设计简介
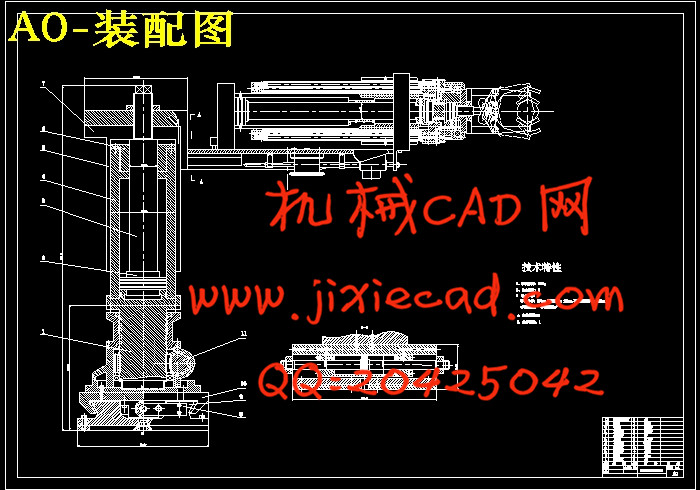
1.4.1 臂力确定
国内目前使用的机械手的臂力范围较大,现有的机械手的臂力最小为0.15N,最大为8000N。本机械手的臂力为N臂 =1650(N),安全系数k般可在1.5~3,本机械手取安全系数k=2。定位精度为±1mm。
1.4.2 工作范围确定
本机械手的工作范围需要根据工艺要求和操作运动的轨迹去确定。一个操作运动的轨迹是由几个动作的合成,在确定工作范围时,可将轨迹分解成若干个单个的动作,由单个动作的行程来确定机械手最大行程。此机械手动作范围确定如下:
手腕回转角度=±115°;
手臂伸长量=150mm;
手臂回转角度=±115°;
手臂升降行程=170mm;
手臂水平运动行程=100mm;
1.4.3 确定各运动速度
机械手的各动作的最大行程确定以后,可以根据生产需要分配每个动作的时间,进而来确定各动作运动速度。机械手要完成整个过程,需完成夹紧工件,手臂升降,伸缩,回转,平移等一系列动作,这些动作都应该在规定的时间内完成。具体时间分配取决于很多因素,根据对各种因素反复考虑,对分配的方案进行反复比较才能确定。
机械手的总动作的时间应小于或等于工作拍节,如果需要两个动作同时进行,要按时间长的去计算,分配各动作的时间应考虑以下要求:
① 给定运动的时间应大于电气或液压元件的执行时间;
② 伸缩运动,速度要大于回转运动速度,因为回转运动的惯性一般会大于伸缩运动的惯性。在满足于工作拍节要求的条件下,应该尽量去选取较底的运动速度。机械手运动的速度与臂力,行程,驱动方式,缓冲方式,定位方式之间都有很大关系,应根据具体情况具体分析。
③ 在工作拍节短的、动作多的情况下,常需要几个动作同时进行。因此驱动系统要采取相应措施,以此来保证动作同步。
机械手的各运动速度如下:
手腕的回转速度 v腕回 = 40°/s;
手臂的伸缩速度 v臂伸 = 50 mm/s;
手臂的回转速度 v臂回 = 40°/s;
手臂的升降速度 v臂升 = 50 mm/s;
立柱的水平运动速度 v柱移 = 50 mm/s;
手指夹紧油缸运动速度 v夹 = 50 mm/s;
1.4.4 手臂配置形式
机械手的手臂的配置形式基本上能反映它的总体布局。运动要求,操作环境。工作对象的不同,手臂的配置形式也大不相同。本机械手采用的是机座式。机座式得结构多被工业机器人采用,机座上可装上独立的控制设备,便于搬运和安放,机座底部也可以安装行走设备,用已扩大机械的活动范围,分为1.手臂配置在机座顶部,,2.手臂配置在机座立柱上两种形式,本机械手主要采用手臂配置在机座的立柱上的形式。手臂配置在机座立柱上的机械手大多为圆柱坐标型,它有升降、伸缩与回转运动,工作范围比较大。
1.4.5 位置的检测装置的选择
机械手常用位置检测方式主要有三种:1.行程开关式、2.模拟式,3.数字式。本机械手主要采用行程开关式。利用行程开去关检测位置,精度较低,一般需要与机械挡块联合应用。在机械手中,采用行程开关与机械挡块检测定位不但精度高而且简单实用可靠,故也是应用最多的。
1.4.6 驱动与控制方式选择
机械手的驱动与控制方式是根据它们的特点,结合生产工艺要求来选择的,需要要尽量去选择控制性能好、体积小、维修方便、成本底的方式。
控制系统也有许多不同的类型。除了一些专用机械手以外,大多数的机械手均需要进行专门控制系统的设计。
驱动的方式一般有四种:气压驱动、液压驱动、电气驱动和机械驱动。
参考《工业机器人》表9-6和表9-7,按照设计要求,本机械手采用的驱动方式为液压驱动,控制方式为固定程序的PLC控制。
目 录
1.2 世界机器人的发展--------------------------------------------------------(1)
1.3 我国工业机器人的发展----------------------------------------------------(1)
1.4 我要设计的机械手--------------------------------------------------------(1)
1.4.1 臂力的确定---------------------------------------------------------------------------------------(2)
1.4.2工作范围的确定----------------------------------------------------------------------------------(2)
1.4.3 确定运动速度--------------------------------------------------------(2)
1.4.4 手臂的配置形式------------------------------------------------------(3)
1.4.5 位置检测装置的选择--------------------------------------------------(3)
1.4.6 驱动与控制方式的选择------------------------------------------------(3)
2 手部结构------------------------------------------------------------------------------------------(3)
2.1概述-------------------------------------------------------------------------------------------------------(3)
2.2 设计时应考虑的几个问题----------------------------------------------------------------------------(3)
2.3 驱动力的计算 -----------------------------------------------------------------------------------------(4)
3 腕部的结构---------------------------------------------------------------------------------------(5)
3.1 概述------------------------------------------------------------------------------------------------------(5)
3.2 腕部的结构形式--------------------------------------------------------------------------------------(5)
3.3手腕驱动力矩的计算-----------------------------------------------------(6)
4 臂部的结构-------------------------------------------------------------------------------------(8)
