设计简介
摘要
随着机器人技术的飞速发展,工业机器人的应用领域正在不断的扩大,对教育培训部门提出了新的要求,为提高机器人教学的水平,我们研制了一套以实验教学为目的的机器人演示系统。
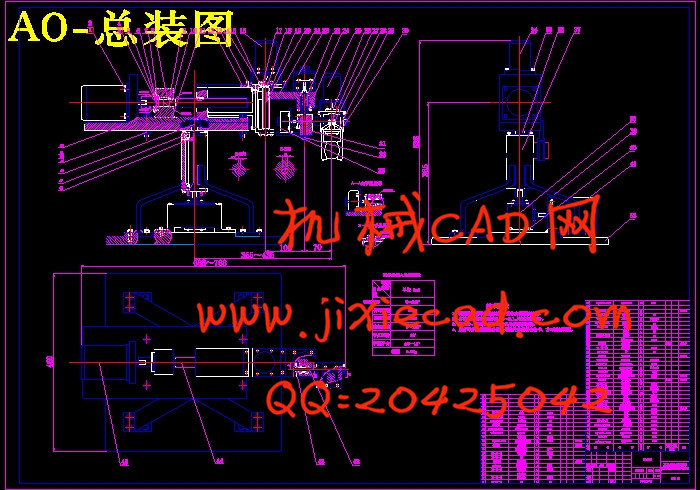
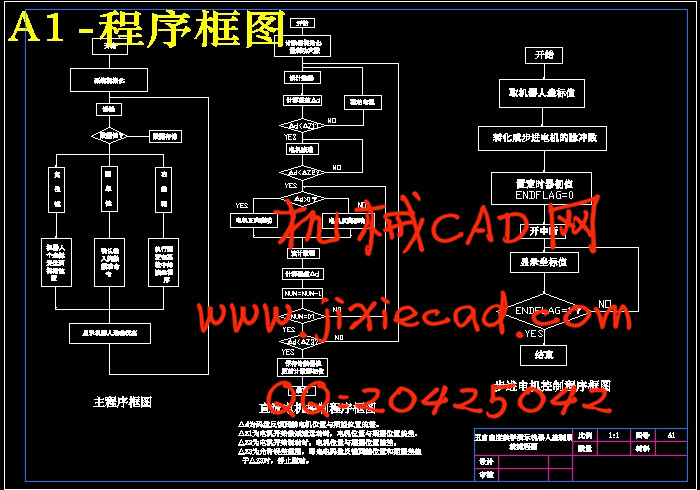
本文阐述了机器人的发展历程,国内外的应用现状,及其巨大的优越性,提出具体的机器人设计要求,进行了本演示系统的总体方案设计和各自由度具体结构设计、计算;对演示系统的控制部分的研制,其中包括:进电机开环控制;光电码盘为反馈元件的,以PWM型功放电路为驱动器的直流电机闭环控制;以89C51单片机为核心,实现演示系统的键盘管理和LCD显示,并以单CPU分时控制形式,实现机器人运动的点位控制方式。
最后设计制定出利用本演示系统所开设的几个实验的指导书。
关键字:教学机器人、结构设计、闭环控制、演示实验
Abstract
With the development of robot technology, the continual expansion of application of industrial robots presents newrequire-ments before education and training agencies.We have developed a robot demonstration system for experiments in training to improve the teaching effect of “Robot Teaching”.
Firstly, this paper discusses the development course ,the study both in demestic and in external, the significant advantages of robot and then gives the supporting source of the study and the technical requirements, Secoundly,this paper discusses the overall design and calculation on each degree of freedom ,and about the study on the control part of the Training Robot system,which includes the open-loop control of the stepping motor ,the digital closed-loop control of the DC motor with an optical-electrical encoder as feedback cell and the PWM power amplifier as driver .The keyboard management and the LCD display is based on a 89C51 singal plate computer .It is achieved in point to point control by a singal CPU with share time.
At the end, it presents guidances to some experiments on the demonstration system.
Keywords: Training Robot、Structure Design、Closed-Loop Control 、Demonstrating Experiment.
