设计简介
机器人是人类活动的一种拟人智能替代者,是对人类各种功能模拟和增强。移动机器人是机器人学的一个重要分支,是一个集环境感知、动态智能决策与规划、行为智能控制与执行等多种功能于一体的综合系统。
本文根据《第四届全国大学生机械创新设计大赛主题与内容的通知》精神,主题为“珍爱生命,奉献社会”,内容为“在突发灾难中,用于救援、破障、逃生、避难的机械产品的设计与制作”。研究并设计了在火灾、水灾、地震、矿难等灾害发生时,为抢救人民生命和财产,所使用的机械。并对该机械软件部分进行详细说明。
关键词 机械设计大赛 软件设计 排障通讯 寻迹机器人
Abstract
Robot is a human activity intended to substitute for human intelligence is the simulation of human features and enhancements. Mobile robot is an important branch of robotics, is a set of environmental awareness, dynamic intelligent decision-making and planning, conduct and implementation of intelligent control many functions in one integrated system.
This according to the "Fourth National College creative design contest theme and content of the notice" the spirit of, The theme "Live Life, contributing to society",Content "in the sudden disaster, for the rescue, breaking barriers, escape, refuge of mechanical product design and production". Research and design in the fire, flood, earthquake, mining accidents and other disasters, in order to save people's lives and property, the use of machinery. And software parts of the mechanical details.
Keywords Machine Design Competition Software Design Troubleshooting communications Tracing Robot
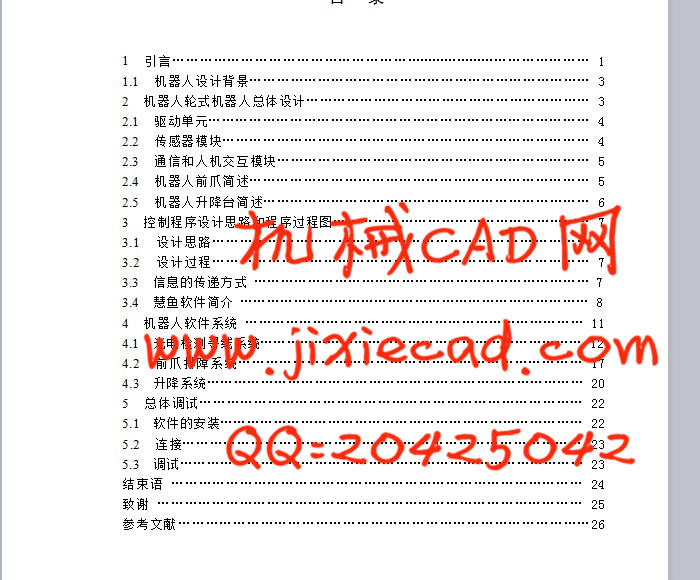
目 录
1 引言………………………………………………………………………………… 1
1.1 机器人设计背景………………………………………………………………… 3
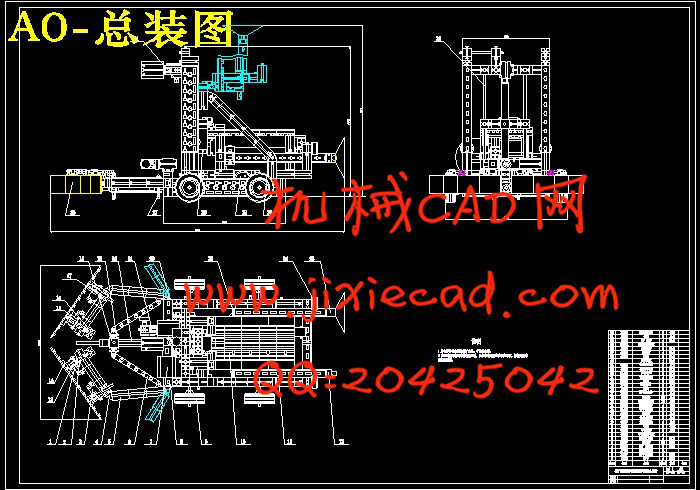
2 机器人轮式机器人总体设计……………………………………………………… 3
2.1 驱动单元………………………………………………………………………… 4
2.2 传感器模块……………………………………………………………………… 4
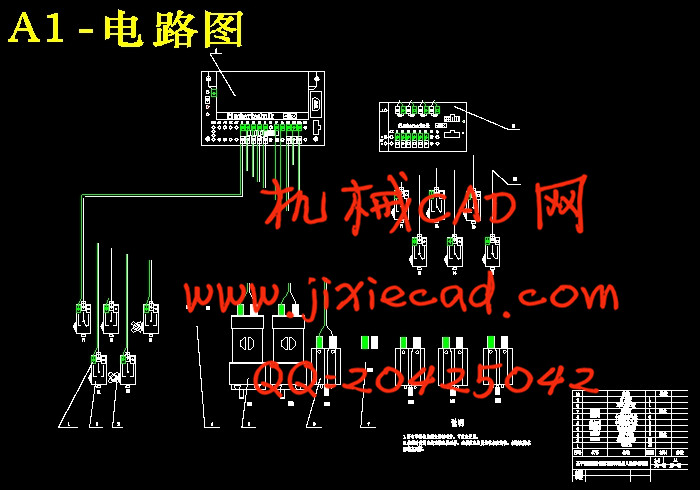
2.3 通信和人机交互模块…………………………………………………………… 5
2.4 机器人前爪简述………………………………………………………………… 5
2.5 机器人升降台简述……………………………………………………………… 6
3 控制程序设计思路和程序过程图………………………………………………… 7
3.1 设计思路……………………………………………………………………… 7
3.2 设计过程……………………………………………………………………… 7
3.3 信息的传递方式 ………………………………………………………………… 7
3.4 慧鱼软件简介 …………………………………………………………………… 8
4 机器人软件系统 ………………………………………………………………… 11
4.1 光电检测寻线系统……………………………………………………………… 12
4.2 前爪排障系统………………………………………………………………… 17
4.3 升降系统………………………………………………………………………… 20
5 总体调试………………………………………………………………………… 22
5.1 软件的安装……………………………………………………………………… 22
5.2 连接…………………………………………………………………………… 23
5.3 调试……………………………………………………………………………… 23
