设计简介
摘 要
在工业生产和其他领域内,由于工作的需要,人们经常受到高温、腐蚀及有毒气体等因素的危害,增加了工人的劳动强度,甚至于危及生命。自从自动化控制装置问世以来,相应的各种难题迎刃而解。自动化控制装置可在空间抓、放、搬运物体,动作灵活多样,适用于可变换生产品种的中、小批量自动化生产,广泛应用于柔性自动线。自动化控制装置一般由耐高温,抗腐蚀的材料制成,以适应现场恶劣的环境,大大降低了工人的劳动强度,提高了工作效率。自动化控制装置是工业机器人的重要组成部分,在很多情况下它就可以称为工业机器人。工业机器人是集机械、电子、控制、计算机、传感器、人工智能等多学科先进技术于一体的现代制造业重要的自动化装备。可编程控制器是继电器控制和计算机控制出上开发的产品,逐渐发展成以微器处理为核心把自动化技术、计算机技术、通信技术融为一体的新型工业自动控制装置。本文应用三菱公司生产的可编程控制器FX系列PLC,实现自动化控制装置搬运控制系统,该系统充分利用了可编程控制器(PLC)控制功能。使该系统可靠稳定,时期功能范围得到广泛应用。关键词:物料搬运,可编程控制器,自动化,限位开关
Abstract
In the industrial production and other fields, as a result of the need, people are often subjected to high temperature, corrosive and toxic gases and other factors, an increase of labor intensity, and even life-threatening. Since the mechanical hand inception, corresponding to the various problems be smoothly done or easily solved. In space manipulator can be caught, put, carry objects, flexible, applicable to the production varieties can be switched, in small batch production, widely used in flexible automatic production line. Mechanical hands by high temperature resistant, corrosion resistant material, in order to adapt to the harsh environment, greatly reducing the labor intensity of workers, improves the work efficiency. The manipulator is an important component of industrial robots, in many cases it can be called industrial robot. Industrial robot is set machinery, electronics, control, computers, sensors, artificial intelligence and other advanced technologies in the integration of multidisciplinary important modern manufacturing equipment. The programmable controller is a relay control and computer control on development of products, and gradually developed into a microfluidic device processing as the core of the automation technology, computer technology, communication technology com. New industrial automatic control device. In this paper the application of Mitsubishi company production of programmable controller FX series PLC, realize the manipulator transportation control system, the system makes full use of the programmable logic controller ( PLC ) control function. So that the system is reliable and stable, time functional scope obtains the widespread application.Key Words: Material handling, programmable controller, automation, limit switch
目 录
摘 要 IIIAbstract IV
目 录 V
第1章 绪论 1
1.1 课题的背景和意义 1
1.2 课题国内外发展现状 2
第二章 总体方案确定 3
2.1 总体方案论证 3
2.1.1 自动化控制装置手臂结构方案设计 4
2.1.2 自动化控制装置驱动方案设计 4
2.1.3 自动化控制装置控制方案设计 4
2.2 PLC 慨况 5
2.2.1 PLC的结构及基本配置 6
2.2.2 PLC的选型 9
2.2.3 PLC的工作过程 9
2.3自动化控制装置 12
2.3.1自动化控制装置简介 12
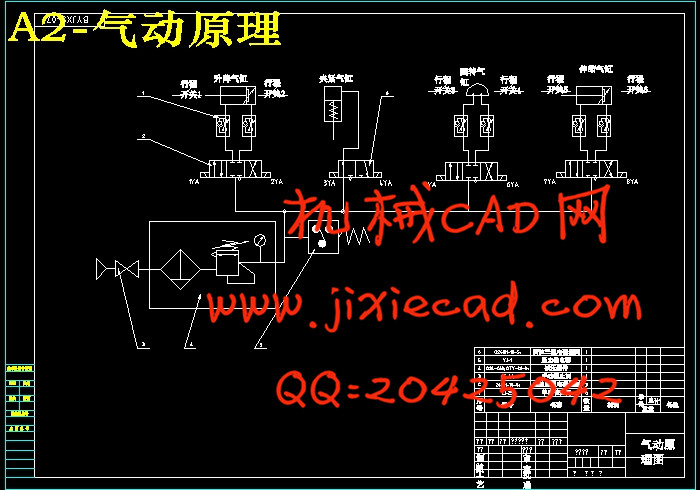
第3章 气动部分设计 14
第4章 PLC控制部分设计 15
4.1 电磁铁动作顺序 15
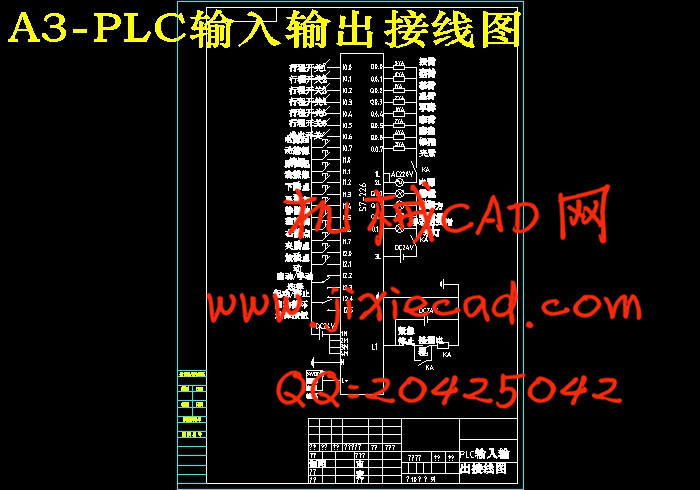
4.2 I/O分配 16
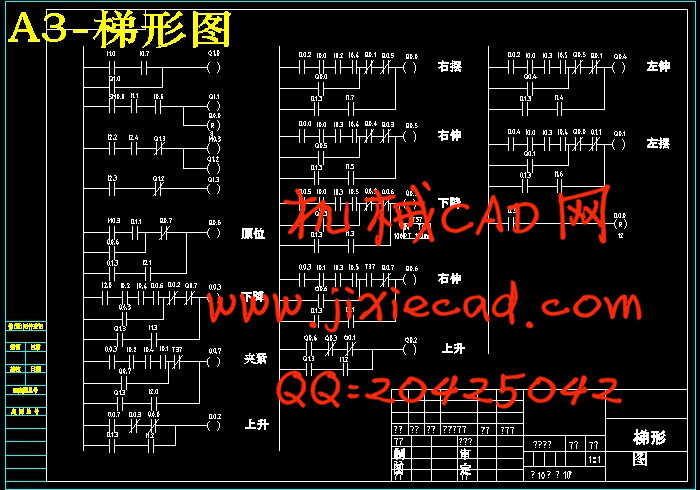
4.3 PLC控制梯形图 17
4.3 PLC控制程序指令 18
总 结 23
参考文献 24
致 谢 25