目 录
摘要 1
Abstract 2
第1章 绪论 1
1.1 机器人概述 1
1.1.1 机器人的诞生与发展 1
1.1.2 国内发展状况 2
1.1.3 国外机器人发展趋势 3
1.2 机器人产业对教育、培训的要求及本课题的提出 3
第2章 总体设计方案 5
2.1 总体设计的思路 5
2.2 总体方案的确定 5
2.2.1 坐标形式的选择 6
2.2.2 驱动系统的类型选择 6
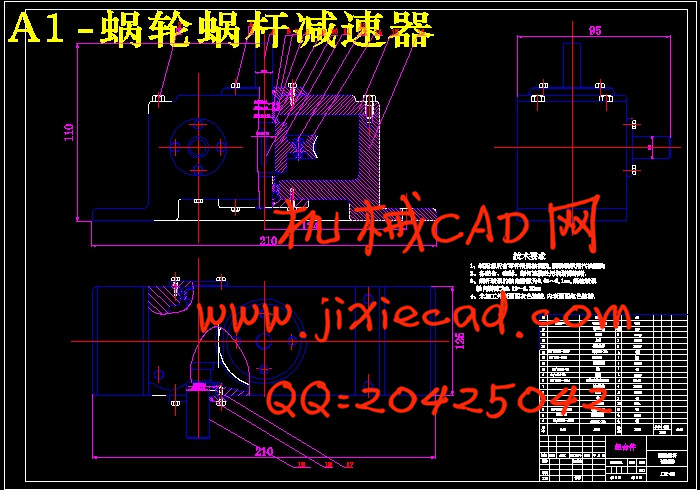
2.2.3 各部位传动机构的确定 6
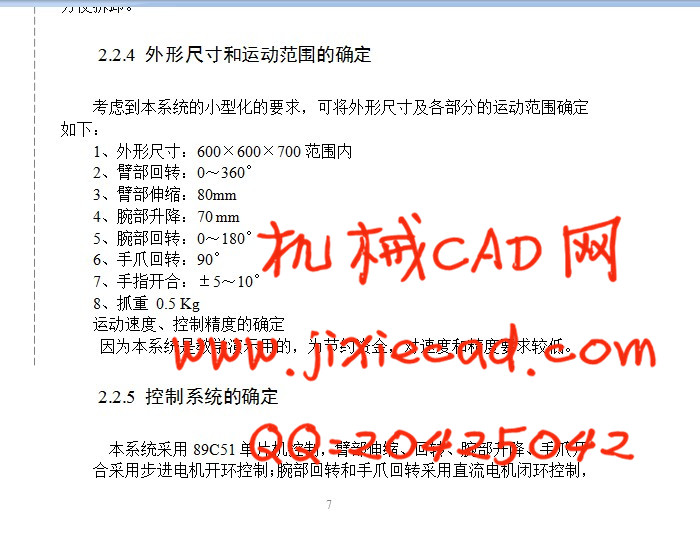
2.2.4 外形尺寸和运动范围的确定 7
2.2.5 控制系统的确定 7
第3章 结构设计及计算 9
3.1 手部夹持器的结构设计 9
3.1.1 概述 9
3.1.2 手部的结构和手指形状的确定 9
3.1.3 手部驱动力的计算和电机的选择 10
3.2 腕部结构设计 13
3.2.1 概述 13
3.2.2 腕部结构设计 14
3.3 臂部及机身(底座)的设计计算 18
3.3.1 概述 18
3.3.2 结构设计计算 19
第4章 控制系统设计 25
4.1 控制系统方案的确定 25
4.1.1 控制方案的确定 25
4.1.2 驱动方式的确定 25
4.1.3 控制系统类型的确定 25
4.1.4 步进电机控制方式的确定 26
4.1.5 直流电机控制方式的确定 26
4.1.6 键盘及显示方式的确定 26
4.2 演示系统的组成 26
4.3 驱动电路的研制 29
4.3.1 恒流源型步进电机驱动电路的研制 29
4.3.2 双极型PWM直流力矩电机的驱动电路的研制 31
4.3.3 光电码盘的选择和辩向电路的研制, 33
4.3.4 直流电机的闭环控制系统的研制。 36
4.3.5 以单片机为核心的机器人控制系统的研制 36
第5章 技术经济分析 46
第6章 教学机器人演示系统演示实验的设计 47
6.1 实验一 教学机器人演示系统的组成及结构 47
6.2 实验二:教学机器人控制系统的演示实验 48
结论 50
专题部分:——旋转电机的分类及其总结 51
致谢 61
参考文献 62
随着机器人技术的飞速发展,工业机器人的应用领域正在不断的扩大,对教育培训部门提出了新的要求,为提高机器人教学的水平,我们研制了一套以实验教学为目的的机器人演示系统。
本文阐述了机器人的发展历程,国内外的应用现状,及其巨大的优越性,提出具体的机器人设计要求,进行了本演示系统的总体方案设计和各自由度具体结构设计、计算;对演示系统的控制部分的研制,其中包括:进电机开环控制;光电码盘为反馈元件的,以PWM型功放电路为驱动器的直流电机闭环控制;以89C51单片机为核心,实现演示系统的键盘管理和LCD显示,并以单CPU分时控制形式,实现机器人运动的点位控制方式。
最后设计制定出利用本演示系统所开设的几个实验的指导书。
关键字:教学机器人、结构设计、闭环控制、演示实验
Abstract
With the development of robot technology, the continual expansion of application of industrial robots presents newrequire-ments before education and training agencies.We have developed a robot demonstration system for experiments in training to improve the teaching effect of “Robot Teaching”.