4.1 概述----------------------------------------------------------------------------------------------------(8)
4.2手臂直线运动机构-----------------------------------------------------------------------------------(8)
4.2.1手臂伸缩运动------------------------------------------------------------------------------------(8)
4.2.2 手臂的升降运动-------------------------------------------------------------------------------(9)
4.3 手臂回转运动----------------------------------------------------------------------------------------(9)
4.4 手臂的横向移动-------------------------------------------------------------------------------------(10)
4.5 臂部运动驱动力计算------------------------------------------------------------------------------(10)
4.5.1 臂水平伸缩运动驱动力的计算------------------------------------------------------------(10)
4.5.2 臂垂直升降运动驱动力的计算------------------------------------------------------------(11)
4.5.3 臂部回转运动驱动力矩的计算---------------------------------------(11)
5 液压系统的设计-----------------------------------------------------------------------------(11)
5.1液压系统简介---------------------------------------------------------------------------------------(11)
5.2液压系统的组成------------------------------------------------------------------------------------(12)
5.3机械手液压系统的控制回路---------------------------------------------(12)
5.3.1 压力控制回路-------------------------------------------------------------------------------(12)
5.3.2 速度控制回路-------------------------------------------------------------------------------(12)
5.3.3 方向控制回路-----------------------------------------------------------------------------------(13)
5.4 机械手的液压传动系统----------------------------------------------------------------------------(13)
5.4.1 上料机械手的动作顺序----------------------------------------------------------------------(13)
5.4.2 自动上料机械手液压系统原理介绍-------------------------------------------------------(13)
5.5机械手液压系统的简单计算-----------------------------------------------(15)
5.5.1 双作用单杆活塞油缸------------------------------------------------(16)
5.5.2 无杆活塞油缸(亦称齿条活塞油缸)----------------------------------(17)
5.5.3 单叶片回转油缸 ---------------------------------------------------(18)
5.5.4 油泵的选择--------------------------------------------------------(19)
5.5.5 确定油泵电动机功率N ----------------------------------------------(19)
6 PLC控制回路的设计-----------------------------------------------------------------------(19)
6.1 现场器件与PLC内部等效继电器地址编号的对照表---------------------------------------(19)
6.2 PLC与现场器件的实际连接图------------------------------------------------------------------(20)
6.3 梯形图-------------------------------------------------------------------------------------------------(21)
6.4 指令程序-----------------------------------------------------------------------------------------------(22)
7 结束语 -----------------------------------------------------------------------------------------------------(26)
8致 谢 ------------------------------------------------------------------------------------------(27)
9参考文献--------------------------------------------------------------------------------------------------(28)
