设计简介
摘 要
机器人是一种自动化的机器,所不同的是这种机器具备一些与人或生物相似的智能,如感知能力、规划能力、动作能力和协同能力,是一种具有高度灵活性的自动化机器。 本次课题研究的内容是基于超声波移动机器人的设计与分析。本文的设计内容包括:
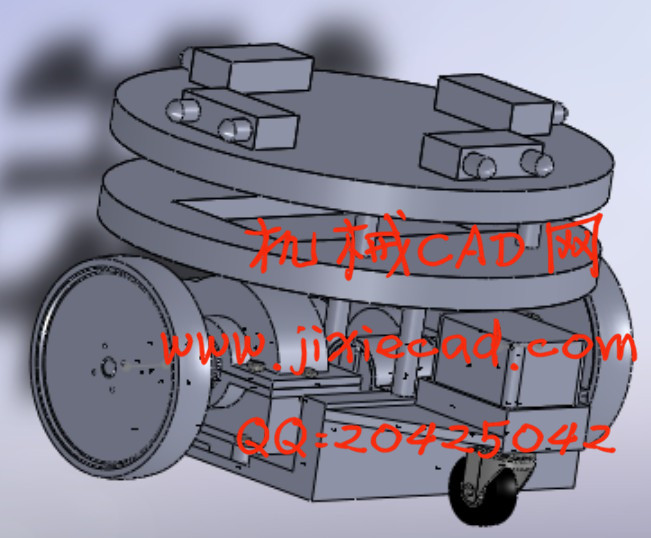
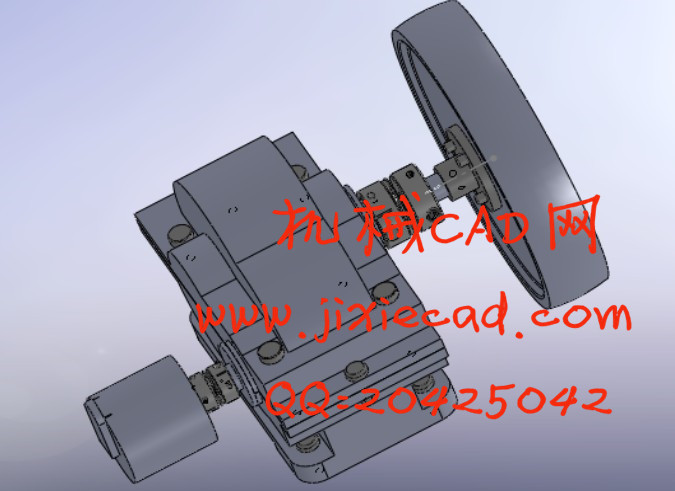
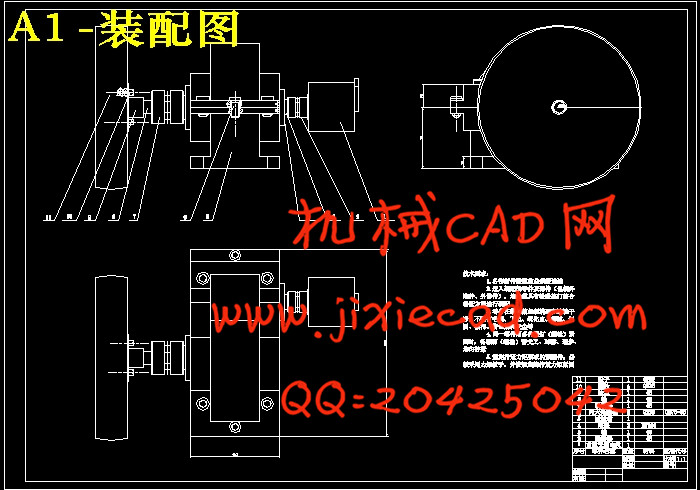
1. 机械结构设计:机器人采用两轮独立驱动的轮式结构,动力源采用直流无刷电机,减速和传动装置采用皮带传动,利用差速移动平台实现机器人的转向,选用增量式光电编码器进行对机器人速度的检测,实现机器人的定位。
2. 传感器部分:使用超声波传感器作为机器人主传感器,超声波传感器位于机器人的传感器层,采用一个超声波环提高机器人测距的精度。超声波发射装置发出超声波,超声波遇到障碍物反射回来,由超声波接收器接收超声波信号,获取机器人的外部信息。
3.控制系统设计:控制部分采用AT89C51型号单片机进行接受命令和产生驱动信号,电机的驱动部分采用L298控制芯片,芯片利用接受到的单片机发出的信号来控制电机的转速。超声波接收器接收到信号后,经由单片机进行分析运算,得出机器人与障碍物之间的距离,然后单片机发出信号控制电机的转速发生改变,使得移动机器人可以自主地改变行进路线,实现了机器人的避障算法。
关键词:移动机器人,超声波,单片机,运动控制,避障。
Abstract
Robot is an automated machine, the difference is that this machine has some similarities with the human or biological intelligence, such as perception, planning ability, motor ability, and collaboration capabilities, is a highly flexible automated machines. The content of this research project is based on ultrasonic Mobile Robot Design and Analysis. This design includes:
1.Mechanical structure design: robots with two independently driven wheel structure, the power source using brushless DC motor, gear reducer and belt drive by using the differential steering mobile robot platform, use incremental photoelectric encoder for speed detection of robots, robot positioning.
