设计简介
摘 要
本课题研究的是用于数控车床轴类零件加工自动送料机械手的设计。机械手是工业生产自动化的必然产物,它是一种模仿人体上肢的部分功能,按照事前设定的要求运送工件或夹持工件进行操作的自动化技术设备,对实现工业生产自动化和推动工业生产的进一步发展起着至关重要的作用。机械手能代替人类完成危险、重复枯燥的工作,减轻人类劳动强度,提高劳动生产力。机械手越来越广泛的得到了应用,在机械行业中它可用于零部件组装 ,加工工件的搬运、装卸,特别是在自动化数控机床、组合机床上使用更普遍。
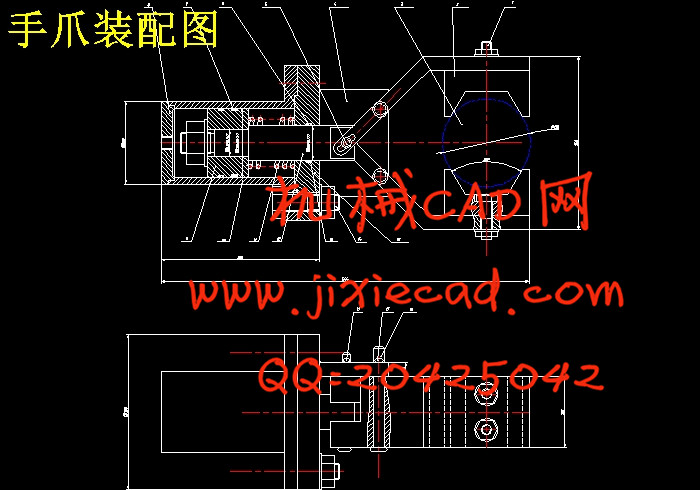
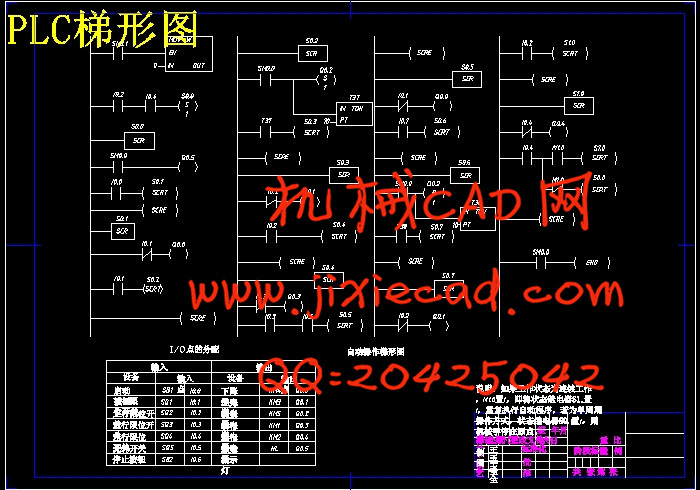
本课题主要涉及机械手夹持机构的设计及计算、液压控制系统的设计、PLC选型及其控制系统的设计,并通过Auto-CAD 技术对机械手的的夹持机构进行装配图和液压传动系统图及其PLC控制系统梯形图的绘制,使其达到自动送料的功能。
关键词:机械手;Auto-CAD;PLC
ABSTRACT
本课题研究的是用于数控车床轴类零件加工自动送料机械手的设计。机械手是工业生产自动化的必然产物,它是一种模仿人体上肢的部分功能,按照事前设定的要求运送工件或夹持工件进行操作的自动化技术设备,对实现工业生产自动化和推动工业生产的进一步发展起着至关重要的作用。机械手能代替人类完成危险、重复枯燥的工作,减轻人类劳动强度,提高劳动生产力。机械手越来越广泛的得到了应用,在机械行业中它可用于零部件组装 ,加工工件的搬运、装卸,特别是在自动化数控机床、组合机床上使用更普遍。
本课题主要涉及机械手夹持机构的设计及计算、液压控制系统的设计、PLC选型及其控制系统的设计,并通过Auto-CAD 技术对机械手的的夹持机构进行装配图和液压传动系统图及其PLC控制系统梯形图的绘制,使其达到自动送料的功能。
关键词:机械手;Auto-CAD;PLC
ABSTRACT
This research project is designed for CNC lathe machining shaft parts automatic feeding robot. Robot is the inevitable product of the industrial production automation, which is a part of imitating human upper limb function, automation technology and equipment in accordance with the requirements set in advance the delivery of the work-piece or work-piece clamping operation, the realization of industrial automation and promote the further development of industrial production plays a crucial role. Robot can replace humans complete dangerous, repeated boring work, reduce human labor intensity and improve labor productivity. Robot has been applied more widely in the machinery industry, it can be used for assembling parts, work-piece handling, loading and unloading, the use of more common, especially in the automation of CNC machine tools, combined machine tools.
