设计简介
摘 要
移动机器人 是机器人的一个重要分支,被广泛的应用于工业、国防及其民用设施上。随着机器人技术和人工智能技术的发展,如何让多个机器人相互协调、配合来共同的研究和实验模型,足球机器人系统是一个多学科交叉的前沿领域,它涉及到机器人学、智能控制技术、通信技术、计算机技术、传感器技术、图像处理和人工智能等方向,正在成为国内外许多大学研究、比赛和交流的公共实验平台。近年来人们对它的研究有了更大的关注。
是机器人的一个重要分支,被广泛的应用于工业、国防及其民用设施上。随着机器人技术和人工智能技术的发展,如何让多个机器人相互协调、配合来共同的研究和实验模型,足球机器人系统是一个多学科交叉的前沿领域,它涉及到机器人学、智能控制技术、通信技术、计算机技术、传感器技术、图像处理和人工智能等方向,正在成为国内外许多大学研究、比赛和交流的公共实验平台。近年来人们对它的研究有了更大的关注。
本次设计的研究内容就是基于视觉导航的履带式移动机器人,以足球机器人为研究模型,其核心内容是应用单片机 控制直流电机实现机器人的智能控制,采用视觉传感器解决移动机器人的定位问题,实现机器人在给定环境中的“完全自主” 。能使机器人在未知的环境下,通过自身传感器测量周围环境数据,逐渐估计自身位置和运动状况,并把信号反馈到单片机,使单片机按照预定的工作模式控制小车的运动控制。
控制直流电机实现机器人的智能控制,采用视觉传感器解决移动机器人的定位问题,实现机器人在给定环境中的“完全自主” 。能使机器人在未知的环境下,通过自身传感器测量周围环境数据,逐渐估计自身位置和运动状况,并把信号反馈到单片机,使单片机按照预定的工作模式控制小车的运动控制。
内容包括:
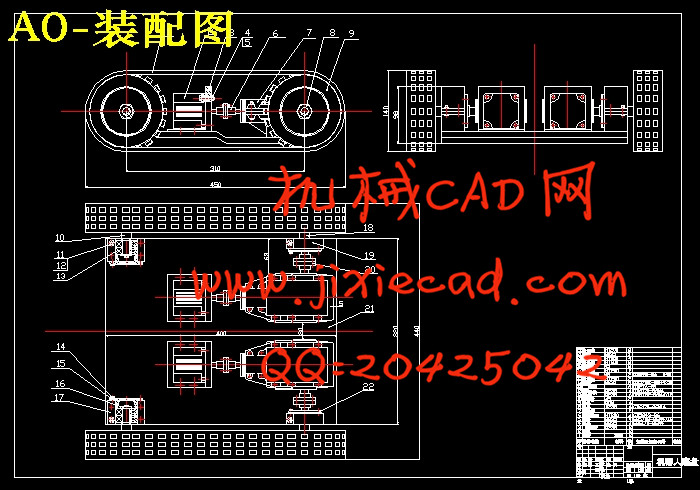
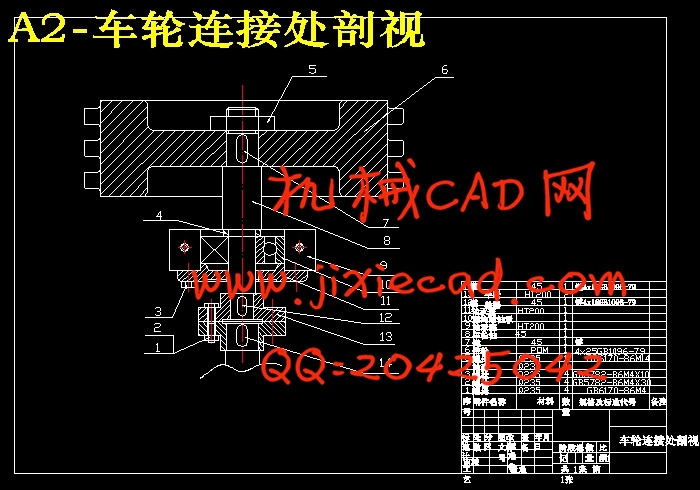
1.机械结构设计:机器人采用两轮独立驱动的履带结构,动力源采用直流无刷电机,减速和传动装置采用齿轮传动,利用差速移动平台实现机器人的转向,选用增量式光电编码器进行对机器人速度的检测,实现机器人的定位。
2.控制结构设计:控制部分采用AT89C51型号单片机进行接受命令和产生驱动信号,电机的驱动部分采用L293D控制芯片,芯片利用接受到的单片机发出的信号来控制电机的转速。
3. 传感器部分:利用视觉传感器收集图像,送至上位机进行图像处理。
关键词: 移动机器人 单片机 运动控制 视觉传感器 图像处理
Abstract
移动机器人
本次设计的研究内容就是基于视觉导航的履带式移动机器人,以足球机器人为研究模型,其核心内容是应用单片机
内容包括:
1.机械结构设计:机器人采用两轮独立驱动的履带结构,动力源采用直流无刷电机,减速和传动装置采用齿轮传动,利用差速移动平台实现机器人的转向,选用增量式光电编码器进行对机器人速度的检测,实现机器人的定位。
2.控制结构设计:控制部分采用AT89C51型号单片机进行接受命令和产生驱动信号,电机的驱动部分采用L293D控制芯片,芯片利用接受到的单片机发出的信号来控制电机的转速。
3. 传感器部分:利用视觉传感器收集图像,送至上位机进行图像处理。
关键词: 移动机器人 单片机 运动控制 视觉传感器 图像处理
Abstract
Mobile robot is an important branch of robotics and will be widely applied in both military field and civil area. With the development of robotics and artificial intelligence, scientists were often faced with issues on cooperation and coordination among different robots in a workspace. This has led to the developments in multi-robot cooperative systems MRCS. As a research model of MRCS, soccer robot is an interdisciplinary area that involves the knowledge of robotics, intelligence control, wireless communication, computer science, sensor technology, image processing, artificial intelligence, and so on. It has become a public experimental platform for universities all over the world to communicate with each other. It has gained considerable attention in recent years.
