设计简介
摘要
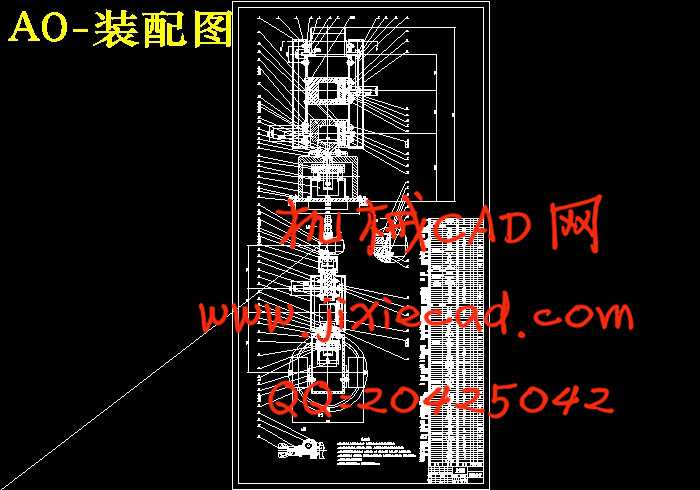
状配是产品生产的后续工序, 在制造业中占有重要地位, 在人力、物力、财力消耗中占有很大比例,所以为了节约装配时间,实现装配的自动化,装配机器人应运而生。本文介绍了装配机器人的设计过程,其中绪论中介绍了设计的背景和意义,还有简要的设计要求,然后根据设计要求先进行机器人的总体设计,接着针对每个部分进行了具体的结构设计,最后为该机器人设计了一套单片机控制系统。所设计的机器人为关节型机器人,自由度为六个;应用步进电机来驱动每个关节的运动;在减速器设计中应用了结构紧凑的谐波齿轮减速;在传动过程应用了同步带传动;机器人的控制系统为基于单片机STC89C52的控制步进电机的控制系统。
关键词:工业机器人;谐波齿轮减速;单片机控制;生产线
Abstract
Assembly is a follow-up production processes in the manufacturing sector, which plays an important role in the manufacturing. It takes a large proportion in the consumption of human, material and financial, so in order to save assembly time, to achieve the automation of the assembly, the assembly robot came into being. This article describes the design process of the assembly robot. There are the background and significance of the design in the introduction, which followed by a brief design requirements. And then it is described the overall design of the robot according to the requirements, and then the concrete structure design. Finally, a microcomputer control system for the robot is designed. The robot is articulated robot of 6 degrees of freedom. Stepper motor is applied in driving the movement of each joint. The harmonic gear is applied in the compact design. Timing belt is used in the transmission process. The control system which mainly controls the stepper motors is based on microcontroller STC89C52
Keywords : Industrial robots; harmonic gear; microcomputer control; production line
目录
摘要 I
Abstract II
第1章 绪论 1
1.1装配机器人的概念 1
1.2工业机器人的分类 1
1.3工业机器人的基本结构 2
1.4装配机器人发展现状 2
1.5装配机器人发展趋势 4
1.6课题研究的意义与内容 5
第2章 装配机器人的总体设计 7
2.1设计目标和设计内容 7
2.2设计方案 7
2.2.1 运动方案的确定 7
2.2.2 传动方式的确定 8
2.2.3 驱动电机的选择 9
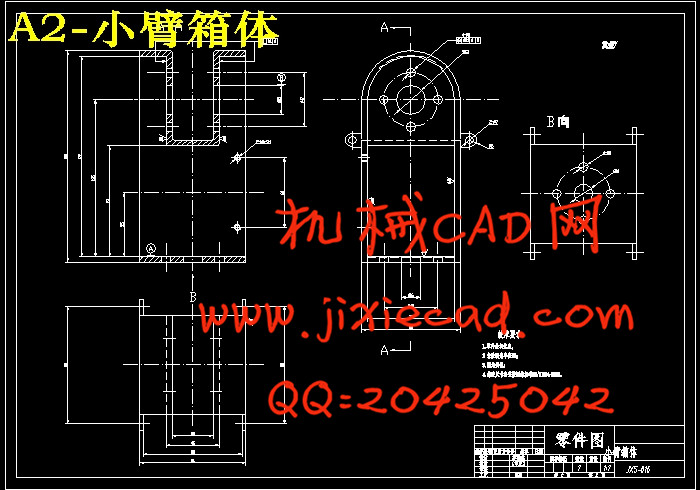
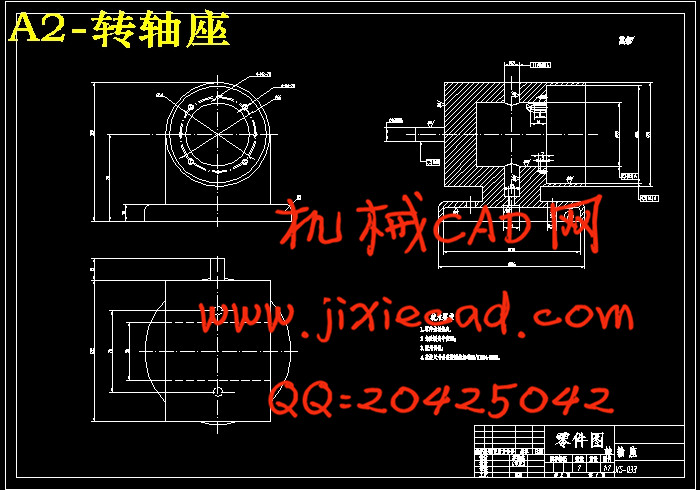
第3章 装配机器人手臂各部分的结构设计 10
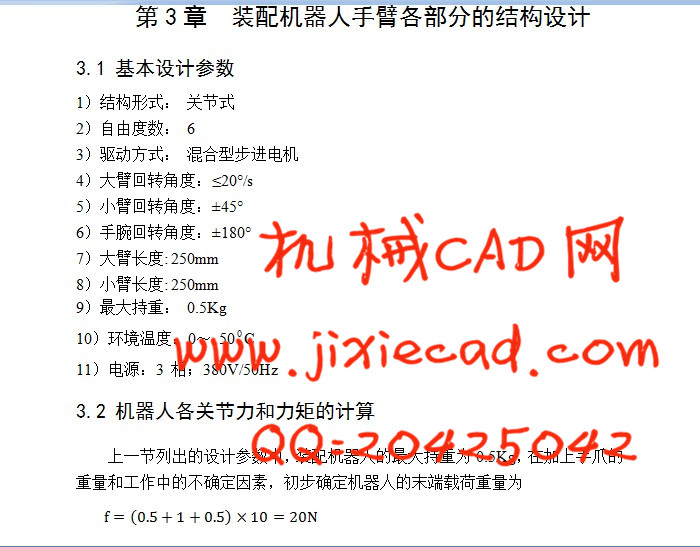
3.1 基本设计参数 10
3.2 机器人各关节力和力矩的计算 10
3.3 机器人各关节结构的设计 13
3.3.1 关节1(腰部)的结构设计 13
3.3.3 关节3的结构设计 18
3.3.4 手腕的结构设计 20
3.3.5 手爪的结构设计 22