This topic mainly involved in the design and calculation, the hydraulic control system design, selection and design of PLC control system of the robot holding means, and through Auto-CAD technology for robot assembly drawing and clamping mechanism and hydraulic drive system diagram PLC control system ladder draw to reach the automatic feeding function.
Keywords:Manipulator;Auto-CAD;PLC
目 录
第一章 绪 论 - 1 -This topic mainly involved in the design and calculation, the hydraulic control system design, selection and design of PLC control system of the robot holding means, and through Auto-CAD technology for robot assembly drawing and clamping mechanism and hydraulic drive system diagram PLC control system ladder draw to reach the automatic feeding function.
Keywords:Manipulator;Auto-CAD;PLC
目 录
1.1 课题研究背景及意义 - 1 -
1.2 机械手的研制动向 - 2 -
1.3 机械手新的应用领域 - 2 -
1.4 设计目的及原则 - 2 -
第二章 设计简介及传动系统图 - 4 -
2.1 机械手简介 - 4 -
2.2 机器人的结构类型 - 4 -
2.3 机械手的设计方案 - 4 -
2.4 设计的主要内容 - 6 -
第三章 机械手夹持机构的设计与计算 - 7 -
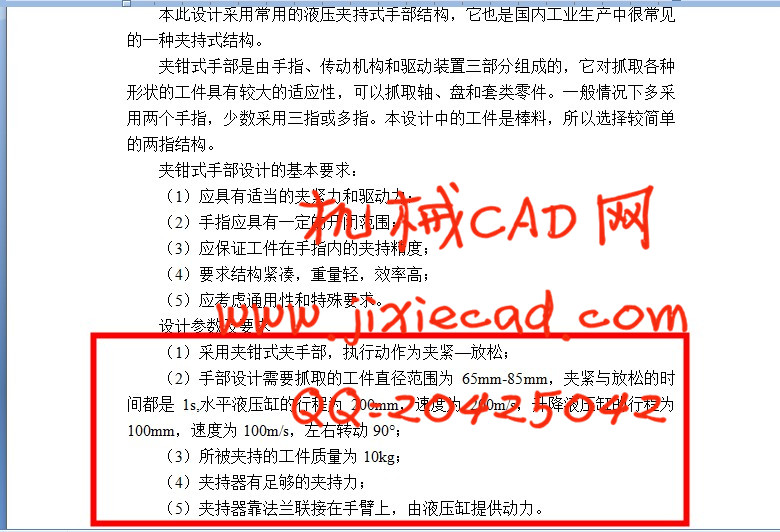
3.1 夹持机构的设计 - 7 -
3.2 确定手部结构 - 7 -
3.3 手部受力分析 - 8 -
3.4 手部夹紧力的计算 - 9 -
3.5 手抓夹持误差分析与计算 - 10 -
3.6 夹紧缸的设计与计算 - 11 -
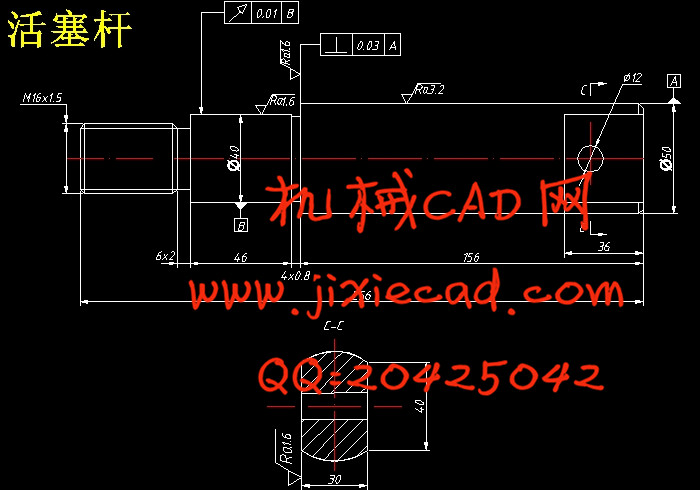
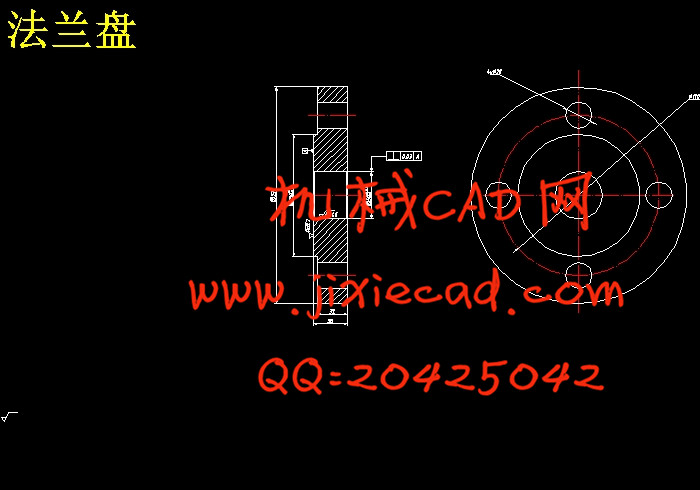
3.7 活塞与活塞杆的设计计算 - 14 -
第四章 机械手液压控制系统的设计 - 17 -
4.1 确定液压系统基本方案 - 17 -
4.2 拟定液压执行元件运动控制回路 - 18 -
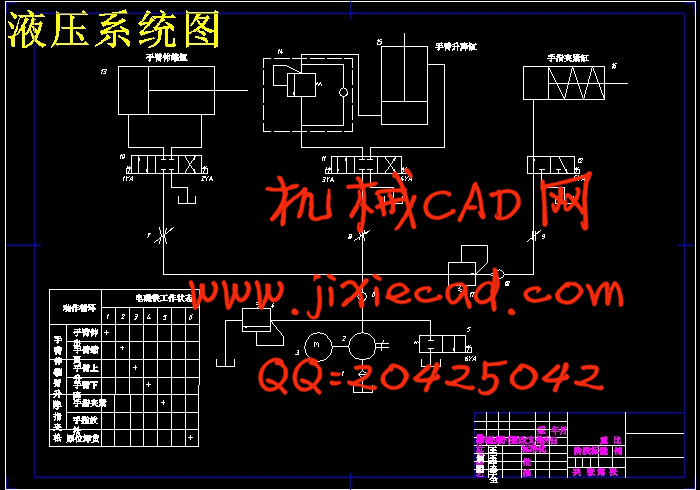
4.3 拟定液压系统图 - 19 -
4.4 确定液压系统的主要参数 - 20 -
4.4.1 水平伸缩液压缸强度的校核 - 20 -
4.4.2 垂直升降液压缸强度的校核 - 22 -
4.5 计算和选择液压元件 - 24 -
4.5.1 液压泵和电机的选择 - 24 -
4.5.2 选择液压控制阀和辅助元件 - 26 -
4.6 根据动作要求编制电磁铁动作表 - 26 -
第五章 PLC控制系统的设计 - 28 -
5.1 控制系统硬件设计 - 28 -
5.1.1 机械手的工艺过程和要求 - 28 -
5.1.2 机械手的作用流程 - 28 -
5.1.3 机械手操作面板的布置 - 29 -
5.1.4 PLC控制器的选型 - 30 -
5.1.5 PLC输入输出地址分配 - 31 -
5.2 机械手控制系统软件系统的设计 - 31 -
5.2.1 机械手控制系统主程序流程图 - 31 -
5.2.2 机械手整体程序结构 - 31 -
5.2.2 机械手单操作工作的程序 - 31 -
5.2.3 自动操作程序 - 32 -
5.2.4 自动操作程序指令语句 - 35 -
第六章 设计总结 - 38 -
参考文献 - 39 -
致 谢 - 40 -