设计简介
仿生六足机器人机构的设计
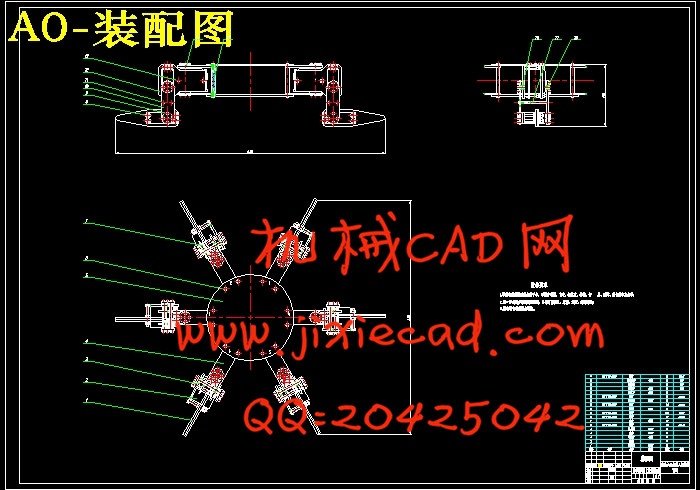
摘 要:简述了课题的背景及目的,对仿生学机器人做了简单介绍。本文通过对仿生六足机器人的步态规划的研究,确定了六足机器人的足的结构,采用 3 自由度分析了步态稳定性,实现六足机器人直线行走和转弯行走。总体设计包含了六足机器人的装配图和零件图的绘制,并对相关零件做了校验,确保机构设计的可行性。
关键词:仿生学;六足机器人;机构
Abstract: The paper has summarized the background and the goal of its topic and has made the simple introduction of the bionic hexapod robot. Through the research of the motion of the six feet of the robot, This design has determined the foot structure,using the analysis of 3 degrees of freedom realizes the forward motion and turning motion of the robot . Picturing of the component and assembly mapping of the bionic hexapod robot as well as the inspection of related parts which ensures the feasibility of the machinery design are both included in the total design.
Key words: bionics ;hexapod robot ;machinery
目 录
摘要……………………………………………………………………………………1
关键词…………………………………………………………………………………1
1 前言 ………………………………………………………………………………1
1.1 课题背景及目的 …………………………………………………………1
1.2 仿生机器人研究现状及发展趋势 ………………………………………2
1.3 仿生学原理分析 …………………………………………………………4
1.4 仿生六足机器人的研究方法与思路 ……………………………………4
2 整体设计方案 ……………………………………………………………………5
2.1 工作原理分析 ……………………………………………………………5
2.1.1 三角步态原理分析 ………………………………………………6
2.1.2 机器人走动步态分析 ……………………………………………6
2.2 机器人机构的整体设计 …………………………………………………7
2.3 电机的选择 ………………………………………………………………9