is an important branch of robotics and will be widely applied in both military field and civil area. With the development of robotics and artificial intelligence, scientists were often faced with issues on cooperation and coordination among different robots in a workspace. This has led to the developments in multi-robot cooperative systems MRCS. As a research model of MRCS, soccer robot is an interdisciplinary area that involves the knowledge of robotics, intelligence control, wireless communication, computer science, sensor technology, image processing, artificial intelligence, and so on. It has become a public experimental platform for universities all over the world to communicate with each other. It has gained considerable attention in recent years.
Originally inferior design simple ness is robotic, adopt the monolithic machine to be the handcart detecting and to control core; Adopt optesthesia sensor to resolve the interior localized intelligence robot problem , realizes a robot "acting on self's own in interior hit the target complicated environment completeness". And can make robotic under the unknown environment, gradually, estimate oneself location and move status by the fact that oneself sensor measures the environment data coupling back the signal arrives at the monolithic machine, makes the monolithic machine can look for trace according to giving stable black the guidance line arbitrarily stable according to that the predetermined job pattern controls a handcart uses a handcart.
to resolve the interior localized intelligence robot problem , realizes a robot "acting on self's own in interior hit the target complicated environment completeness". And can make robotic under the unknown environment, gradually, estimate oneself location and move status by the fact that oneself sensor measures the environment data coupling back the signal arrives at the monolithic machine, makes the monolithic machine can look for trace according to giving stable black the guidance line arbitrarily stable according to that the predetermined job pattern controls a handcart uses a handcart.
Contents Include:
1. Design of mechanical structure: the robot driven by two independent track structures, the power source using brushless DC motor, gear reducer and gear belt transmission by using differential steering mobile robot platform, use incremental photoelectric encoder for speed detection of robots, robot positioning.
2. Design of control structure: control part of the model using AT89C51 microcontroller for receiving orders and generates drive signals,the driving part is L293D motor control chip, chip microcontroller using the received signals to control motor speed.
3. Sensor parts: the robot using vision sensors for collect images, and send the images to upper-computer for image processing.
Key words:mobile robot, motion control, single chip, vision sensor , image processing
Originally inferior design simple ness is robotic, adopt the monolithic machine to be the handcart detecting and to control core; Adopt optesthesia sensor
Contents Include:
1. Design of mechanical structure: the robot driven by two independent track structures, the power source using brushless DC motor, gear reducer and gear belt transmission by using differential steering mobile robot platform, use incremental photoelectric encoder for speed detection of robots, robot positioning.
2. Design of control structure: control part of the model using AT89C51 microcontroller for receiving orders and generates drive signals,the driving part is L293D motor control chip, chip microcontroller using the received signals to control motor speed.
3. Sensor parts: the robot using vision sensors for collect images, and send the images to upper-computer for image processing.
Key words:mobile robot, motion control, single chip, vision sensor , image processing
目 录
摘 要 I
Abstract II
1移动机器人 1
1.1移动机器人的研究历史 1
1.2课题的现实意义 1
1.3智能机器人的发展 2
1.3.1智能机器人的定义 2
1.3.2国外机器人的发展 3
1.3.3国内机器人的发展 3
2视觉移动机器人方案的确定 5
2.1设计任务概述 5
2.2视觉移动机器人机械结构设计方案 5
2.2.1动力源的论证与选择 5
2.2.2运动方式的选择 6
2.2.3电源的论证与选择 6
2.2.4传动方式的选择 6
2.2.5传感器的选择 7
2.2.6最终方案: 7
2.3视觉移动机器人控制系统设计方案 7
2.3.1控制系统的选择 8
2.3.2控制器的软件设计 8
3视觉移动机器人方案的确定 10
3.1电动机的确定 10
3.1.1电动机功率的选择 10
3.1.2电动机转速的选择 10
3.2 圆锥圆柱减速器的设计 11
3.2.1传动方案的选择 11
3.2.2传动零件的设计计算 12
3.2.2.1圆锥齿轮传动的设计计算 12
3.2.2.2圆柱齿轮传动的设计计算 16
3.2.2.3数据整理 19
3.2.2.4轴的设计 19
3.2.3减速箱轴承的确定 20
3.2.4联轴器的选择 21
4 视觉移动机器人控制系统设计 22
4.1机器人电子元件的选型 22
4.1.1单片机 PIC16F877 22
4.1.2直流无刷电机 24
5移动机器人的图像处理技术 26
5.1图像的采集 26
5.2图像的预处理 26
5.2.1彩色图像灰度化 26
5.2.2灰度图像的平滑处理 27
5.2.3颜色模型转换 29
结 论 30
致 谢 31
参考文献 32