设计简介
摘要 就因为有了这些所需要克服的困难,我们所构想的通讯排障机器人从此就产生了。它能给灾区提供信号,保证通话和数据信息的传输,它还具有太阳能发电功能,能给灾区在夜间进行照明,并且提供电力,而我设计的通讯排障机器人扩展模块,对通讯排障机器人进行了改良,它可以进行远距离空投,还具有小型生命探测机器人,还能进行地面的勘察。
关键词 灾难 救援 通讯 电力供应 机器人
目 录
1引言…………………………………………………………………………………1
1.1 慧鱼组合模型简介…………………………………………………………………2
2救援机器人项目的研究意义………………………………………………………… 3
2.1 城市地震救援面临的困难……………………………………………………… 4
2.2 救援队面临的困难……………………………………………………………… 5
2.3 机器人在救灾方面的优势……………………………………………………… 5
3救灾机器人的研究现状……………………………………………………………… 6
4国内外的救援机器人的研究现状…………………………………………………… 7
4.1 日本……………………………………………………………………………… 7
4.2 美国……………………………………………………………………………… 8
4.3 中国……………………………………………………………………………… 9
5机器人发展现状和趋势………………………………………………………………11
6通讯排障机器人设计思路……………………………………………………………11
6.1通讯方面……………………………………………………………………………12
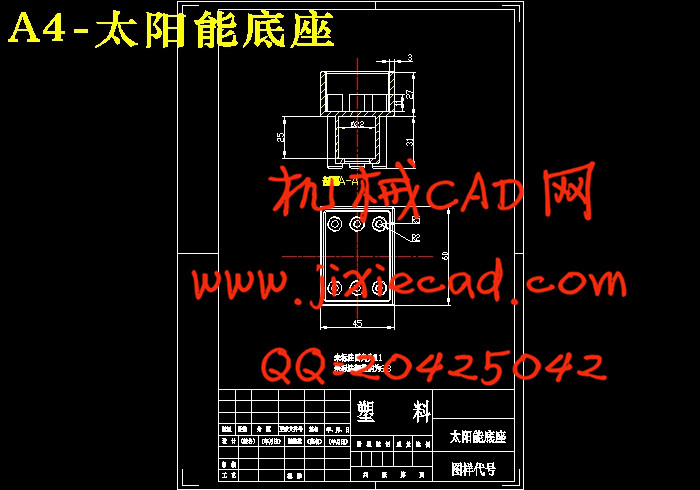
6.2电力方面……………………………………………………………………………13
6.3地面废墟方面………………………………………………………………………13
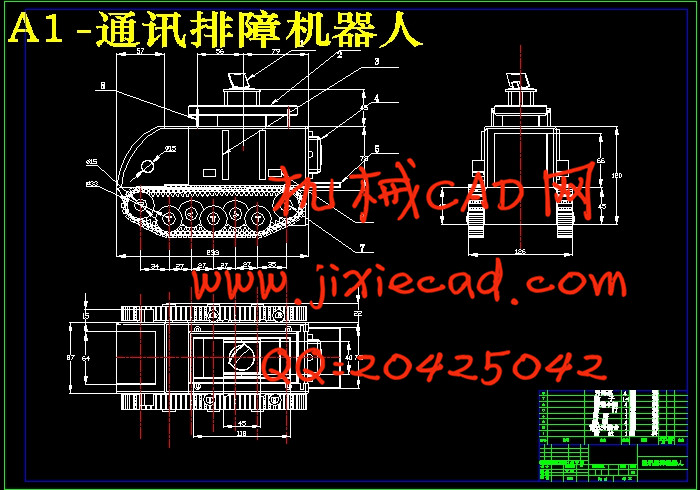
6.4通讯排障机器人的设计……………………………………………………………14
7通讯排障机器人的扩展………………………………………………………………18
7.1思路介绍……………………………………………………………………………19
8通讯排障机器人个部位介绍及其运动分析…………………………………………20
8.1履带…………………………………………………………………………………20
8.1.1履带稳定性分析…………………………………………………………………21
8.2后背储存箱…………………………………………………………………………23
8.3空降设备……………………………………………………………………………24
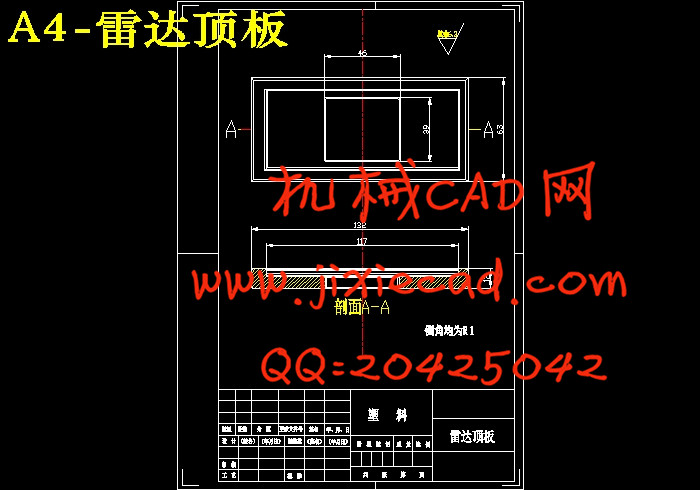
8.4雷达装置……………………………………………………………………………25
8.4.1雷达支架气动部分设计…………………………………………………………25
8.5小型遥控探索机器人………………………………………………………………27
8.5.1小型遥控探索机器人力学分析…………………………………………………28
结束语 ……………………………………………………………………………… 31
致谢 ……………………………………………………………………………………32
关键词 灾难 救援 通讯 电力供应 机器人
目 录
1引言…………………………………………………………………………………1
1.1 慧鱼组合模型简介…………………………………………………………………2
2救援机器人项目的研究意义………………………………………………………… 3
2.1 城市地震救援面临的困难……………………………………………………… 4
2.2 救援队面临的困难……………………………………………………………… 5
2.3 机器人在救灾方面的优势……………………………………………………… 5
3救灾机器人的研究现状……………………………………………………………… 6
4国内外的救援机器人的研究现状…………………………………………………… 7
4.1 日本……………………………………………………………………………… 7
4.2 美国……………………………………………………………………………… 8
4.3 中国……………………………………………………………………………… 9
5机器人发展现状和趋势………………………………………………………………11
6通讯排障机器人设计思路……………………………………………………………11
6.1通讯方面……………………………………………………………………………12
6.2电力方面……………………………………………………………………………13
6.3地面废墟方面………………………………………………………………………13
6.4通讯排障机器人的设计……………………………………………………………14
7通讯排障机器人的扩展………………………………………………………………18
7.1思路介绍……………………………………………………………………………19
8通讯排障机器人个部位介绍及其运动分析…………………………………………20
8.1履带…………………………………………………………………………………20
8.1.1履带稳定性分析…………………………………………………………………21
8.2后背储存箱…………………………………………………………………………23
8.3空降设备……………………………………………………………………………24
8.4雷达装置……………………………………………………………………………25
8.4.1雷达支架气动部分设计…………………………………………………………25
8.5小型遥控探索机器人………………………………………………………………27
8.5.1小型遥控探索机器人力学分析…………………………………………………28
结束语 ……………………………………………………………………………… 31
致谢 ……………………………………………………………………………………32