2.4 舵机驱动原理与控制方法………………………………………………12
2.4.1 舵机原理 …………………………………………………………12
2.4.2 舵机控制方法 ……………………………………………………12
3 零件的设计………………………………………………………………………13
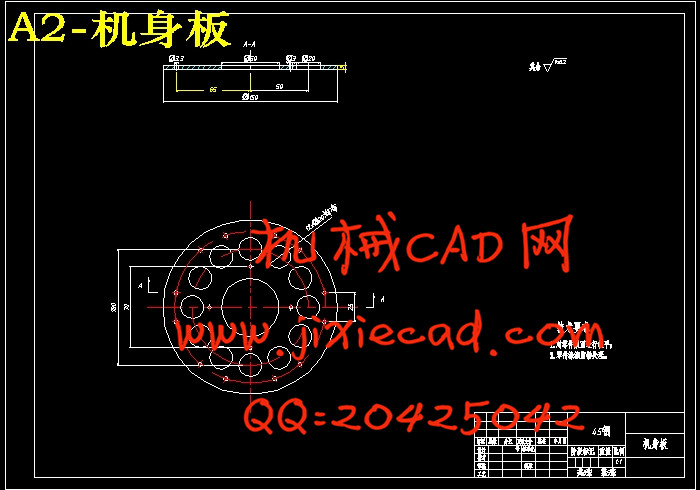
3.1 躯干的设计………………………………………………………………13
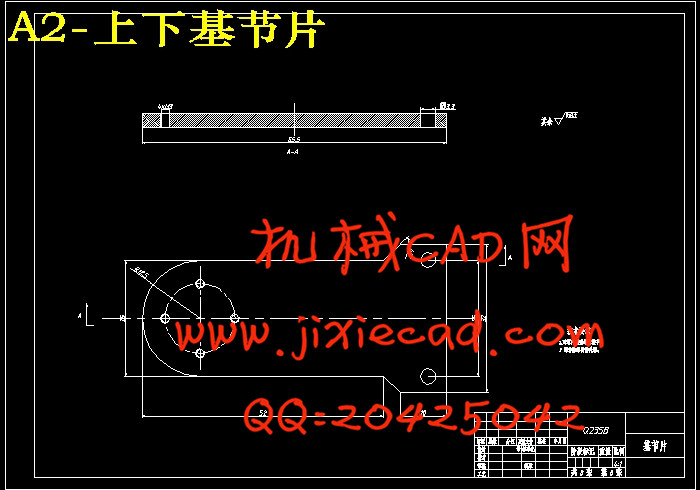
3.2 基节的设计………………………………………………………………14
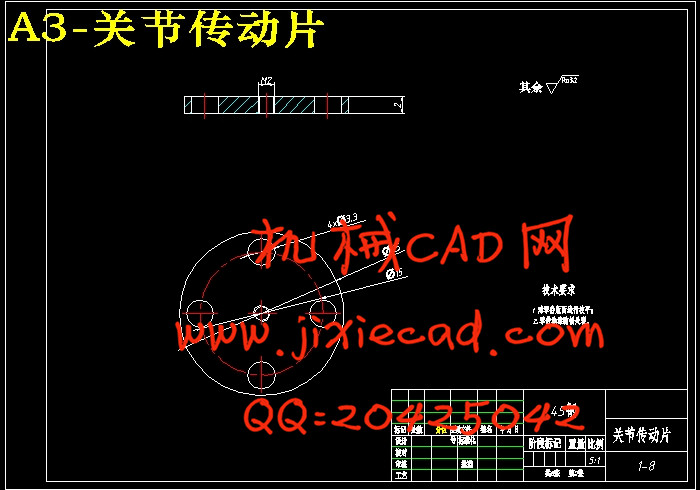
3.3 关节盖的设计……………………………………………………………15
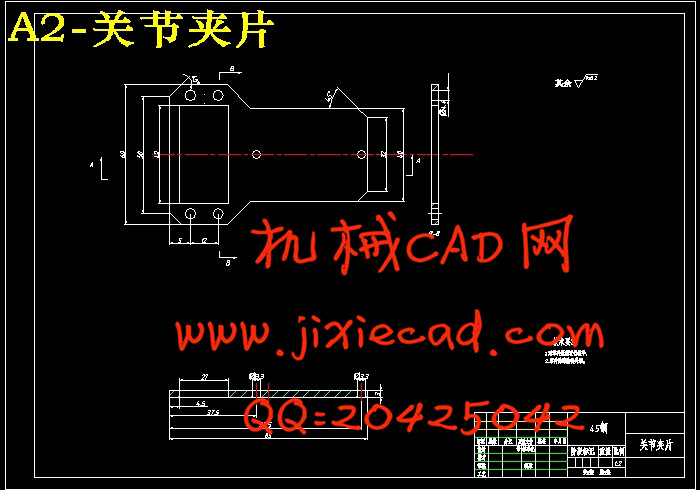
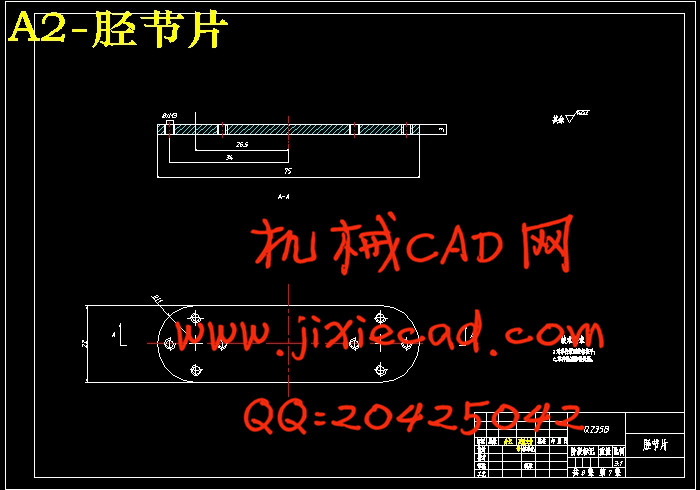
3.4 胫节片的设计……………………………………………………………16
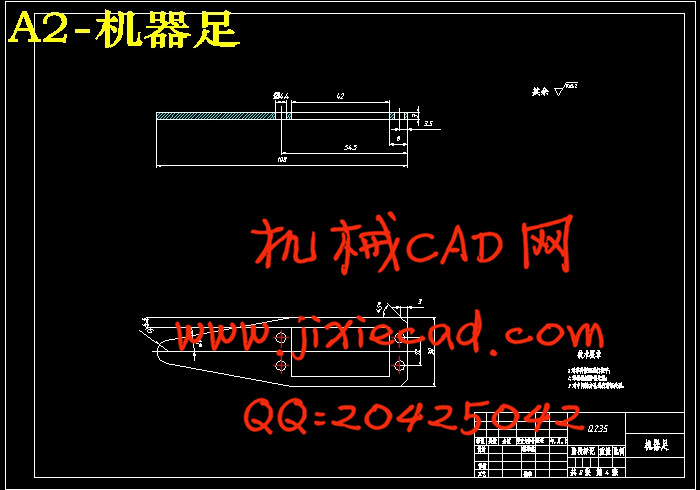
3.5 足的设计…………………………………………………………………17
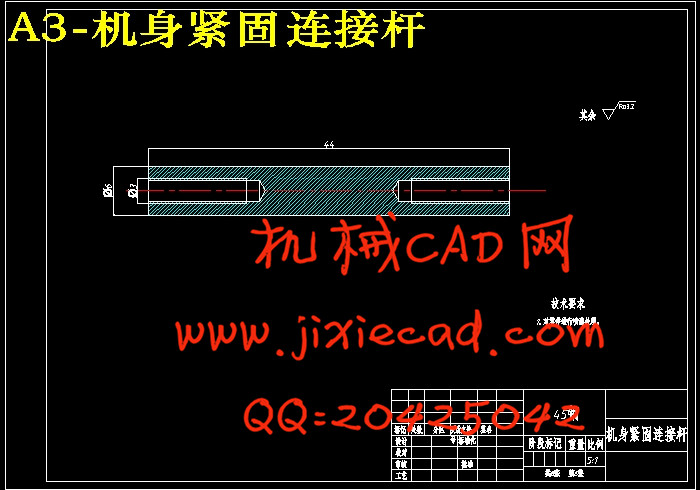
3.6 连接杆的设计……………………………………………………………17
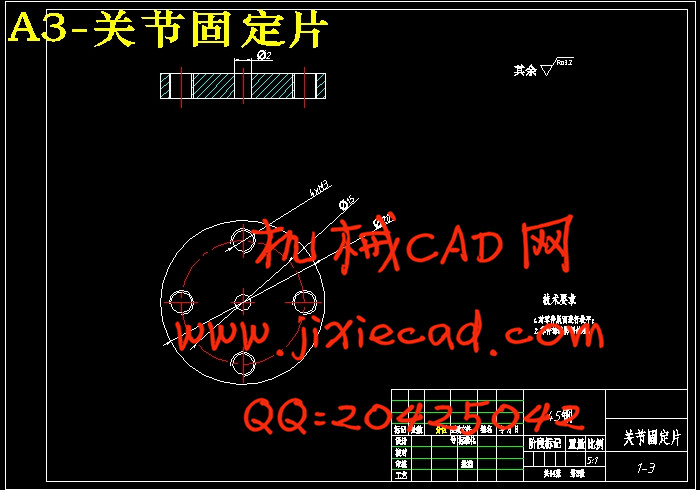
3.7 固定片的设计……………………………………………………………18
4 总结………………………………………………………………………………19
参考文献 ……………………………………………………………………………19
致谢 …………………………………………………………………………………20
摘 要:简述了课题的背景及目的,对仿生学机器人做了简单介绍。本文通过对仿生六足机器人的步态规划的研究,确定了六足机器人的足的结构,采用 3 自由度分析了步态稳定性,实现六足机器人直线行走和转弯行走。总体设计包含了六足机器人的装配图和零件图的绘制,并对相关零件做了校验,确保机构设计的可行性。
关键词:仿生学;六足机器人;机构
Abstract: The paper has summarized the background and the goal of its topic and has made the simple introduction of the bionic hexapod robot. Through the research of the motion of the six feet of the robot, This design has determined the foot structure,using the analysis of 3 degrees of freedom