设计简介
摘要
智能作为现代的新发明,是以后的发展方向,他可以按照预先设定的模式在一个环境里自动的运作,不需要人为的管理,可应用于科学勘探等等的用途。智能机器人就是其中的一个体现。本次设计的简易机器人,采用单片机作为小车的检测和控制核心;采用视觉传感器解决室内智能机器人的定位问题,实现机器人在复杂室内环境中的“完全自主” 。能使机器人在未知的环境下,通过自身传感器测量周围环境数据,逐渐估计自身位置和运动状况,并把信号反馈到单片机,使单片机按照预定的工作模式控制小车使小车能按照任意给定的黑色引导线平稳地寻迹。本次课题研究的内容是基于视觉移动机器人的设计与分析。内容包括:
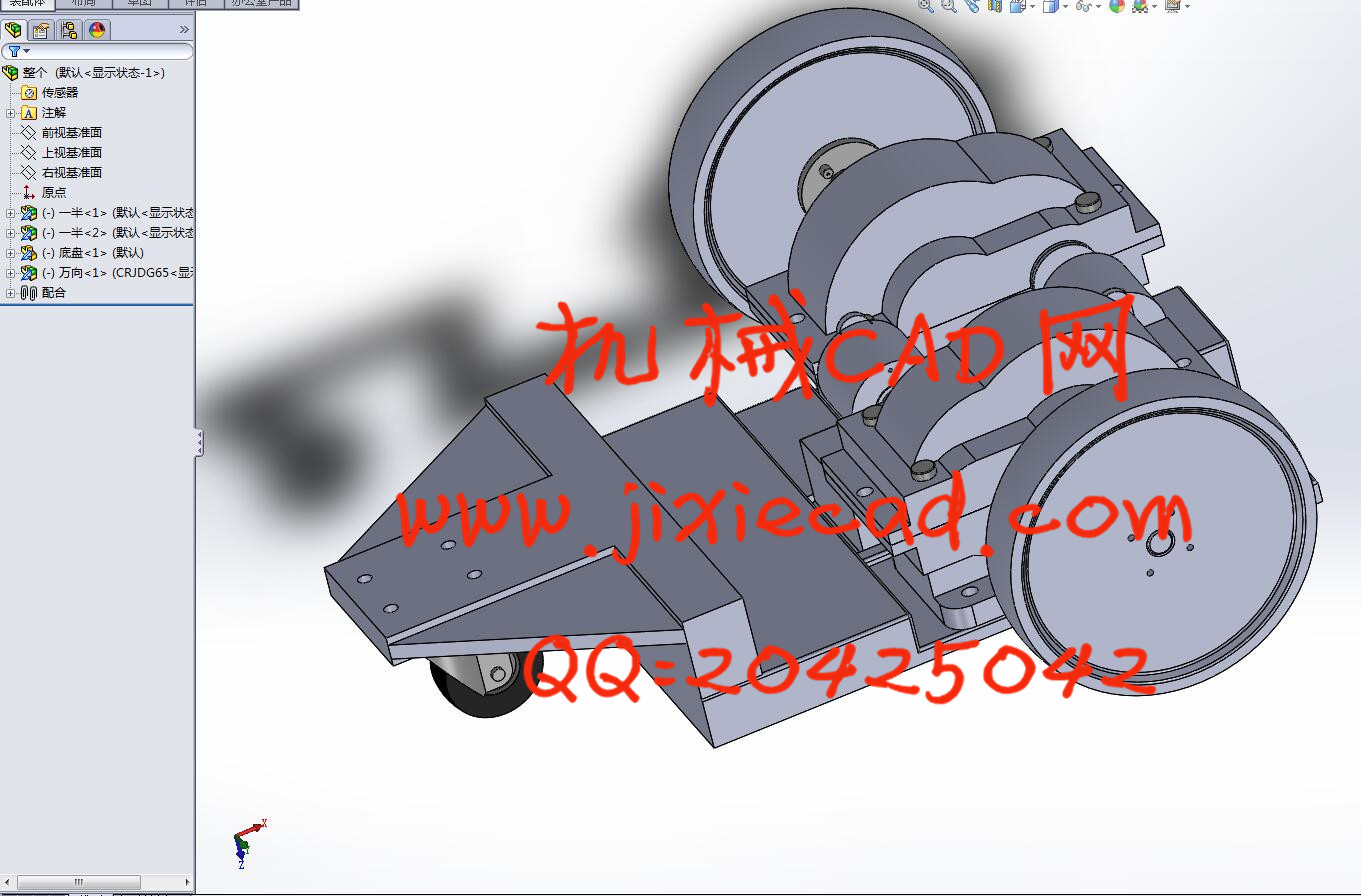
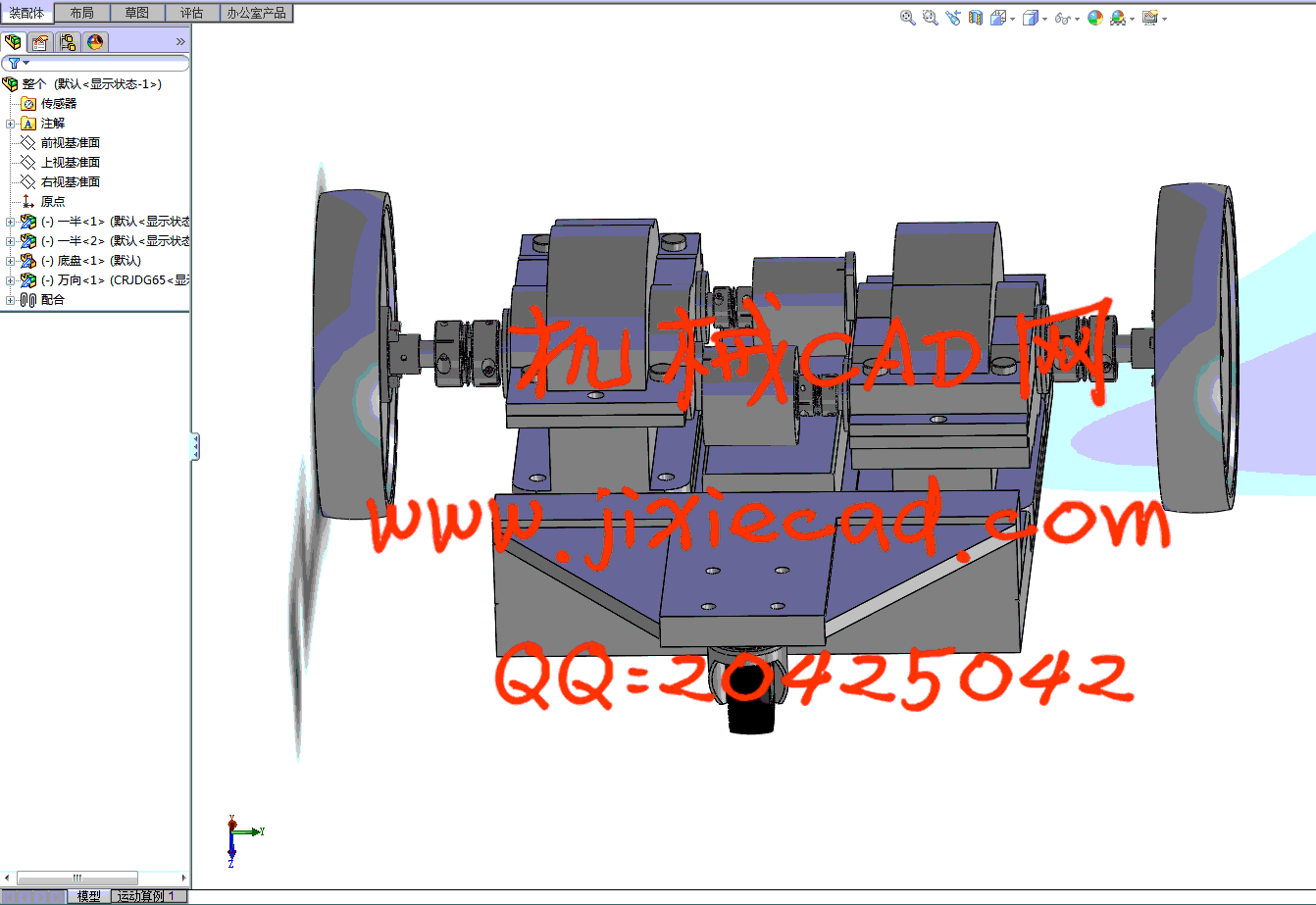
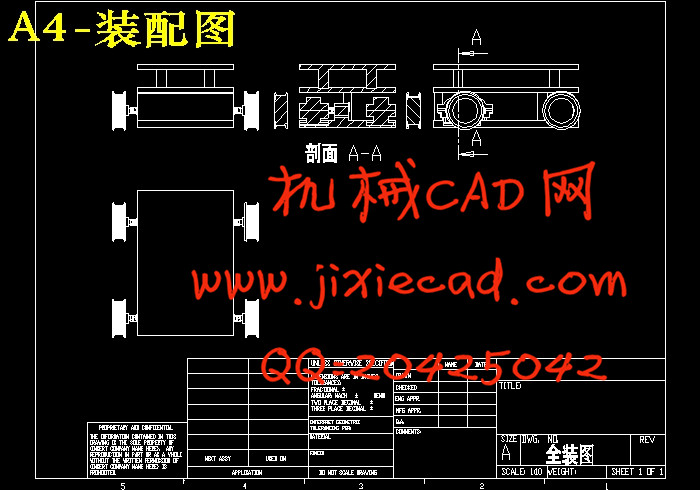
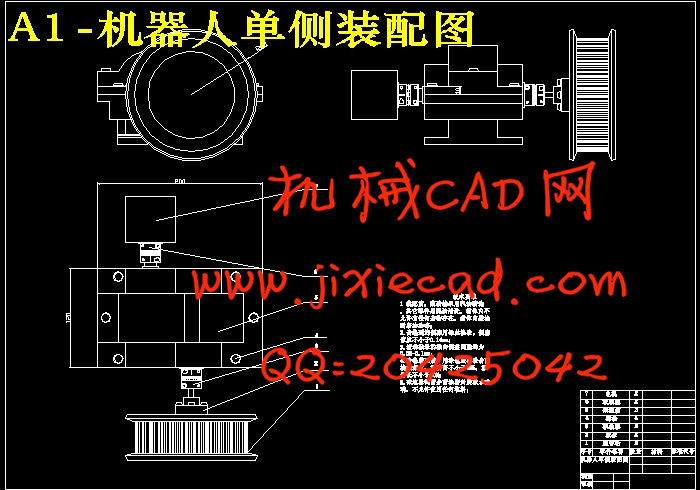
1.机械结构设计:机器人采用两轮独立驱动的履带结构,动力源采用直流无刷电机,减速和传动装置采用齿轮带传动,利用差速移动平台实现机器人的转向,选用增量式光电编码器进行对机器人速度的检测,实现机器人的定位。
2.控制结构设计:控制部分采用AT89C51型号单片机进行接受命令和产生驱动信号,电机的驱动部分采用L293D控制芯片,芯片利用接受到的单片机发出的信号来控制电机的转速。
3. 传感器部分:利用视觉传感器进行机器人的测距算法,视觉传感器位于机器人的传感器层
本设计结构简单,较容易实现,但具有高度的智能化、人性化,一定程 度体现了智能。
关键词:智能机器人 单片机 视觉传感器 智能
Abstract
Intelligence is modern new invention, is development in the hereafter direction, his operation being able to be automatic according to the pattern setting up in advance within a environment , the use not needing artificial managing, but applying to the science exploration and so on. The intelligence robot it is one among them to embody. Originally