Firstly, this paper discusses the development course ,the study both in demestic and in external, the significant advantages of robot and then gives the supporting source of the study and the technical requirements, Secoundly,this paper discusses the overall design and calculation on each degree of freedom ,and about the study on the control part of the Training Robot system,which includes the open-loop control of the stepping motor ,the digital closed-loop control of the DC motor with an optical-electrical encoder as feedback cell and the PWM power amplifier as driver .The keyboard management and the LCD display is based on a 89C51 singal plate computer .It is achieved in point to point control by a singal CPU with share time.
At the end, it presents guidances to some experiments on the demonstration system.
Keywords: Training Robot、Structure Design、Closed-Loop Control 、Demonstrating Experiment.
目 录
摘要 1
Abstract 2
第1章 绪论 1
1.1 机器人概述 1
1.1.1 机器人的诞生与发展 1
1.1.2 国内发展状况 2
1.1.3 国外机器人发展趋势 3
1.2 机器人产业对教育、培训的要求及本课题的提出 3
第2章 总体设计方案 5
2.1 总体设计的思路 5
2.2 总体方案的确定 5
2.2.1 坐标形式的选择 6
2.2.2 驱动系统的类型选择 6
2.2.3 各部位传动机构的确定 6
2.2.4 外形尺寸和运动范围的确定 7
2.2.5 控制系统的确定 7
第3章 结构设计及计算 9
3.1 手部夹持器的结构设计 9
3.1.1 概述 9
3.1.2 手部的结构和手指形状的确定 9
3.1.3 手部驱动力的计算和电机的选择 10
3.2 腕部结构设计 13
3.2.1 概述 13
3.2.2 腕部结构设计 14
3.3 臂部及机身(底座)的设计计算 18
3.3.1 概述 18
3.3.2 结构设计计算 19
第4章 控制系统设计 25
4.1 控制系统方案的确定 25
4.1.1 控制方案的确定 25
4.1.2 驱动方式的确定 25
4.1.3 控制系统类型的确定 25
4.1.4 步进电机控制方式的确定 26
4.1.5 直流电机控制方式的确定 26
4.1.6 键盘及显示方式的确定 26
4.2 演示系统的组成 26
4.3 驱动电路的研制 29
4.3.1 恒流源型步进电机驱动电路的研制 29
4.3.2 双极型PWM直流力矩电机的驱动电路的研制 31
4.3.3 光电码盘的选择和辩向电路的研制, 33
4.3.4 直流电机的闭环控制系统的研制。 36
4.3.5 以单片机为核心的机器人控制系统的研制 36
第5章 技术经济分析 46
第6章 教学机器人演示系统演示实验的设计 47
6.1 实验一 教学机器人演示系统的组成及结构 47
6.2 实验二:教学机器人控制系统的演示实验 48
结论 50
专题部分:——旋转电机的分类及其总结 51
致谢 61
参考文献 62