2.Sensor parts: the robot uses ultrasonic sensors as the primary sensor, ultrasonic sensor in the robot's sensor layer, using an ultrasonic distance measuring ring to improve the accuracy of the robot. Send ultrasonic ultrasonic transmitter and ultrasonic obstacle reflected back by the ultrasonic receiver receives ultrasonic signals to obtain the robot's external information.
3.Control System: Control part of the model using AT89C51 microcontroller for receiving orders and generate drive signal, the motor drive control part is L298 chip, chip microcontroller using the received signals to control motor speed. Ultrasonic signal received by the receiver, the analysis by microcomputer operation, obtained the distance between the robot and obstacles, and then signal the microcontroller to change the motor control, making autonomous mobile robot can change the route of the realized robot obstacle avoidance algorithm.
Keywords: Mobile Robot, ultrasound, MCU, motion control, obstacle avoidance.
目 录
摘 要 I
Abstract II
前 言 1
1 移动机器人概述 2
1.1 机器人的研究历史 2
1.2 移动机器人的意义 4
1.3 移动机器人国内外发展现状 5
2 超声波移动机器人设计方案的确定 9
2.1 超声波移动机器人机械结构设计方案 9
2.2 超声波移动机器人控制系统设计方案 10
2.3 移动机器人的超声波系统设计方案 11
2.4 移动机器人方案总结 12
3 超声波移动机器人机械机构设计 13
3.1 电动机的确定 13
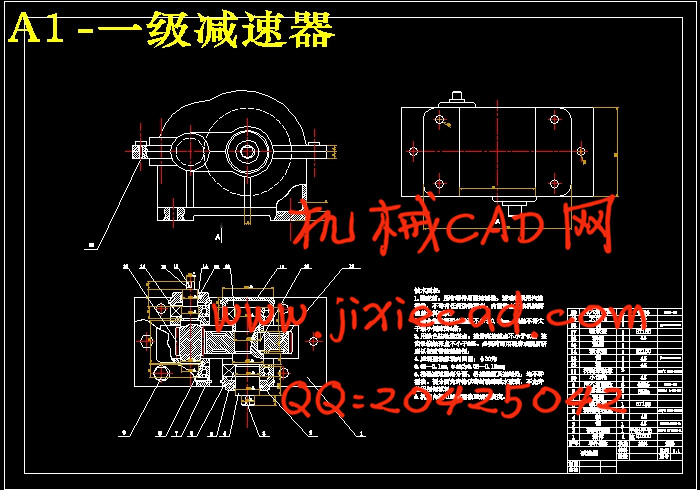
3.2 减速器的确定 13
3.3 机器人连接方式的确定 16
4 超声波移动机器人控制系统设计 18
4.1 机器人的运动学方程 18
4.2 单片机控制系统 20
4.3 电机驱动电路系统 21
5 超声波测距算法 23
5.1 超声波应用的可行性 23
5.2 超声波的产生和接收 23
5.3 超声波的传输特性 25
5.4 超声波测距原理 26
5.5 计算超声波传播时间 27
5.6 测渡越时间测量法 27
5.7 超声波测距误差分析 28
结 论 30
致 谢 31
参考文献 32
机器人是一种自动化的机器,所不同的是这种机器具备一些与人或生物相似的智能,如感知能力、规划能力、动作能力和协同能力,是一种具有高度灵活性的自动化机器。 本次课题研究的内容是基于超声波移动机器人的设计与分析。本文的设计内容包括:
1. 机械结构设计:机器人采用两轮独立驱动的轮式结构,动力源采用直流无刷电机,减速和传动装置采用皮带传动,利用差速移动平台实现机器人的转向,选用增量式光电编码器进行对机器人速度的检测,实现机器人的定位。
2. 传感器部分:使用超声波传感器作为机器人主传感器,超声波传感器位于机器人的传感器层,采用一个超声波环提高机器人测距的精度。超声波发射装置发出超声波,超声波遇到障碍物反射回来,由超声波接收器接收超声波信号,获取机器人的外部信息。
3.控制系统设计:控制部分采用AT89C51型号单片机进行接受命令和产生驱动信号,电机的驱动部分采用L298控制芯片,芯片利用接受到的单片机发出的信号来控制电机的转速。超声波接收器接收到信号后,经由单片机进行分析运算,得出机器人与障碍物之间的距离,然后单片机发出信号控制电机的转速发生改变,使得移动机器人可以自主地改变行进路线,实现了机器人的避障算法。
关键词:移动机器人,超声波,单片机,运动控制,避障。
Abstract