国内目前使用的机械手的臂力范围较大,现有的机械手的臂力最小为0.15N,最大为8000N。本机械手的臂力为N臂 =1650(N),安全系数k般可在1.5~3,本机械手取安全系数k=2。定位精度为±1mm。
1.4.2 工作范围确定
本机械手的工作范围需要根据工艺要求和操作运动的轨迹去确定。一个操作运动的轨迹是由几个动作的合成,在确定工作范围时,可将轨迹分解成若干个单个的动作,由单个动作的行程来确定机械手最大行程。此机械手动作范围确定如下:
手腕回转角度=±115°;
手臂伸长量=150mm;
手臂回转角度=±115°;
手臂升降行程=170mm;
手臂水平运动行程=100mm;
1.4.3 确定各运动速度
机械手的各动作的最大行程确定以后,可以根据生产需要分配每个动作的时间,进而来确定各动作运动速度。机械手要完成整个过程,需完成夹紧工件,手臂升降,伸缩,回转,平移等一系列动作,这些动作都应该在规定的时间内完成。具体时间分配取决于很多因素,根据对各种因素反复考虑,对分配的方案进行反复比较才能确定。
机械手的总动作的时间应小于或等于工作拍节,如果需要两个动作同时进行,要按时间长的去计算,分配各动作的时间应考虑以下要求:
① 给定运动的时间应大于电气或液压元件的执行时间;
② 伸缩运动,速度要大于回转运动速度,因为回转运动的惯性一般会大于伸缩运动的惯性。在满足于工作拍节要求的条件下,应该尽量去选取较底的运动速度。机械手运动的速度与臂力,行程,驱动方式,缓冲方式,定位方式之间都有很大关系,应根据具体情况具体分析。
③ 在工作拍节短的、动作多的情况下,常需要几个动作同时进行。因此驱动系统要采取相应措施,以此来保证动作同步。
机械手的各运动速度如下:
手腕的回转速度 v腕回 = 40°/s;
手臂的伸缩速度 v臂伸 = 50 mm/s;
手臂的回转速度 v臂回 = 40°/s;
手臂的升降速度 v臂升 = 50 mm/s;
立柱的水平运动速度 v柱移 = 50 mm/s;
手指夹紧油缸运动速度 v夹 = 50 mm/s;
1.4.4 手臂配置形式
机械手的手臂的配置形式基本上能反映它的总体布局。运动要求,操作环境。工作对象的不同,手臂的配置形式也大不相同。本机械手采用的是机座式。机座式得结构多被工业机器人采用,机座上可装上独立的控制设备,便于搬运和安放,机座底部也可以安装行走设备,用已扩大机械的活动范围,分为1.手臂配置在机座顶部,,2.手臂配置在机座立柱上两种形式,本机械手主要采用手臂配置在机座的立柱上的形式。手臂配置在机座立柱上的机械手大多为圆柱坐标型,它有升降、伸缩与回转运动,工作范围比较大。
1.4.5 位置的检测装置的选择
机械手常用位置检测方式主要有三种:1.行程开关式、2.模拟式,3.数字式。本机械手主要采用行程开关式。利用行程开去关检测位置,精度较低,一般需要与机械挡块联合应用。在机械手中,采用行程开关与机械挡块检测定位不但精度高而且简单实用可靠,故也是应用最多的。
1.4.6 驱动与控制方式选择
机械手的驱动与控制方式是根据它们的特点,结合生产工艺要求来选择的,需要要尽量去选择控制性能好、体积小、维修方便、成本底的方式。
控制系统也有许多不同的类型。除了一些专用机械手以外,大多数的机械手均需要进行专门控制系统的设计。
驱动的方式一般有四种:气压驱动、液压驱动、电气驱动和机械驱动。
参考《工业机器人》表9-6和表9-7,按照设计要求,本机械手采用的驱动方式为液压驱动,控制方式为固定程序的PLC控制。
目 录
1 机械手的介绍
1.1 工业机器人简介----------------------------------------------------------(1)1.2 世界机器人的发展--------------------------------------------------------(1)
1.3 我国工业机器人的发展----------------------------------------------------(1)
1.4 我要设计的机械手--------------------------------------------------------(1)
1.4.1 臂力的确定---------------------------------------------------------------------------------------(2)
1.4.2工作范围的确定----------------------------------------------------------------------------------(2)
1.4.3 确定运动速度--------------------------------------------------------(2)
1.4.4 手臂的配置形式------------------------------------------------------(3)
1.4.5 位置检测装置的选择--------------------------------------------------(3)
1.4.6 驱动与控制方式的选择------------------------------------------------(3)
2 手部结构------------------------------------------------------------------------------------------(3)
2.1概述-------------------------------------------------------------------------------------------------------(3)
2.2 设计时应考虑的几个问题----------------------------------------------------------------------------(3)
2.3 驱动力的计算 -----------------------------------------------------------------------------------------(4)
3 腕部的结构---------------------------------------------------------------------------------------(5)
3.1 概述------------------------------------------------------------------------------------------------------(5)
3.2 腕部的结构形式--------------------------------------------------------------------------------------(5)
3.3手腕驱动力矩的计算-----------------------------------------------------(6)
4 臂部的结构-------------------------------------------------------------------------------------(8)