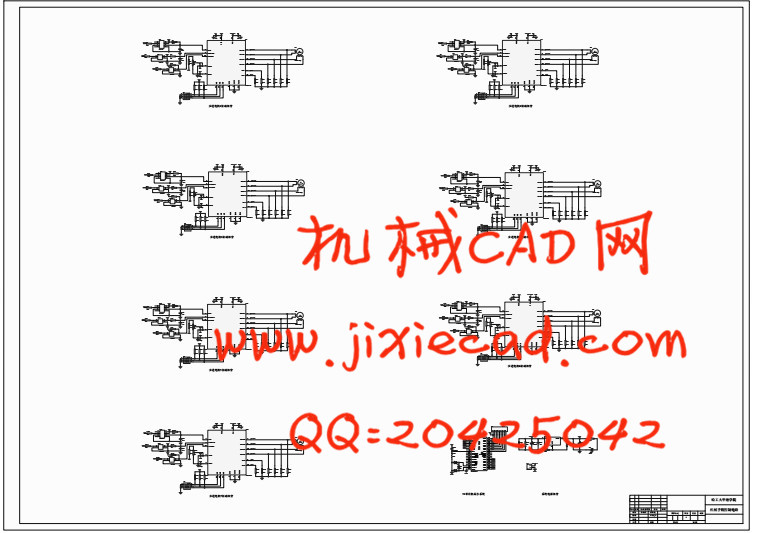
第4章 装配机器人控制系统硬件设计 28
4.1控制电路各芯片的选择 28
4.2控制电路原理图的设计 31
结论 33
致谢 34
参考文献 35
状配是产品生产的后续工序, 在制造业中占有重要地位, 在人力、物力、财力消耗中占有很大比例,所以为了节约装配时间,实现装配的自动化,装配机器人应运而生。本文介绍了装配机器人的设计过程,其中绪论中介绍了设计的背景和意义,还有简要的设计要求,然后根据设计要求先进行机器人的总体设计,接着针对每个部分进行了具体的结构设计,最后为该机器人设计了一套单片机控制系统。所设计的机器人为关节型机器人,自由度为六个;应用步进电机来驱动每个关节的运动;在减速器设计中应用了结构紧凑的谐波齿轮减速;在传动过程应用了同步带传动;机器人的控制系统为基于单片机STC89C52的控制步进电机的控制系统。
关键词:工业机器人;谐波齿轮减速;单片机控制;生产线
Abstract
Assembly is a follow-up production processes in the manufacturing sector, which plays an important role in the manufacturing. It takes a large proportion in the consumption of human, material and financial, so in order to save assembly time, to achieve the automation of the assembly, the assembly robot came into being. This article describes the design process of the assembly robot. There are the background and significance of the design in the introduction, which followed by a brief design requirements. And then it is described the overall design of the robot according to the requirements, and then the concrete structure design. Finally, a microcomputer control system for the robot is designed. The robot is articulated robot of 6 degrees of freedom. Stepper motor is applied in driving the movement of each joint. The harmonic gear is applied in the compact design. Timing belt is used in the transmission process. The control system which mainly controls the stepper motors is based on microcontroller STC89C52
Keywords : Industrial robots; harmonic gear; microcomputer control; production line
目录
摘要 I
Abstract II
第1章 绪论 1
1.1装配机器人的概念 1
1.2工业机器人的分类 1
1.3工业机器人的基本结构 2
1.4装配机器人发展现状 2
1.5装配机器人发展趋势 4
1.6课题研究的意义与内容 5
第2章 装配机器人的总体设计 7
2.1设计目标和设计内容 7
2.2设计方案 7
2.2.1 运动方案的确定 7
2.2.2 传动方式的确定 8
2.2.3 驱动电机的选择 9
第3章 装配机器人手臂各部分的结构设计 10
3.1 基本设计参数 10
3.2 机器人各关节力和力矩的计算 10
3.3 机器人各关节结构的设计 13
3.3.1 关节1(腰部)的结构设计 13
3.3.3 关节3的结构设计 18
3.3.4 手腕的结构设计 20
3.3.5 手爪的结构设计 22
第4章 装配机器人控制系统硬件设计 28
4.1控制电路各芯片的选择 28
4.2控制电路原理图的设计 31
结论 33
致谢 34
参考文献 35