结束语 ……………………………………………………………………………… 24
致谢 ………………………………………………………………………………… 25
参考文献………………………………………………………………………………26
本文根据《第四届全国大学生机械创新设计大赛主题与内容的通知》精神,主题为“珍爱生命,奉献社会”,内容为“在突发灾难中,用于救援、破障、逃生、避难的机械产品的设计与制作”。研究并设计了在火灾、水灾、地震、矿难等灾害发生时,为抢救人民生命和财产,所使用的机械。并对该机械软件部分进行详细说明。
关键词 机械设计大赛 软件设计 排障通讯 寻迹机器人
Abstract
Robot is a human activity intended to substitute for human intelligence is the simulation of human features and enhancements. Mobile robot is an important branch of robotics, is a set of environmental awareness, dynamic intelligent decision-making and planning, conduct and implementation of intelligent control many functions in one integrated system.
This according to the "Fourth National College creative design contest theme and content of the notice" the spirit of, The theme "Live Life, contributing to society",Content "in the sudden disaster, for the rescue, breaking barriers, escape, refuge of mechanical product design and production". Research and design in the fire, flood, earthquake, mining accidents and other disasters, in order to save people's lives and property, the use of machinery. And software parts of the mechanical details.
Keywords Machine Design Competition Software Design Troubleshooting communications Tracing Robot
目 录
1 引言………………………………………………………………………………… 1
1.1 机器人设计背景………………………………………………………………… 3
2 机器人轮式机器人总体设计……………………………………………………… 3
2.1 驱动单元………………………………………………………………………… 4
2.2 传感器模块……………………………………………………………………… 4
2.3 通信和人机交互模块…………………………………………………………… 5
2.4 机器人前爪简述………………………………………………………………… 5
2.5 机器人升降台简述……………………………………………………………… 6
3 控制程序设计思路和程序过程图………………………………………………… 7
3.1 设计思路……………………………………………………………………… 7
3.2 设计过程……………………………………………………………………… 7
3.3 信息的传递方式 ………………………………………………………………… 7
3.4 慧鱼软件简介 …………………………………………………………………… 8
4 机器人软件系统 ………………………………………………………………… 11
4.1 光电检测寻线系统……………………………………………………………… 12
4.2 前爪排障系统………………………………………………………………… 17
4.3 升降系统………………………………………………………………………… 20
5 总体调试………………………………………………………………………… 22
5.1 软件的安装……………………………………………………………………… 22
5.2 连接…………………………………………………………………………… 23
5.3 调试……………………………………………………………………………… 23
结束语 ……………………………………………………………………………… 24
致谢 ………………………………………………………………………………… 25
参考文献………………………………………………………………………………26