Robot is an automated machine, the difference is that this machine has some similarities with the human or biological intelligence, such as perception, planning ability, motor ability, and collaboration capabilities, is a highly flexible automated machines. The content of this research project is based on ultrasonic Mobile Robot Design and Analysis. This design includes:
1.Mechanical structure design: robots with two independently driven wheel structure, the power source using brushless DC motor, gear reducer and belt drive by using the differential steering mobile robot platform, use incremental photoelectric encoder for speed detection of robots, robot positioning.
2.Sensor parts: the robot uses ultrasonic sensors as the primary sensor, ultrasonic sensor in the robot's sensor layer, using an ultrasonic distance measuring ring to improve the accuracy of the robot. Send ultrasonic ultrasonic transmitter and ultrasonic obstacle reflected back by the ultrasonic receiver receives ultrasonic signals to obtain the robot's external information.
3.Control System: Control part of the model using AT89C51 microcontroller for receiving orders and generate drive signal, the motor drive control part is L298 chip, chip microcontroller using the received signals to control motor speed. Ultrasonic signal received by the receiver, the analysis by microcomputer operation, obtained the distance between the robot and obstacles, and then signal the microcontroller to change the motor control, making autonomous mobile robot can change the route of the realized robot obstacle avoidance algorithm.
Keywords: Mobile Robot, ultrasound, MCU, motion control, obstacle avoidance.
目 录
摘 要 I
Abstract II
前 言 1
1 移动机器人概述 2
1.1 机器人的研究历史 2
1.2 移动机器人的意义 4
1.3 移动机器人国内外发展现状 5
2 超声波移动机器人设计方案的确定 9
2.1 超声波移动机器人机械结构设计方案 9
2.2 超声波移动机器人控制系统设计方案 10
2.3 移动机器人的超声波系统设计方案 11
2.4 移动机器人方案总结 12
3 超声波移动机器人机械机构设计 13
3.1 电动机的确定 13
3.2 减速器的确定 13
3.3 机器人连接方式的确定 16
4 超声波移动机器人控制系统设计 18
4.1 机器人的运动学方程 18
4.2 单片机控制系统 20
4.3 电机驱动电路系统 21
5 超声波测距算法 23
5.1 超声波应用的可行性 23
5.2 超声波的产生和接收 23
5.3 超声波的传输特性 25
5.4 超声波测距原理 26
5.5 计算超声波传播时间 27
5.6 测渡越时间测量法 27
5.7 超声波测距误差分析 28
结 论 30
致 谢 31
参考文献 32