realizes the forward motion and turning motion of the robot . Picturing of the component and assembly mapping of the bionic hexapod robot as well as the inspection of related parts which ensures the feasibility of the machinery design are both included in the total design.
Key words: bionics ;hexapod robot ;machinery
目 录
摘要……………………………………………………………………………………1
关键词…………………………………………………………………………………1
1 前言 ………………………………………………………………………………1
1.1 课题背景及目的 …………………………………………………………1
1.2 仿生机器人研究现状及发展趋势 ………………………………………2
1.3 仿生学原理分析 …………………………………………………………4
1.4 仿生六足机器人的研究方法与思路 ……………………………………4
2 整体设计方案 ……………………………………………………………………5
2.1 工作原理分析 ……………………………………………………………5
2.1.1 三角步态原理分析 ………………………………………………6
2.1.2 机器人走动步态分析 ……………………………………………6
2.2 机器人机构的整体设计 …………………………………………………7
2.3 电机的选择 ………………………………………………………………9
2.4 舵机驱动原理与控制方法………………………………………………12
2.4.1 舵机原理 …………………………………………………………12
2.4.2 舵机控制方法 ……………………………………………………12
3 零件的设计………………………………………………………………………13
3.1 躯干的设计………………………………………………………………13
3.2 基节的设计………………………………………………………………14
3.3 关节盖的设计……………………………………………………………15
3.4 胫节片的设计……………………………………………………………16
3.5 足的设计…………………………………………………………………17
3.6 连接杆的设计……………………………………………………………17
3.7 固定片的设计……………………………………………………………18
4 总结………………………………………………………………………………19
参考文献 ……………………………………………………………………………19
致谢 …………………………………………………………………………………20