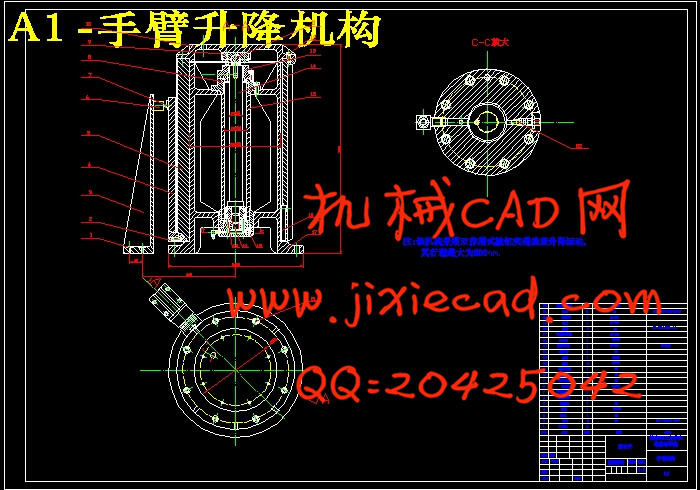
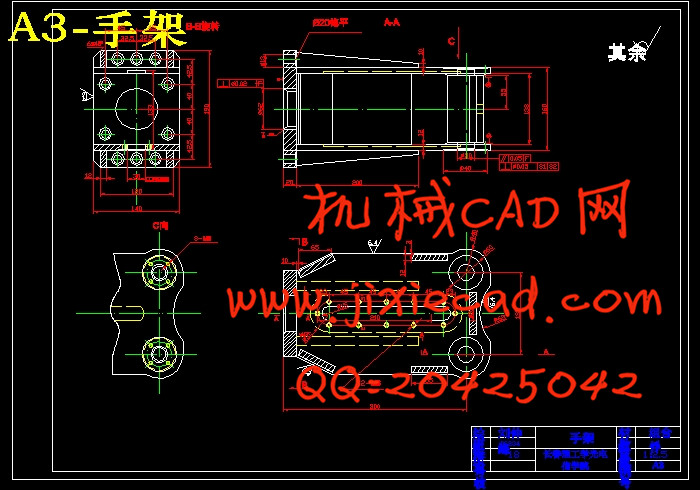
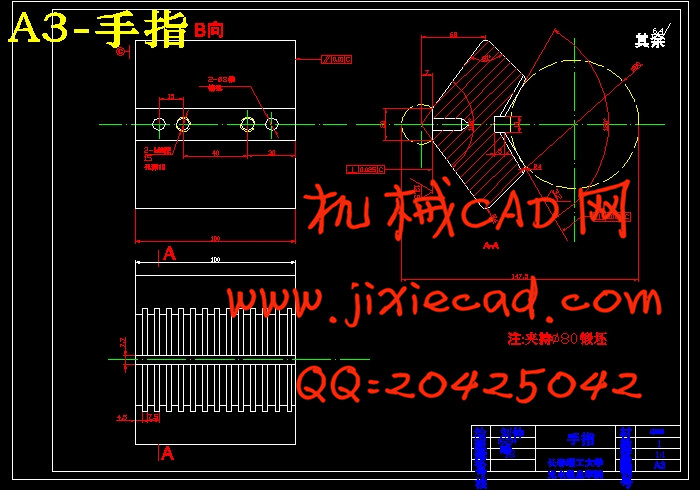
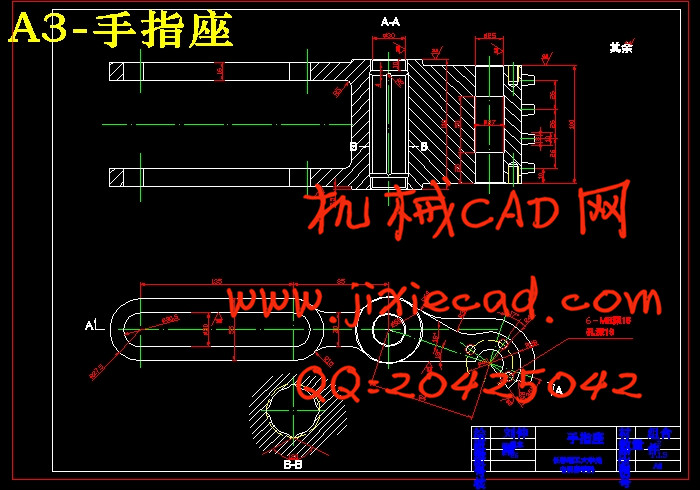
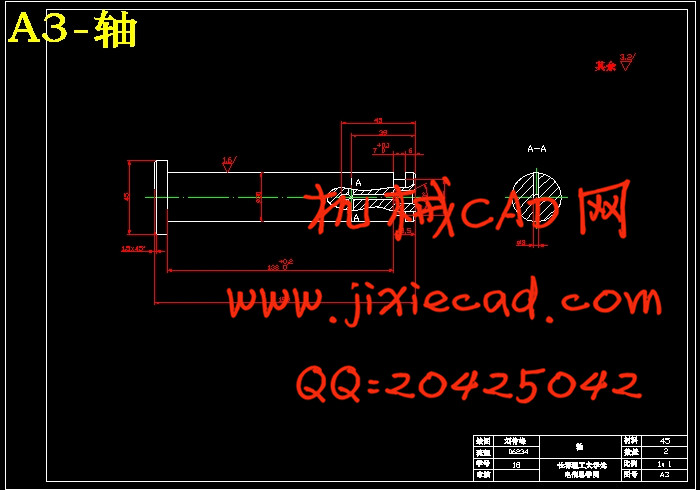
锻压机自动上料机械手的作用是将被加热的坯料从上料位置将热坯料搬运到立式精锻机上锻打,其成品锻件由下料机械手从立式精锻机上取下并送到转换机械手上,转换机械手先把锻件反转 90度成水平位置,由丙烷切割装置将两端切齐,切割完毕运送到车间外面的仓库。该机械手包括执行系统、驱动系统和控制系统,本文主要设计了机械手的执行系统即手部.腕部和臂部的设计,实现了手部的夹持、腕部的回转和臂部的伸缩等功能,用 CAD完成了该机械手的总装图及手部和臂部的绘制,并分析操作该机械手的各种力学参数 ,讨论了其工作空间的情况。同时对其进行动力学分析,得到各传动关节所需的驱动力,得出了最终方案。
关键词: 锻压机 执行系统 力学参数
Abstract
The forge press automatic high-quality goods manipulator's function is the semifinished materials which heats up from the high-quality goods position the hot semifinished materials is transported to the vertical fine forging machine on hammers, its end product forging takes down by the yummy treats manipulator from the vertical fine forging machine and delivers transforms on the manipulator, transforms the manipulator to reverse the forging 90 degrees to become the first horizontal position, cuts neat by the propane cutter device the both sides, cutting finished ships to the workshop outside the warehouse. Manipulator including the implementation of the system, drive system and control system, this paper designed a robot hand that the implementation of the system. Wrist and arm of the design, implementation of the hand's grip, wrist rotation and arm stretching functions use CAD to complete assembly of the mechanical hand and hand and arm map rendering, and analysis to operate the various mechanical parameters of the manipulator, discussed the situation of their work space. At the same time the dynamic of its analysis, the driving force needed to drive joint, come to the final program.
Keyword: forging machine the implementation of the system the mechanical parameters