4.1 概述----------------------------------------------------------------------------------------------------(8)
4.2手臂直线运动机构-----------------------------------------------------------------------------------(8)
4.2.1手臂伸缩运动------------------------------------------------------------------------------------(8)
4.2.2 手臂的升降运动-------------------------------------------------------------------------------(9)
4.3 手臂回转运动----------------------------------------------------------------------------------------(9)
4.4 手臂的横向移动-------------------------------------------------------------------------------------(10)
4.5 臂部运动驱动力计算------------------------------------------------------------------------------(10)
4.5.1 臂水平伸缩运动驱动力的计算------------------------------------------------------------(10)
4.5.2 臂垂直升降运动驱动力的计算------------------------------------------------------------(11)
4.5.3 臂部回转运动驱动力矩的计算---------------------------------------(11)
5 液压系统的设计-----------------------------------------------------------------------------(11)
5.1液压系统简介---------------------------------------------------------------------------------------(11)
5.2液压系统的组成------------------------------------------------------------------------------------(12)
5.3机械手液压系统的控制回路---------------------------------------------(12)
5.3.1 压力控制回路-------------------------------------------------------------------------------(12)
5.3.2 速度控制回路-------------------------------------------------------------------------------(12)
5.3.3 方向控制回路-----------------------------------------------------------------------------------(13)
5.4 机械手的液压传动系统----------------------------------------------------------------------------(13)
5.4.1 上料机械手的动作顺序----------------------------------------------------------------------(13)
5.4.2 自动上料机械手液压系统原理介绍-------------------------------------------------------(13)
5.5机械手液压系统的简单计算-----------------------------------------------(15)
5.5.1 双作用单杆活塞油缸------------------------------------------------(16)
5.5.2 无杆活塞油缸(亦称齿条活塞油缸)----------------------------------(17)
5.5.3 单叶片回转油缸 ---------------------------------------------------(18)
5.5.4 油泵的选择--------------------------------------------------------(19)
5.5.5 确定油泵电动机功率N ----------------------------------------------(19)
6 PLC控制回路的设计-----------------------------------------------------------------------(19)
6.1 现场器件与PLC内部等效继电器地址编号的对照表---------------------------------------(19)
6.2 PLC与现场器件的实际连接图------------------------------------------------------------------(20)
6.3 梯形图-------------------------------------------------------------------------------------------------(21)
6.4 指令程序-----------------------------------------------------------------------------------------------(22)
7 结束语 -----------------------------------------------------------------------------------------------------(26)
8致 谢 ------------------------------------------------------------------------------------------(27)
9参考文献--------------------------------------------------------------------------------------------------(28)