inferior design simpleness is robotic , adopt the monolithic machine to be the handcart detecting and to control core; Adopt optesthesia sensor to resolve the interior localized intelligence robot problem , realizes a robot "acting on self's own in interior hit the target complicated environment completeness". And can make robotic under unknown environment , gradually, estimate oneself location and move status by the fact that oneself sensor measures the environment data,coupling back the signal arrives at the monolithic machine , makes the monolithic machine can look for trace according to giving stable black the guidance line arbitrarily stable according to that the predetermined job pattern controls a handcart uses a handcart.The content of the research is based on visual design and analysis of mobile robot. Include:
1. Design of mechanical structure: the robot driven by two independent track structure, the power source using brushless DC motor, gear reducer and gear belt transmission by using differential steering mobile robot platform, use incremental photoelectric encoder for speed detection of robots, robot positioning.
2. Design of control structure: control part of the model using AT89C51 microcontroller for receiving orders and generate drive signals, the driving part is L293D motor control chip, chip microcontroller using the received signals to control motor speed.
3. Sensor parts: the robot using ultrasonic sensors for distance measurement method, ultrasonic sensors in the robot's sensor layer, using an ultrasonic distance measuring ring to improve the accuracy of the robot.
Design structure is simple , easier to come true, but have an altitude's intellectualized , personalize, certain degree has embodied intelligence.
key word: Intelligent robot Monolithic integrated circuit Visual sensor intelligence
目 录
摘 要 I
Abstract II
1 绪论 1
1.1 课题研究背景以及现实意义 1
1.2 智能机器人的发展 2
2设计任务以及方案的讨论 6
2.1设计任务概述 6
2.2 视觉移动机器人机械结构设计方案 6
2.3视觉移动机器人控制系统设计方案 8
2.4移动机器人的视觉系统设计方案 10
3 视觉移动机器人机械结构设计 11
3.1电动机的确定 11
3.2 减速器的确定 12
4 视觉移动机器人控制系统设计 16
4.1单片机 PIC16F877 16
4.2 步进电机 17
4.3步进电机驱动芯片L298 18
4.4开关电压调节器LM7805 19
5 移动机器人的视觉算法 20
5.1图像的采集 20
5.2图像的预处理 20
结论 24
致谢 25
参考文献 26