锻压机自动上料机械手的作用是将被加热的坯料从上料位置将热坯料搬运到立式精锻机上锻打,其成品锻件由下料机械手从立式精锻机上取下并送到转换机械手上,转换机械手先把锻件反转 90度成水平位置,由丙烷切割装置将两端切齐,切割完毕运送到车间外面的仓库。该机械手包括执行系统、驱动系统和控制系统,本文主要设计了机械手的执行系统即手部.腕部和臂部的设计,实现了手部的夹持、腕部的回转和臂部的伸缩等功能,用 CAD完成了该机械手的总装图及手部和臂部的绘制,并分析操作该机械手的各种力学参数 ,讨论了其工作空间的情况。同时对其进行动力学分析,得到各传动关节所需的驱动力,得出了最终方案。
关键词: 锻压机 执行系统 力学参数
Abstract
The forge press automatic high-quality goods manipulator's function is the semifinished materials which heats up from the high-quality goods position the hot semifinished materials is transported to the vertical fine forging machine on hammers, its end product forging takes down by the yummy treats manipulator from the vertical fine forging machine and delivers transforms on the manipulator, transforms the manipulator to reverse the forging 90 degrees to become the first horizontal position, cuts neat by the propane cutter device the both sides, cutting finished ships to the workshop outside the warehouse. Manipulator including the implementation of the system, drive system and control system, this paper designed a robot hand that the implementation of the system. Wrist and arm of the design, implementation of the hand's grip, wrist rotation and arm stretching functions use CAD to complete assembly of the mechanical hand and hand and arm map rendering, and analysis to operate the various mechanical parameters of the manipulator, discussed the situation of their work space. At the same time the dynamic of its analysis, the driving force needed to drive joint, come to the final program.
Keyword: forging machine the implementation of the system the mechanical parameters
目录
第一章 绪论1
1.1 机械手发展状况 1
1.1.1 发展历史 1
1.1.2现代研究趋势 2
1. 1. 3 国内发展状况 3
1.1.4应用举例 4
1. 2机械手的研究意义 6
1.3应用价值 7
第二章 功能原理和结构评价设计8
2.1参考数据 8
2.2 工作要求 9
2.3系统组成 9
2.4总体方案 10
2.5具体结构方案 11
第三章机械手执行系统设计与计算13
3.1机械手执行系统设的各部分设计结构 13
3.1.1手部结构 13
3. 1.2腕部结构 14
3.1.3臂部结构 14
3.2.机械手手部设计: 15
3.2.1手部结构: 15
3.2.2夹紧力计算: 15
3.2.3 手臂的设计计算 16
3.3液压缸结构尺寸液压缸内径计算: 17
3.4.液压缸壁厚计算 18
3.5.液压缸零件的连接计算 20
总结22
致谢23
参考文献24